113033582
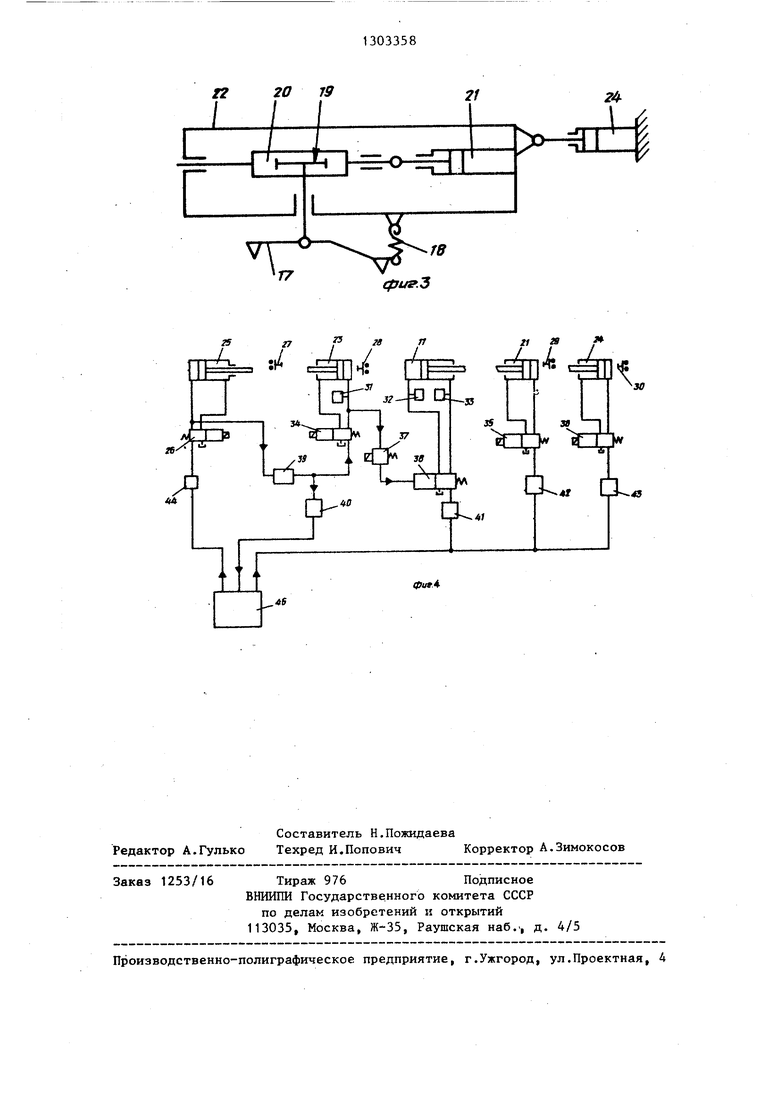
Изобретение относится к оборудова- гидроцилиндрами 21,23 и 24 осущест- нию для сборки и разборки в частное- вляют конечные выключатели 27-30 и ти к устройствам для демонтажа дета- реле давления 31,32 и 33, включающие лей типа пазовых клиньев якорей элек- электрозолотники 34,35 и 36 и напор- тродвигателей.5 ный золотник 37, управляющий гидродиЦелью изобретения является повьшш- линдром 38. Для последовательного ние производительности путем автомати- включения гидроцилиндров 11,23 и 25 зации процесса демонтажа.установлены напорные золотники 37 и
Поставленная цель достигается пу- ,., 9, а для изменения скорости движения тем снабжения устройства приспособле- поршней в гидроцнлиндрах 11,21,23,24 иГ ниями для установки демонтируемого уз- 25 установлены регуляторы потока 40- ла и механизмом ориентации этого уз- Подача масла в гидросистему осу- ла, способным поворачивать последний Ществляется насосной станцией 45. на определенный шаг, причем работа ,5 работает следующим об- этого механизма согласована с работой разом, механизма выпрессовки. включении устройства подвижная
На фиг.1 изображено устройство, об- каретка 7 с механизмом выбивки пазовых щий вид; на фиг.2 - кинематическая клиньев 5 перемещается по направляю- схема механизма выпрессовки пазовых 20 станины 1 станка гидроцилиндром клиньев; на фиг.З - кинематическая 23 до момента упора бойка 10 в клин 5 схема механизма ориентации; на фиг.4 - электродвигателя. В случае, если клин гидравлическая схема станка.5 не стронулся с места, подвижная каУстройство содержит станину 1 со ретка 7 продолжает давить на него, а стационарно установленными на ней пе-25 давления 31 подает команду на редней 2 и задней 3 бабками с подвиж- включение гидроцилиндра 11 передвиже- HbiiMH центрами для установки между ния копира 15. Копир 15 начинает дви- ними якоря 4 электродвигателя, имеюще- гаться и своим уступом перемещает го пазовые клинья 5. На направляющих ударник 12, который также приходит в 6 станины 1 станка установлена под- движений и сжимает пружину 13. При вижная основная каретка 7, в корпусе достижении копиром 15 крайнего левого 8 которой выполнен продольный паз 9, положения срабатывает реле давления по оси которого установлены выполнен- 33, которое включает напорный золот- ный по форме сечения клина 5 боек 10, ник 37, включающий гидрозолотник 38, связанный с дополнительным гидроци- и гидроцилиндр 11 переводит копир 15 линдром 11, и ударник 12 с собачкой в исходное положение. В это же время 13, удерживаемый пружиной 14. Указан- ударник 15 остается на месте, удержи- ные элементы и приводящий копир 15 об- ваемый собачкой 14. Дойдя до правого разуют механизм выбивки пазовых клинь- крайнего положения, копир 15 другим ев 5. На направляющих 6 станины 1 Q своим уступом нажимает на собачку 14, станка установлена и вторая подвижная которая освобождает ударник 12, и пру- каретка 16 с коромыслом 17, подпружи- жина 13 толкает ударник 12 на боек 10. ненным пружиной 18. Коромысло 17 с Клин 5 якоря электродвигателя получа- пружиной 18 установлено на оси зубча- ет удар бойка 10, воспринимая кроме того колеса 19, находящегося в зацеп- ., статической нагрузки и импульсную лении с зубчатой рейкой 20. Указан- нагрузку от ударов ударника 12 по ные элементы и вспомогательный гидро- бойку 10. Если клин 5 опять не сдви- цилиндр 21 образуют механизм ориента- нулся с места, то поступает новая ко- ции якоря 4 электродвигателя, смонти- манда от реле давления 31 и 32 на рованный в корпусе 22 подвижной ка- , включение гидроцилиндра 11 механизма ретки 16. Корпус 8 основной подвиж- выбивки и удары бойка 10 по клину 5 ной каретки 7 и корпус 21 подвижной будут продолжаться до тех пор, пока каретки 16 соответственно связаны с клин 5 не стронется с места и давление основньм гидроцилиндром 23 и гидро- в гидросистеме не упадет ниже настрой- цилиндром 24. Для осуществления зажи- ки реле давления 31. Одновременно кома якоря 4 электродвигателя в центрах ромысло 17 механизма ориентации якоря передней 2 и задней 3 бабках станка 4 электродвигателя одним своим конус- установлен гидроцилиндр 25, управляе- ным концом установлено в паз вала мый электрозолотником 26. Управление якоря 4 электродвигателя, а другим на клин 5. При подходе бойка 10 к мханизму ориентации, который смещает на подвижной каретке 16 вправо, вклчаются конечный выключатель 28 и элтрозолотник 34, управляющий гидроци линдром 23. Подвижная каретка 7 с мханизмом выбивки отходит в исходное положение и на место выбитого клина опускается конец коромысла 17, увлекаемого пружиной 18, а другой конец коромысла 17 выходит из шпоночного паза на валу якоря 4 электродвигателя. Подвижная каретка 7 и левом положении замыкает конечный выключатель
27, который дает команду на элек- ро-
золотник 35, управляющий гидроцилиндром 21 поворота коромысла 17. Коромыло 17 поворачивает якорь 4 электродвигателя на требуемый угол подачи очередного пазового клина 5 и замы- кает конечный выключатель 29, подающ команду на электрозолоник 34 гидроцилиндра 23. Затем подвижная каретка 7 вновь перемещается вправо и цикл пов торяется, но ориентация якоря 4 элек тродвигателя и его фиксация осуществляется уже за паз предыдущего выбитого клина 5. Передвижная каретка 7, дойдя до своего правого положения, замыкает конечный выключатель 28, прдакицйй команду на электрозолотник 36, включающий гидроцилиндр 24, который отводит передвижную каретку 7 с механизмом выбивки. Каретка 7 идет вправо и, дойдя до крайнего положе- НИЛ, поворачивает коромысло 17 гидроцилиндром I 21 в исходное горизонтальное положение. Затем подвижная каретка 7 с механизмом выбивки идет влево и одновременно с ней идет подвиж- ная каретка 16с механизмом ориентации., перемемещаемая гидроцилиндром 24 управляемого электрозолотником 36. Конец коромысла 17 заходит во вновь освободившийся паз клина 5 и
- v- - yjJXVx у jL
ком и приводом
ждет команды на поворот якоря 4 электродвигателя от идущей влево каретки 7, замыкающей в крайнем левом положении выключатель 27, дающий команду на поворот якоря. Якорь 4 электродвигателя поворачивается и каретка 7 вновь идет на выбивку очередного пазового клина 5.
Формула изобретения
Устройство для демонтажа деталей типа клиньев, содержащее механизм вьшрессовки ударного действия с бойв виде двух сшювых
цилиндров - основного и дополнительного, отличающееся , что, с целью повьш1ения производительности, оно снабжено станиной с направляющими, установленными на станине передней и задней бабками с подвижными центрами, двумя KapeT«ahm, установленными с возможностью перемещения в направляющих станины, одна из которых - основная - связана со штоком основного силового цилиндра, механизмом ориентации дёмонт1фу- емого узла, размещенным во второй каретке, механизм выпрессовки смонтирован в основной каретке и выполнен в виде установленных с возможностью перемещения и последовательного взаимодействия подпружиненного ударника собачки и копира, причем последний связан со штоком дополнительного силового цилиндра, а ударник установлен с возможностью взаимодействия с бойком, механизм ориентации выполнен в виде щарнирно установленного, подпружиненного коромысла с приводом углового перемещения в виде вспомогательного силового цилиндра, шток которого посредством реечной зуб- чотой передачи связан с коромыслом.
FH
vW П
TvpnLlf
f3
14
К20 79
2124

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ И ФИКСАЦИИ ДЕТАЛЕЙ ТИПА ЗУБЧАТАЯ РЕЙКА | 1989 |
|
RU2023545C1 |
| Станок для наложения корпусной ленточной изоляции на обмотки электрических машин | 1977 |
|
SU692009A1 |
| Устройство для измерения размера разгрузочной щели конусной дробилки | 1977 |
|
SU733725A1 |
| Гидравлическое устройство для автоматического управления работой ленточно-шлифовального станка, обрабатывающего перо лопатки | 1960 |
|
SU140703A1 |
| Сборочная линия | 1985 |
|
SU1255352A1 |
| ФРЕЗЕРНЮ-ОТРЕЗНОЙ СТАНОК ДЛЯ ИЗМЕРЕНИЯ И ДЕЛЕНИЯ ЗАГОТОВКИ БЕЗ ОСТАТКА | 1973 |
|
SU382480A1 |
| Автомат для навивки пружин | 1979 |
|
SU860922A1 |
| Копировально-фрезерный станок | 1976 |
|
SU650809A1 |
| Шрифтолитейная машина для отливки литер из пластмассы | 1970 |
|
SU322037A1 |
| Станок для обработки концов деревянных вагонных стоек | 1982 |
|
SU1074718A1 |
Изобретение относится к области i механосборочного производства, в частности к устройствам для демонтажа деталей типа пазовых клиньев якорей электродвигателей. Изобретение позволяет повысить производительность устройства для демонтажа путем снабжения его механизмом ориентации разбираемого узла и согласования работы этого механизма с механизмом выпрессовки ударного действия. Демонтируемыл узел зажимаетЪя выдвижными центрами, установленными в бабках 2 и 3. Лри включении устройства подвижная каретка (К) 7 с механизмом выпрессовки перемещается по направляющим станины от привода в виде силового цилиндра (СЦ).. Боек 10 упирается в клин 5 и, если последний не тронулся с места, подается команда на механизм выпрессовки ударного действия, включающий в себя дополнительный. СЦ, копир, собачку и ударник, взаимодействующий с бойком 10. Удары бойка по клину будут продолжаться до тех пор, пока последний не начнет перемещаться. После этого реле давления и конечный вьжлю- чатель подают команды на отвод К7 и включение механизма ориентации, размещенного в К 16. Последний выполнен в виде шарнирно установленного подпружиненного коромысла 17, конец которого, взаимодействуя с пазом якоря, поворачивает последний на определенный угол. Привод коромысла выполнен в виде СЦ и зубчатой реечной передачи. После поворота демонтируемого узла подается команда на подвод механизма выпрессовки и цикл повторяется. 4 ил. S сл со о 00 со СП 00 Ф1/г
фи.
a гв n
//
-BD
Q .,Д
37
k
J
«fl
/
.
Составитель Н.Пожидаева Редактор А.Гулько Техред И.Попович Корректор А.Зимокосов
Заказ 1253/16
Тираж 976Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб.-, д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
| 0 |
|
SU160077A1 | |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| . | |||
