Изобретение относится к MauiHiiocTpoe- нию, а именно к нромышленным роботам для механизации и автоматизации технологических онераний.
и,ель изобретения улучшение динамики торможения привода и повышение ei o комнактиости.
На че)теже приведен нривод.
Привод состоит нз силового цилиндра 1, полости 2 и 3 которого носредством отводных магистралей 4 и 5 сообыдены с распределителями 6 и 7 соответствемио.
На напорных магистралях 8 и 9 каждого распределителя 6 (7) установлены обратные клапаны 10 и 11. Клапан 12 каждого распределителя 6 (7) взаимодействует с выхлопным каналом 13, связанным с тормозным клапаном 14, имеющим дроссс,1Ь 15, предназначенный для регулирования скорости перемен1ения штока 16 силового цилиндра 1 в процессе торможения, и камеру 17, которая сообн1,ена с атмосферой через дроссе, 1ь 18, служап;ий для регулирования скорости перемещения 1птока 16 в процессе рабочего неремешения. Камера 17 ограничена сверху диафрагмой 19, подпружиненной пружиной 20 и снабженной клананом 21, служащим для за 1ира11ия выхлопного канала 13 при повышении давления сжатого воздуха в камеру 22 управления тормозным клапаном 14. Камера 22 клапана 14 магистралью 23 связана с полостью 2, а ана.югпчная камера клапана 24 магистра.лью 25 связана с полостью 3 си;1ового цилиндра 1, па котором установ;1ены датчики 26 и 27 положения П1тока 16, сигналы от которых ностуиают в узел управления, вынолненпый в виде ДВУХ одновибраторов 28 и 29. Одновибраторы 28 и 29 являются промежуточным звеном между датчиками торможения и системой нрог- раммного управлепия 30 и предназначены для подачи в последнюю сигналов определенной длительности (во BpeMetu-i).
Привод промы1плепног-о робота работает следуюп1им образом.
При подаче сжато1 о воздуха раснреле- лителем 7 в полость 3 силового цилиндра 1 П1ТОК 16 начинает иеремениггься влево (но чертежу).
Вытесняем 1)1 и из полости 2 воздух но ма- гистра.лям 4 и 23 поступает в камеру 22 тормозного клапана 14. l-Jo жесткость пружины 20 подобрапа в зависимости от плон1,а- ди диафрагмы 19 таким образом, что небольшое давление воздуха, вытесняемого из полости 2 в процессе неремеп1е)ия пгго- ка 16 влево, не может преодолеть усилия пружины 20 и закрыть выхлопной капал 13 клапаном 21.
Составитель Е. Ермолаев
Редактор , 1. ИчолимскаяТехред И. ВересКорректор А. Обручар
Заказ 1257/18Тираж 954Подписное
lil ll ll Il lll Государственного комитета ruj делам изобретений и открыти
1 13035, .Иосква, Ж . Раушская наб., д. 4;5 11ро||знодсгве11ио-| ол11гра |)ическое предприятие, . жгоро.ч, ул. Проектиая, 4
0
5
0
Таким образом, вытесняемый из полости 2 воздух стравливается в атмосферу через оба дросселя 5 и 18.
При подходе штока 16 к концу хода срабатывает датчик 27, посылающий сигнал через одновибратор 29 в систему программного управлепия 30, которая выдает кома пду на включение распределителя 6 па оп- ределеппое время по выдержке времени.
При этом сжатый воздух по магистра- ;1и 4 кратковременно поступает в полость 2 силового цилиндра 1, а также по магистрали 23 в камеру 22 клапана 14. Диафрагма 19 прогибается и клапан 21 закрывает выхлопной канал 13.
При возрастании давления в нолости 2 до величины давления в источнике питания обратный кланан 10 запирает магистраль 8.
Сжатие возду1нной подуп ки при дальней- HiCM перемещении пггока 16 во временно з.амкнутой нолости 2 резко снижает его скорость.
После кратковременной выдержки выключается распределитель 6, воздух из воздуп - пой подушки полости 3 пачинает стравливаться в атмосферу только через малое дроссе.лируемое отверстие дросселя 15, так как диафрагма 19 с клапаном 21 все еще закрывает выхлопной канал 13.
Регулирование скорости П1тока 16 после резкого ган1ения начальной скорости при помощи возду1нной подугпки и безударная остановка его в конце хода обеспечивается малым дросселем 15.
Таким образо.м обеспечивается эффективное торможепие быстро перемещающегося нп ока и безударная его остановка в конце хода.
Формула изобретения
Привод нромьпплепного робота, содержаний силовой цилиндр, каждая нолость которого имеет возможность пневматической связи с помопхью распределителя и управляемого тормозного клапапа с источником давления и атмосферой, обратные клапаны и систему управле 1ия с путевыми датчиками, связанную с раснределителями и тормозными кланапами, отличающийся тем, что, с Ц лью улучнления динамики торможения нривода, каждый тормозной клапан подключен к выхлопной магистрали распределителя, к папорной магистрали которого иод- ключей обратный клаиап, а его отводная магистраль связана с соответствуюпдей полостью силового цилиндра и управляемой камерой тормозного клапапа.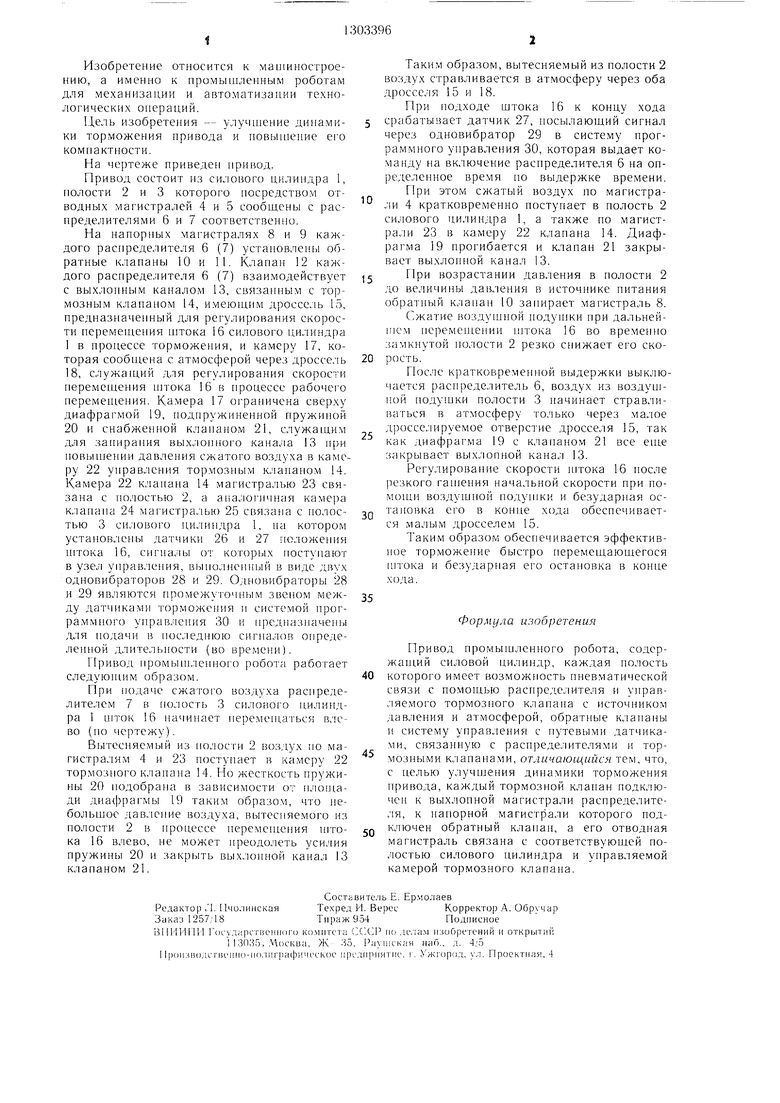
| название | год | авторы | номер документа |
|---|---|---|---|
| Тормоз наката | 1987 |
|
SU1449408A1 |
| ВОЗДУХОРАСПРЕДЕЛИТЕЛЬ | 1973 |
|
SU399416A1 |
| Устройство для управления тормозом подъемной машины | 1988 |
|
SU1523511A1 |
| Пневмопривод | 1979 |
|
SU842232A1 |
| Электровоздухораспределитель тормоза железнодорожного транспортного средства | 1989 |
|
SU1794720A1 |
| Система экстренного торможения грузового железнодорожного транспорта | 2021 |
|
RU2764309C1 |
| Воздухораспределитель | 1974 |
|
SU507737A1 |
| Электровоздухораспределитель тормоза железнодорожного транспортного средства | 1977 |
|
SU734038A2 |
| Пневматическая тормозная система | 1982 |
|
SU1041359A1 |
| Электровоздухораспределитель тормоза железнодорожного транспортного средства | 1989 |
|
SU1652142A2 |
Изобретение относится к области машиностроения и может быть использовано в промышленных роботах для механизации и автоматизации технологических операций. Целью изобретения является улучшение динамических характеристик и упрощение конструкции пневмоцилиндра. Цель достигается тем, что привод выполнен в виде силового цилиндра 1, полости 2 и 3 которого сообщены посредство.м магистралей (.) 4 и 5 с распределителями (Р) 6 и 7, причем на входно Д 8 (9) сжатого воздуха каждого Р установлен обратный клапан 10 (11) для запирания этой М и создания повышенного давления в выхлопной полости цилиндра в процессе торможения переметающегося к концу хода его штока 16. Выхлопной канал 13 каждого Р сообщен с атмосферой через малое отверстие дросселя 15, предназначенного для регулирования скорости торможения штока. Выхлопной канал сообц ен также с камерой 17, которая сообщена с атмосферой через отверстие дросселя 18, служан1его для регулирования скорости перемещения штока в процессе рабочего хода. Камера 17 oi pa- ничена сверху диафрагмой 19, подпружиненной пружиной 20 и снабженной клагшном 21 для запирания выхлопного канала 13 при повьинении давления сжатого воздуха в управляемой камере 22, которая через .V 23 сообщена с полостью 2. 1 ил. S (Л со о со со со О)
| Привод модуля промышленного робота | 1980 |
|
SU960005A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Филиппов и | |||
| Б | |||
| Тормозные устройства пневмоприводов промышленных роботов | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| - М., 1984, с | |||
| Способ сужения чугунных изделий | 1922 |
|
SU38A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
