Изобретение относится к захватным органам промьппленных роботов, используемых в устройствах для манипулирования заготовками, обрабатываемыми ковкой или металлорезанием.
Цель изобретения расширение технологических возможностей и повышение надежности захвата деталей.
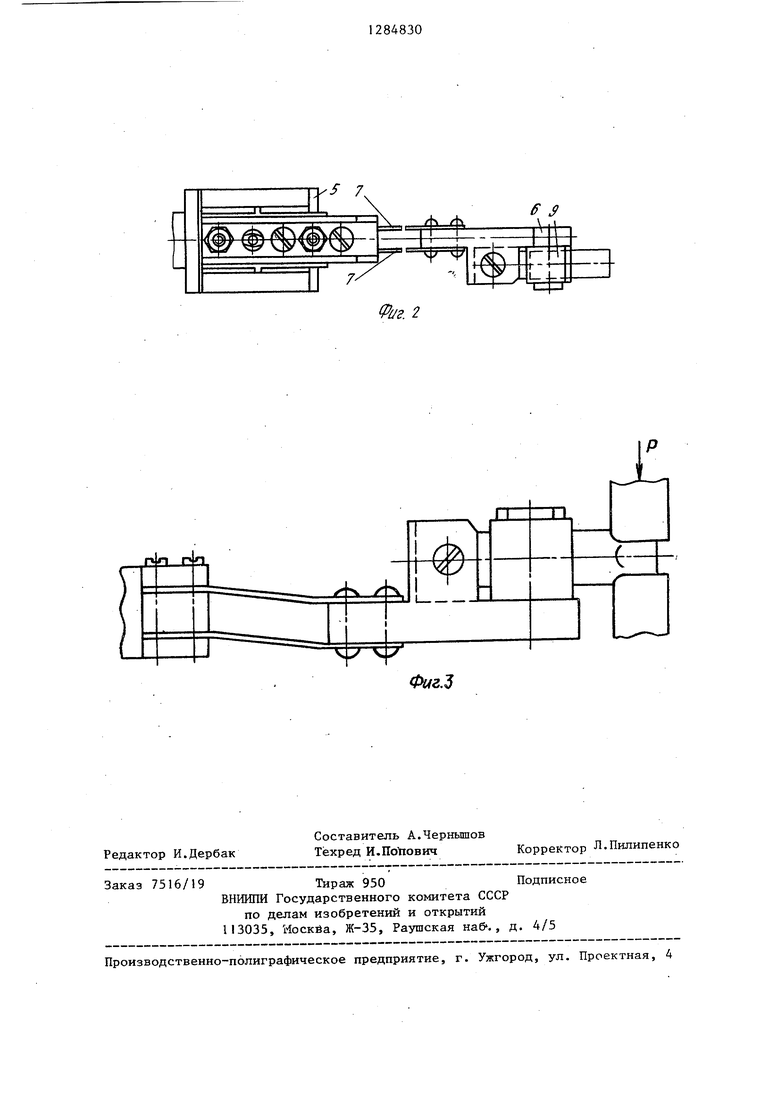
На фиг.1 изображен схват промышленного робота, общий вид; на фиг.2- то же, вид сверху; на фиг.З - схема работы узла компенсации динамических нагрузок в процессе осадки обрабатываемой детали.
Схват промьшшенного робота содержит корпус 1 с приводом 2 элементами 3 крепления к механической руке. В корпусе 1 на осях 4 установлены поворотные рычаги 5 с основными губками 6 и узлом компенсации динамических нагрузок в виде пор плоских параллельных пружин 7, соединяющих концы поворотных рычагов 5 с основными губками 6, которые предназначены для захвата деталей с поперечным расположением оси. На основных губках 6 с помощью осей 8 шарнирно закреплены дополнительные губки 9. На последних выполнены выступы 10, взаимодействующие с пружинами 11, закрепленными на основных губках 6 и удерживгиощими дополнительные губ- ки 9 в среднем положении.
Схват работает следзтощим образом.
По команде на захват детали срабатывает привод 2 поворота рычагов 5. Происходит сведение рычагов 5 с губками 6 ,и 9 и зажим захватываемой детали соответствующими губками схва та. Так, например, при обработке ци- ,линдрических деталей типа винт, расположенных на позиции загрузки вертикально (головка вверху), захват осуществляется за головку основными губками 6, находящимися ниже дополнительных губок 9, которые в этом случае не работают. После переноса зажатой детали на рабочую позицию происходит разжим рычагов 5 под действием возвратной пружины привода 2 и освобождение детали из губок 6.
10
15
20
25
30
35
40
45
50
При обработке цилиндрических деталей с продольным расположением оси, например при обжатии шпильки с одного конца, деталь на позиции загрузки установлена горизонтально. В этом случае захват осуществляется дополнительными губками 9, которые самоустанавливаются по захватываемой детали в зависимости от ее диаметра, поворачиваясь на осях 8. При захвате губками 9 детали с погрешностью формы, например отклонением от круглости, касание губок и детали происходит в первый момент только одной стороной установочных поверхностей дополнительных губок 9. При дальнейшем сведении рычагов 5 в радиальном направлении дополнительные губки 9 смещаются в тангенциальном направлении за счет деформации пружин 7 и самоустанавливаются по детали с контактом по обеим сторонам установочных поверхностей, осуществляя надежный зажим детали. Зажатая деталь переносится на рабочую позицию и удерживается схватом во время обжатия, В процессе осадки обрабатываемой детали под нагрузкой Р (фиг.З) происходит смещение губок 9 в вертикальной плоскости за счет деформации плоских пружин 7 при плоскопараллельном перемещении установочных поверхностей губок. После снятия нагрузки губки 9 посредством упругих пружин 7 возвращаются в ис- ходное положение.
Формула изобретения
Схват промьшшенного робота, содержащий корпус с приводом и элементами крепления на механической руке, поворотные рычаги с основными губками и гузел компенсации динамических нагрузок, отличающийся тем, что, с целью расширения технологических возможностей и повьшгения надежности захвата деталей, он снабжен дополнительными подпружиненными губками, шарнирно связанными с основными , губками, каждая из которьпс соединена с соответствующим рычагом дополнительно введенными плоскими пружинами.
/ 7,
ff S
г 2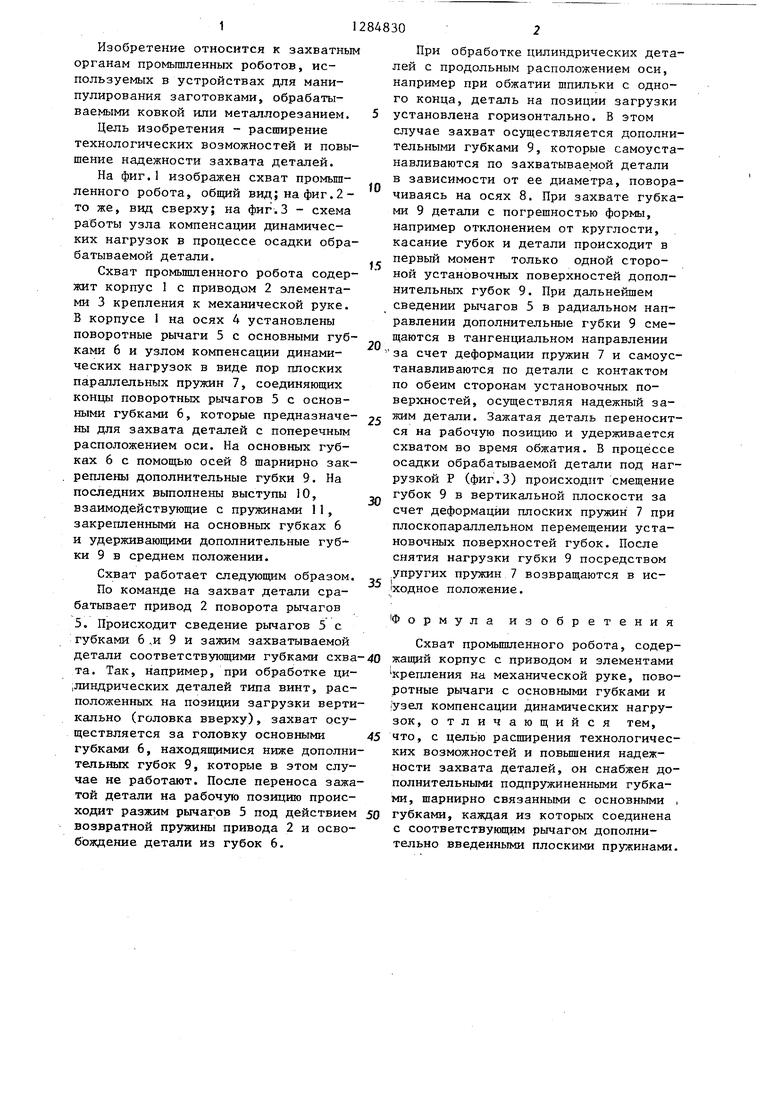
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват робота | 1983 |
|
SU1117205A1 |
| Схват робота | 1986 |
|
SU1350004A1 |
| Схват промышленного робота | 1982 |
|
SU1065187A1 |
| Схват промышленного робота | 1986 |
|
SU1328196A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2022781C1 |
| Схват | 1981 |
|
SU952581A1 |
| Схват промышленного робота | 1983 |
|
SU1177150A2 |
| Групповой схват промышленного робота | 1988 |
|
SU1535714A1 |
| Схват промышленного робота | 1980 |
|
SU931467A1 |
| Схват | 1982 |
|
SU1093543A1 |
Изобретение относится к захватным органам промышленных роботов и позволяет обеспечить без переналадки захват деталей различного диаметра с продольным и поперечным расположениями осей, компенсацию погрешностей формы захватываемой детали и ее смещение во время обработки за счет независимой плоской пружинной подвески основных губок 6 и дополнительных губок 9, шарнирно закрепленных на осях 8. Повышенная жесткость плоских пружин 7 в направлении, параллельном их широкой грани, позволяет удерживать деталь при обработке без центрирующих устройств в штампе. 3 ил. (Л ю 00 4 00 СО / / е./
Редактор И.Дербак
Составитель А.Черньшов
Техред И.ПоТпович Корректор Л.Пилипенко
Заказ 7516/19Тираж 950Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москйа, Ж-35, Раушская наб-. , д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Ф1Аг,Ъ
| Захват промышленного робота | 1979 |
|
SU844264A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
