Изобретение относитйя к машиностроению и может быть использовано в промьшш енных роботах и манипуляторах.
Цель изобретения - расширение технологических возможностей за счет определения размеров захватываемых деталей, имеющих форму тел вращения
На фиг. 1 изображен схват, общий вид; на фиг. 2 - призматическая губка схвата с деталью, разрез; на фиг. 3 - вид А на фиг. 2.
Схват содержит основание 1, рычаги 2 и 3, несущие губки, одна из которых 4 выполнена в виде пластины, а другая 5 - призматической формы, предназначенных для захвата детали 6 имеющей форму тела вращения. На губке 4 установлен электрический контакт 7, который электроизолирован от материала губки изолятором 8. К контакту 7 подсоединен провод 9. В призматической губке 5 выполнена прорезь шириной О. (фиг. 2 и 3), в которой установлена пластина 10 с размещенными в ней электрическими контактами 11-13. Последние длектроизолированы один от другого и от стенок губки изолятором 14 и к ним подсоединены прово-30 с я тем, что, с целью расширения
да 15-17. Пластина 10 зажата в прорези винтом 18 и может быть легко заменена на другую..Провода 9, 15-17 подключены к управляющему устройству 19.
Если изоляторы 8 и 14 выполнить из упругого материала, то при зажатии деталей усилие зажатия воспринимается главным образом не контактами 7, 11- 13, а поверхностями губок 4 и 5. Это уменьшает изнашиваемость контактов и обеспечивает их надежньй контакт с деталями.
Схват работает следующим образом.
При захвате, например, деталей трех разных диаметров D1, D2 и D3;контакт 11 взаимодействует с деталью D1 в точке контакта 11, контакт 12 - с деталью.D2 в точке 12, контакт 13 - с деталью D3 в точке 13. При этом контакт 7 взаимодействует со всеми деталями в одной точке. При зажатии детали, например, с диаметром D2 замыкается электрическая цепь, состоящая из провода 9, контактов 7 и 12 и провода 16. При прохождении по этой цепи электрического тока система 19 управления получает сигнал о том, что захватным устройством зажата деталь с диаметром D2.
Аналогичным образом определяются диаметры остальных деталей.
Формула изобретения
25 Схват промьшшенного робота, содержащий губки, на которых с возможностью взаимодействия с захватываемой де- талью установлены основные электрические контакты, отличающийтехнологических возможностей за счет определения размеров захватываемых деталей, имеющих форму тел вращения, он снабжен дополнительными электрическими контактами, при этом одна из губок выполнена призматической формы, а другая - в виде плоской плостины, причем один из основных электрических контактов установлен на пластине, а другой основной контакт и дополнительные контакты - на грани призмы.
19
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват промышленного робота | 1986 |
|
SU1404336A1 |
| Схват манипулятора | 1981 |
|
SU1009757A1 |
| Схват промышленного робота | 1985 |
|
SU1284830A1 |
| Схват промышленного робота | 1985 |
|
SU1305031A1 |
| Групповой схват промышленного робота | 1988 |
|
SU1535714A1 |
| Групповой схват промышленного робота | 1981 |
|
SU975389A1 |
| Схват манипулятора | 1983 |
|
SU1202864A1 |
| Схват для хрупких деталей | 1984 |
|
SU1284827A1 |
| Захватное устройство промышленного робота | 1987 |
|
SU1426783A1 |
| Схват промышленного робота | 1982 |
|
SU1065187A1 |

Изобретение относится к машиностроению и может быть использовано в промышленных роботах и манипуляторах. Целью изобретения является расширение технологических возможностей за счет определения размеров захватываемых деталей, имеющих форму тел вращения. Схват состоит из основания, рычагов, имекяцих возможность перемещаться навстречу друг другу, и закрепленных на рычагах губок, одна из кото- рь1х имеет форму пластины, а другая - призматическую форму. На пластине установлен злектрический контакт, а в призматической губке 5 установлена пластина 10 с несколькими контактами, каждый из которых контактирует с деталями определенного диаметра. В процессе захвата детали система управления, получив сигнал от того или иного контакта, определяет диаметр детали. 3 ил. (Л t8 10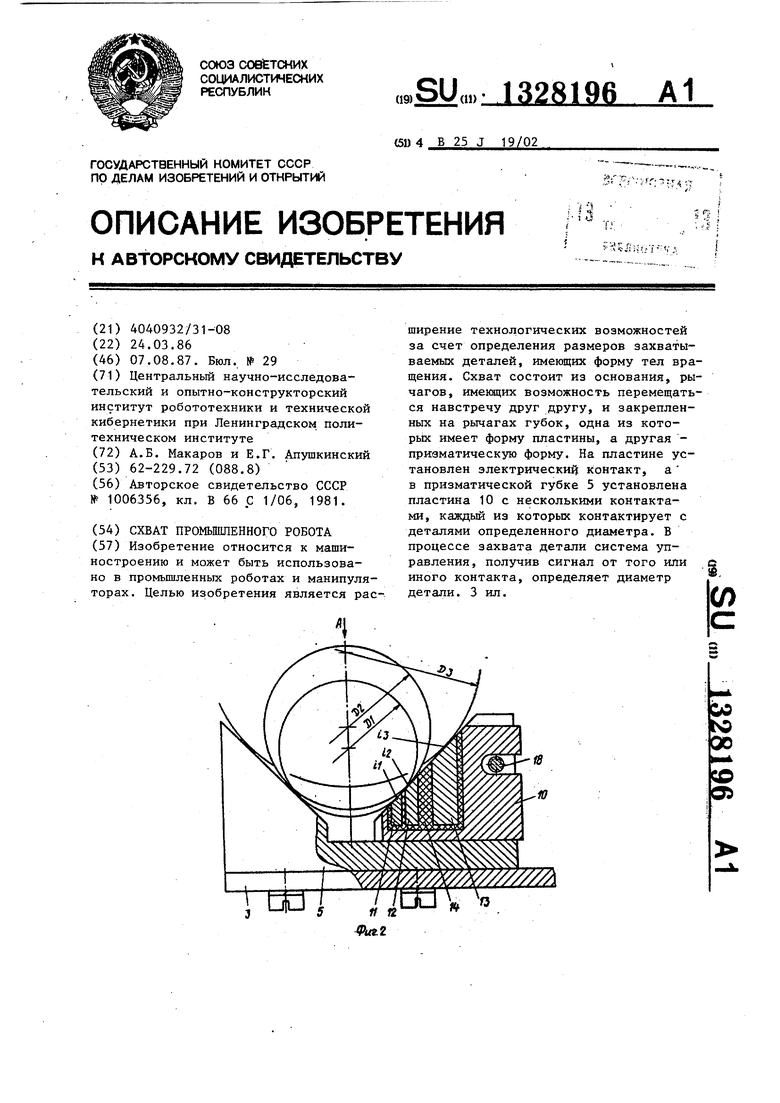
1B
fej
Редактор M. Бланар
Составитель Ф. Майоров
Техред Л.Сердюкова Корректор А. Зимокосов
Заказ 3437/20 Тирах 952 Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Грузоподъемное электромагнитное устройство | 1981 |
|
SU1006356A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
