Изобретение относится к подъемно-транспортной технике и может быть использовано в машиностроении для транспортировки, например, металлической стружки, в металлургической промышленности для транспорт- тировки скрапов и различных компонентов шихты, в химической, строительной и других областях промышленности.
Целью изобретения является повышение эффективности работы конвейера путем стабилизации прямого и обратного ходов желоба и уменьшение мошности привода.
На чертеже схематично изображен инерционный конвейер, вид спереди.
Инерционный конвейер содержит установленный на неподвижном основании 1 с возможностью возвратно-поступательного перемешения по роликам 2 желоб 3 и связанный с желобом 3 тягами 4 привод, в котором врашаюший момент передает редуктор 5 с двумя выходными валами 6. Конвейер снабжен подвижными опорами 7, каждая из которых имеет внутреннюю 8 и внешнюю 9 направляюшие поверхности. Внутренняя направляюшая поверхность 8 имеет форму специальной профильной дорожки. Каждый выходной вал 6 редуктора 5 снабжен насаженной на него вилкой 10 с роликом II, установленным с возможностью взаимодействия с внутренней направляюш,ей поверхностью 8 опоры 7 (замкнутые внутренние профильные поверхности выполнены специальными для обеспечения обкатывания
Применение инерционного конвейера предлагаемой конструкции позволяет исклюв движущихся опорах, стабилизировать требуемый закон движения желоба, обеспечить заданную производительность и существенно снизить мощность привода конвейера.
Формула изобретения
40
по ним роликов 11). Внешние направляющие 30 чить большую часть ненужных сил трения поверхности 9 опор 7 дополнительно снабжены выступами 12, через последние и через промежуточные кронштейны 13 проходит общая ось 14, обеспечивающая вращение вокруг себя и воспринимающая знакопеременные вертикальные нагрузки. Ось 14 рас- 35 положена параллельно выходному валу 6 редуктора 5. Промежуточный кронщтейн 13 одним концом, - опорной частью, неподвижно закреплен на подпружиненной опорной плите 15 для опоры 7, установленной на пружинах 16 и 17, имеющих каждая механизмы 18 и 19 регулирования усилия и хода. Причем каждая тяга 4 шарнирно соединена с соответствующей опорой 7 и с желобом 3.
Ось 14 может быть оборудована подшипниками качения для обеспечения гарантированного положения опор 7.
Инерционный конвейер работает следую- шим образом.
Вращение с выходных валов 6 редуктора 5 передается вилкам 10 с роликами 11. Ролики 11, вращаясь по концентрическим траекториям, обкатываются по специальным внутренним профильным поверхностям опор 7, выполненным с переменными текущими радиусами относительно осей вращения выходных валов 6, вилок 10 и соответственно
Инерционный конвейер, содержащий установленный на неподвижном основании с возможностью возвратно-поступательного перемещения желоб, привод с редуктором, на выходном валу которого расположена вилка с роликом, установленным с возможностью взаимодействия с внутренней поверхностью подвижной опоры, шарнир но соеди45 ненной тягой с желобом, и подпружиненная опорная плита для подвижной опоры, отличающийся тем, что, с целью повыщения эффективности работы конвейера путем стабилизации прямого и обратного ходов желоба и уменьшения мощности привода, конвейер
50 снабжен кронщтейном, который одним концом неподвижно закреплен на подпружиненной опорной плите, а другим концом соединен с подвижной опорой посредством оси, расположенной параллельно выходному валу редуктора.
ВНИИПИЗаказ 1343/17Тираж 778Подписное
Производственио-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
роликов 11, при этом эти радиусы всегда меньше радиуса врашения ролика по концентрической траектории. Возникающие переменные по величине и знаку усилия от взаимодействия врашаюш.ихся роликов 11
со специальными внутренними профильными поверхностями 8 опор 7 передаются последним, которые свободно за счет этих усилий качаются с определенными полуамплитудами прямого и обратного ходов вокруг
оси 14, причем ось 14 вместе с промежуточным кронштейном 13 и плитой 15 перемещается в вертикальной плоскости за счет усилий пружин 16 и 17. Ход этих пружин вверх и вниз одинаков, а соответственно с ними одинаков и ход опор 7, а скорость
движения разная в зависимости от профиля специальной внутренней поверхности 8 опоры 7, что и определяет динамические процессы в переходных зонах (при смене направления хода). Однако основным определяющим элементом закона движения опоры является ее внутренняя профильная поверхность. Этот закон движения передается через тягн 4 желобу 3, который двигается по роликам по закону движения катков; возвратно-поступательно с переменным ускорением и скоростью, а находящийся на нем груз совершает часть цикла движения вперед, в сторону подачи его. а часть - обратно.
Применение инерционного конвейера предлагаемой конструкции позволяет исклю
чить большую часть ненужных сил трения
в движущихся опорах, стабилизировать требуемый закон движения желоба, обеспечить заданную производительность и существенно снизить мощность привода конвейера.
чить большую часть ненужных сил трения
Формула изобретения
ую часть ненужных с
40
30 чить большую часть ненужных сил трения 35
Инерционный конвейер, содержащий установленный на неподвижном основании с возможностью возвратно-поступательного перемещения желоб, привод с редуктором, на выходном валу которого расположена вилка с роликом, установленным с возможностью взаимодействия с внутренней поверхностью подвижной опоры, шарнир но соеди45 ненной тягой с желобом, и подпружиненная опорная плита для подвижной опоры, отличающийся тем, что, с целью повыщения эффективности работы конвейера путем стабилизации прямого и обратного ходов желоба и уменьшения мощности привода, конвейер
50 снабжен кронщтейном, который одним концом неподвижно закреплен на подпружиненной опорной плите, а другим концом соединен с подвижной опорой посредством оси, расположенной параллельно выходному валу редуктора.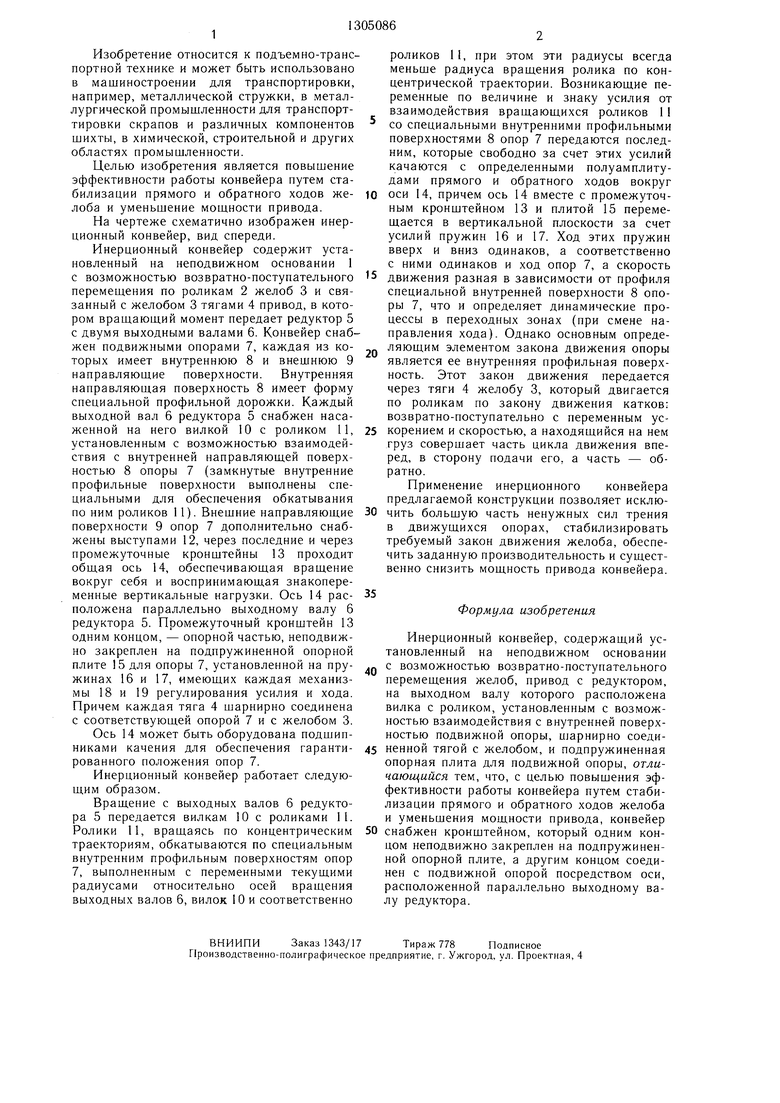
| название | год | авторы | номер документа |
|---|---|---|---|
| Инерционный конвейер | 1986 |
|
SU1351848A1 |
| Инерционный конвейер | 1986 |
|
SU1390137A1 |
| Инерционный конвейер | 1982 |
|
SU1065311A1 |
| Инерционный конвейер | 1984 |
|
SU1207920A1 |
| Инерционный конвейер | 1985 |
|
SU1276586A1 |
| Инерционный конвейер | 1987 |
|
SU1461700A1 |
| Линия для производства формового хлеба | 1980 |
|
SU938878A1 |
| УСТАНОВКА ДЛЯ МОЙКИ БОЧЕК | 1969 |
|
SU247207A1 |
| Устройство для ускоренных испытаний почвообрабатывающих рабочих органов | 1989 |
|
SU1725087A1 |
| Устройство для сверления отверстий | 1988 |
|
SU1634386A1 |
Изобретение предназначено для транспортировки, например, металлической стружки, скрапов и -различных компонентов шихты в различных отраслях пром-ти. Цель - повышение эффективности работы конвейера путем стабилизации прямого и обратного ходов желоба и уменьшение мощности привода. На неподвижном основании 1 с возможностью возвратно-поступательного перемещения по роликам (Р) 2 установлен желоб 3. Он связан тягами 4 с приводо.м, в котором вращающий момент передает редуктор 5 с двумя выходными валами 6. Каждый из них снабжен насаженной на него вилкой 10 с Р 11, установленным для взаимодействия с внутренней поверхностью 8 подвижной опоры 7. Последняя шарнирно связана тягой 4 с желобом 3. Кронштейн 13 одним концом неподвижно закреплен на подпружиненной опорной плите 15 для опоры 7, а другим концом соединен с опорой 7 посредством оси 14. Она расположена параллельно выходному валу 6 редуктора 5. Вращение с валов 6 передается вилкам 10. Врапдаясь, Р 1 1 обкатываются по внутренним профильным поверхностям опор 7. Они начинают качаться с определенными полуамплитудами прямого и обратного ходов вокруг оси 14, которая вместе с кронштейном 13 и плитой 15 перемещается. Движение передается через тяги 4 желобу 3 с грузом. 1 ил. i Ы ОО О СП О 00 о: 15 /7/
| Пластинчатый конвейер для сыпучего и крупнокускового груза | 1983 |
|
SU1154163A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Инерционный конвейер | 1982 |
|
SU1065311A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
