t1
Изобретение относится к автоматик и вычислительной технике, в частности к устройствам контроля ЭВМ, и может быть использовано при построении устройств программного и микропрограммного управления с высокой достоверностью функционирования.
Целью изобретения является упрощение устройства при .сохр анении его функциональных возможностей.
Устройство для контроля хода микропрограммы реализует аппаратно микропрограммный способ контроля, основанный на проверке правильности переходов с одного участка микропрограммы на другой при ветвлениях в микропрограмме. Кроме того, при выборке кода очередной микропрограммы задается число тактов, за которое выбранная микропрограмма выполняется При выполнении микропрограммы производится счет числа выполненных тактов (микрокоманд) и сравнение подсчитанного числа тактов с заданным после выполнения последней микрокоманды микропрограммы. Сигнал ошибки формируется, если неправильно осуществлен переход при ветвлениях в микропрограмме, если число тактов, за которое микропрограмма выполняется, превышает заданное или меньше заданного. При этом проверка правильности переходов с одного участка микропрограммы на другой при ветвлениях в микропрограмме за счет введения новой связи осуществляется путем суммирования действительного значения сигнала-условия перехода, сформированного в машине, по которому осуществлен переход, с числом тактов, за которое выбранная микропрограмма выполняется. В результате уменьшается разрядность контрольной части микрокоманд, поскольку.теперь контрольная часть микрокоманд содержит только Код поправки. Это, в свою очередь, приводит к сокращению объема памяти микропрограмм в ЭВМ и упрощает процедуру кодирования микрокоманд при составлении микропрограммы. Кроме того, уменьшается число внешних входов устройства и число
rQ рокомандой условного перехода, после выполнения которой происходит переход на выполнение микрокоманды 19, если значение сигнала условного перехода равно 1, 1-ши переход на выполлогических элементов, так как отпадает необходимость в логических эле- некие микрокомащ: ы 22, если значение
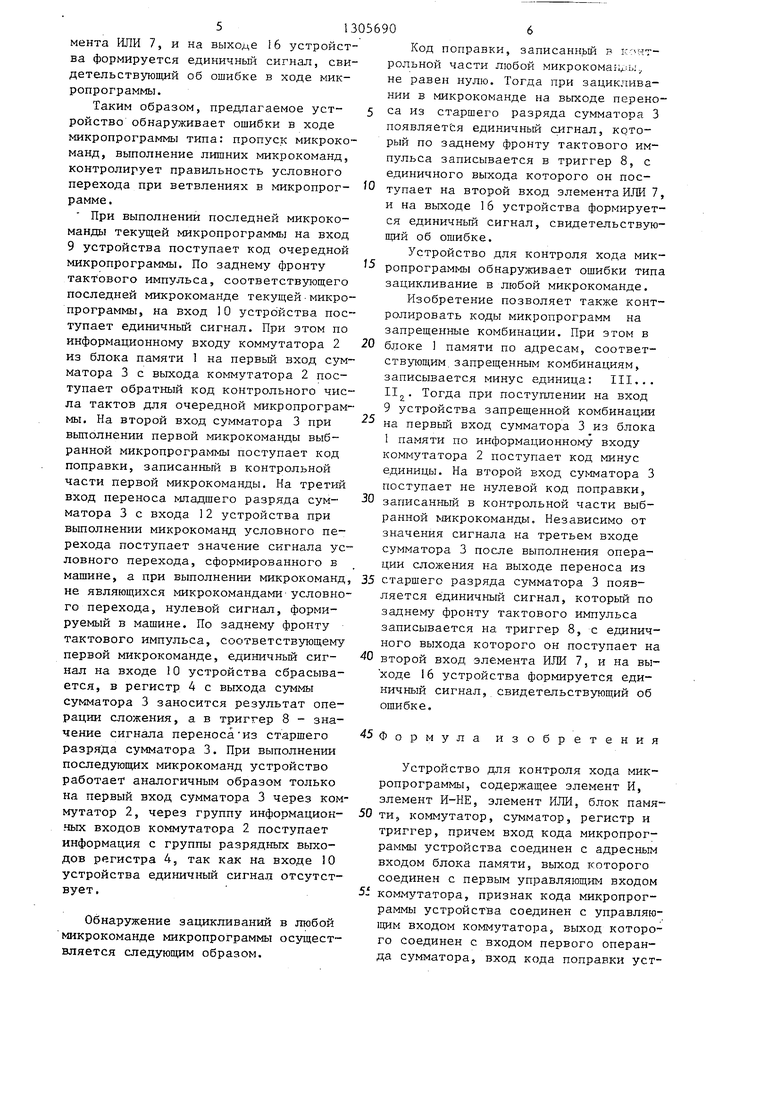
условного перехода равно О,
Каждая микрокоманда микропрограммы содержит контрольную часть, где записывается только код поправки.
ментах, осуществляющих в известном устройстве контроль правильности переходов при ветвлениях в микропрограмме .
На фиг, приведена функциональная схема устройства для контроля хода микропрограммы; на фиг.2 - структурная схема микропрограммы.
Устройство для контроля хода микропрограммы (фиг,1) содержит блок 1 памяти, коммутатор 2, сумматор 3, регистр 4, элемент И-НЕ 5, элемент И 6, элемент ЮТИ 7, триггер 8, причем вход блока I памяти соединен с входом 9 кода микропрограммы устройства, выход блока 1 памяти соединен с информационным входом коммутатора 2, группа информационных входов ко,рого соединена с группой разрядных выходов регистра 4, управляющий вход коммутатора 2 является входом 10 признака кода микропрограммы устройства. Первый, второй и третий входы
сумматора 3 соединены соответственно с выходом коммутатора 2, входом 11 кода поправки и входом 12 условного перехода устройства. Информационньй выход суммы и выход переноса сумматора 3 соединены соответственно с информационным входом регистра 4 и D- входом триггера 8, синхровход регистра 4 подключен к тактовому входу 13 устройства, группа разрядных выходов
регистра 4 соединена с группой входов элемента И-НЕ 5, R и С-входы триггера 8 подключены соответственно к входу 14 начальной установки и тактовому входу 13 устройства, выход
триггера 8 соединен с вторым входом элемента ИЛИ 7, первый вход которого соединен с выходом элемента И 6, первый и второй входы которого подключены соответственно к выходу элемента
И-НЕ 5 и к входу 15 признака конца контроля устройства, выход элемента ИЛИ 7 является выходом 16 ошибки устройства.
В микропрограмме (фиг.2) позициями 17-24 обозначены микрокоманды, причем микрокоманды 17 и 24 являются соответственно первой и последней микрокомандой, микрокоманда 18 - микрокомандой условного перехода, после выполнения которой происходит переход на выполнение микрокоманды 19, если значение сигнала условного перехода равно 1, 1-ши переход на выполнекие микрокомащ: ы 22, если значение
численное значение которого для каждой микрокоманды определяется следующим образом.
Контрольным числом тактов микропрограммы назовем максимальное число тактов, за которое может быть выполнена микропрограмма по самому дпин- ному пути, плюс значения всех сигналов-условий перехода для данного пути. Так для микропрограммы (фиг.2), 10 для пути, образованного микрокомандами 17-21, 23 и 24, с учетом единичного значения сигнала условного перехода при ветвлении из микрокоманды 18 к микрокоманде 19, контрольное число 15 хода (так, для микропрограммы, изоб- тактов равно восьми. Тогда для микро- раженной на фиг.2, этот случай соот- команд 17-21, 23 и 24 код поправки равен единице, а для микрокоманды 22- четырем. Таким образом, для любого
выхода элемента И-Е1Е 5 на первый вхо элемента И 6 поступает нулевой сигнал, на его выход е единичный сигнал отсутствует. Если при выполнении мик ропрограммь: пропущена хотя бы одна микрокоманда или после вьтолнения микрокоманды условного перехода по нулевому значению сигнала условного перехода, сформированного в машине и поступающего на вход 12 устройства, происходит ошибочная передача управления на микрокоманду, на которую переход должен произойти при единичном значении сигнала условного переветствует ошибочному переходу на микрокоманду 19 по нулевому значению сигнала условного перехода после выпути в микропрограмме суммарное зна- 20 полнения микрокоманды 18), то после чение кодов поправок и значений соответствующих сигналов условных переходов должно равняться контрольному числу тактов для данной микропрограмвыполнения последней микрокоманды микропрограммы не все выходы регистра 4 находятся в единичном состоянии, на выходе элемента И-НЕ 5 присутстмы. При этом минимальное значение ко-25 вует единичный сигнал. После выполне- дов поправок любых микрокоманд не ния последней микрокоманды микропрог- должно быть равно нулю.раммы единичный сигнал, поступающий
Контрольная часть микрокоманды содержит только код поправки, чем такна вход 15 устройства, формирует на выходе элемента И 6 также единичный
же достигается упрощение устройства для контроля хода микропрограммы по сравнению с известным устройством.
Устройство для контроля хода микропрограммы работает следующим образом.
Б исходном положении триггер 8 находится в нулевом состоянии, в которое он устанавливается в начале рабосигнал, который поступает на первый вход элемента ИЛИ 7. На выходе элемента ИЛИ 7 формируется единичный сигнал, который поступает на выход 16 устройства и свидетельствует об 35 ощибке в ходе микропрограммы. Если при выполнении микропрограммы вьтол- нена лишняя микрокоманда или после выполнения микрокоманды условного перехода по единичному значению сигты устройства по входу 14 устройства. В блоке 1 памяти по адресам, опреде- 40 нала условного перехода, сформирован- ляемым кодами микропрограмм, находят- ного в машине и поступающего на вход ся контрольные числа тактов соответ12 устройства, происходит ошибочная передача управления на микрокоманду, на которую переход должен произойти
ветствующих микропрограмм, записанные в обратном коде.
После выполнения последней микрокоманды микропрограммы на вход 15 устройства поступает единичный сигнал признака конца контроля, который открывает по второму входу элемент И 6. Если ход микропрограммы не нарушен, т.е. не пропущенй ни одна микро50 нию сигнала условного перехода после выполнения микрокоманды 18), то после вьтолнения последней микрокоманды или еще до вьтолнения последней микрокоманды микропрограммы единичный
команда, не выполнено ни одной лишней микрокоманды и правильно осуществлены условные переходы при ветвле- 55 сигнал с выхода переноса из старшего ниях в микропрограмме, то все выходы разряда сумматора 3 по заднему фрон- регистра 4 должны находиться в единичном состоянии, а единичный выход
ту тактового импульса заносится на триггер 8, с единичного выхода которого он поступает на второй вход элетриггера 8 - в нулевом состоянии. С
хода (так, для микропрограммы, изоб- раженной на фиг.2, этот случай соот-
выхода элемента И-Е1Е 5 на первый вхо элемента И 6 поступает нулевой сигнал, на его выход е единичный сигнал отсутствует. Если при выполнении мик ропрограммь: пропущена хотя бы одна микрокоманда или после вьтолнения микрокоманды условного перехода по нулевому значению сигнала условного перехода, сформированного в машине и поступающего на вход 12 устройства, происходит ошибочная передача управления на микрокоманду, на которую переход должен произойти при единичном значении сигнала условного перехода (так, для микропрограммы, изоб- раженной на фиг.2, этот случай соот-
ветствует ошибочному переходу на микрокоманду 19 по нулевому значению сигнала условного перехода после выполнения микрокоманды 18), то после
выполнения последней микрокоманды микропрограммы не все выходы регистра 4 находятся в единичном состоянии, на выходе элемента И-НЕ 5 присутстна вход 15 устройства, формирует на выходе элемента И 6 также единичный
сигнал, который поступает на первый вход элемента ИЛИ 7. На выходе элемента ИЛИ 7 формируется единичный сигнал, который поступает на выход 16 устройства и свидетельствует об ощибке в ходе микропрограммы. Если при выполнении микропрограммы вьтол- нена лишняя микрокоманда или после выполнения микрокоманды условного перехода по единичному значению сигнала условного перехода, сформирован- ного в машине и поступающего на вход
нала условного перехода, сформирован- ного в машине и поступающего на вход
12 устройства, происходит ошибочная передача управления на микрокоманду, на которую переход должен произойти
при нулевом значении сигнала условного перехода (так, для микропрограммы, изображенной на фиг.2, этот случай соответствует ошибочному переходу на микрокоманду 22 по единичному значению сигнала условного перехода после выполнения микрокоманды 18), то после вьтолнения последней микрокоманды или еще до вьтолнения последней микрокоманды микропрограммы единичный
сигнал с выхода переноса из старшего разряда сумматора 3 по заднему фрон-
сигнал с выхода переноса из старшего разряда сумматора 3 по заднему фрон-
ту тактового импульса заносится на триггер 8, с единичного выхода которого он поступает на второй вход эле1316 устройст сигнал, сви в ходе микмента ИЛИ 7, и на выходе ва формируется единичный детельствующий об ошибке ропрограммы.
Таким образом, предлагаемое устройство обнаруживает ошибки в ходе микропрограммы типа: пропуск микрокоманд, выполнение лишних микрокоманд, контролирует правильность условного перехода при ветвлениях в микропрограмме.
При выполнении последней микрокоманды текущей микропрограммы на вход 9 устройства поступает код очередной микропрограммы. По заднему фронту тактового импульса, соответствующего последней микрокоманде текущеймикропрограммы, на вход 10 устройства поступает единичный сигнал. При этом по информационному входу коммутатора 2 из блока памяти 1 на первый вход сумматора 3 с выхода коммутатора 2 поступает обратный код контрольного числа тактов для очередной микропрограммы. На второй вход сумматора 3 при выполнении первой микрокоманды выбранной микропрограммы поступает код поправки, записанный в контрольной части первой микрокоманды. На третий вход переноса младшего разряда сумматора 3 с входа 12 устройства при выполнении микрокоманд условного перехода поступает значение сигнала условного перехода, сформированного в
машине, а при выполнении микрокоманд, 35 старшего разряда сумматора 3 появне являющихся микрокомандами условного перехода, нулевой сигнал, формируемый в машине. По заднему фронту тактового импульса, соответствз/тощему первой микрокоманде, единичньй сигнал на входе 10 устройства сбрасывается, в регистр 4 с выхода суммы сумматора 3 заносится результат операции сложения, а в триггер 8 - значение сигнала переноса из старшего разряда сумматора 3. При выполнении последующих микрокоманд устройство работает аналогичным образом только на первый вход сумматора 3 через коммутатор 2, через группу информационных входов коммутатора 2 поступает информация с группы разрядных выходов регистра 4, так как на входе 10 устройства единичный сигнал отсутствует .
Обнаружение зацикливаний в любой микрокоманде микропрограммы осуществляется следующим образом.
Код поправки, записанн.ый в зсг нт- рольной части любой микрокома11 :ь;,. не равен нулю. Тогда при зацикливании в микрокоманде на выходе переноса из старшего разряда сумматора 3 появляется единичньй слгнал, который по заднему фронту тактового импульса записывается в триггер 8, с единичного выхода которого он поступает на второй вход элемента ИЛИ 7, и на выходе 16 устройства формируется единичный сигнал, свидетельствующий об ошибке.
Устройство для контроля хода мик- ропрограммы обнаруживает ошибки типа зацикливание в любой микрокоманде.
РГзобретение позволяет также контролировать коды микропрограмм на запрещенные комбинации. При этом в блоке 1 памяти по адресам, соответствующим запрещенным комбинациям, записывается минус единица: III... 11. Тогда при поступлении на вход 9 устройства запрещенной комбинации на первый вход сумматора 3 из блока 1 памяти по информационному входу коммутатора 2 поступает код минус единицы. На второй вход сумматора 3 поступает не нулевой код поправки, записанный в контрольной части выбранной микрокоманды. Независимо от значения сигнала на третьем входе сумматора 3 после выполнения операции сложения на выходе переноса из
0
5
0
ляется единичный сигнал, который по заднему фронту тактового импульса записывается на триггер 8, с единичного выхода которого он поступает на 40 второй вход элемента ИЛИ 7, и на выходе 16 устройства формируется еди- ничшзш сигнал, свидетельствующий об ошибке.
45 ф
о р мула изобретения
Устройство для контроля хода микропрограммы, содержащее элемент И, элемент И-НЕ, элемент ИЛИ, блок памяти, коммутатор, сумматор, регистр и триггер, причем вход кода микропрограммы устройства соединен с адресным входом блока памяти, выход которого соединен с первым управляющим входом
коммутатора, признак кода микропрограммы устройст ва соединен с управляющим входом коммутатора, выход которого соединен с входом первого операнда сумматора, вход кода поправки уст,713
ройства соединен с входом второго операнда сумматора, выход результата и выход переноса которого соединены с информационными входами соответственно регистра и триггера, такто- вый вход устройства соединен с тактовым входом триггера и входом запис регистра, группа разрядных выходов которого соединена с второй группой информационных входов коммутатора и с группой входов элемента И-НЕ, входы начальной установки и признака конца контроля устройства соединены
соответственно с нулевым входом триггера и первым входом элемента И, выход элемента И-НЕ и прямой выход триггера соединены соответственно с вторым входом элемента И и первым входом элемента ИЛИ, выход элемента И соединен с вторым входом элемента ИЛИ, выход которого является выходом ошибки устройства, отличающееся тем, что, с целью упрощения устройства, вход условного перехода устройства соединен с входом переноса сумматора.
Редактор Г.Гербер
Составитель И.Сигалов
Техред Н.Глущенко Корректор Н.Король
Заказ 2528
Тираж 672Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, А
Фаг.2
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля хода микропрограммы | 1984 |
|
SU1238087A1 |
| Устройство для отладки программ | 1986 |
|
SU1410038A1 |
| Микропрограммное устройство с контролем | 1984 |
|
SU1208556A1 |
| Микропрограммное устройство управления | 1986 |
|
SU1310817A1 |
| Микропрограммное устройство управления | 1988 |
|
SU1621027A1 |
| Микропрограммное устройство управления | 1984 |
|
SU1183964A1 |
| Микропрограммное устройство управления | 1983 |
|
SU1100624A1 |
| Устройство для управления восстановлением микропрограмм при сбоях | 1982 |
|
SU1056193A1 |
| Микропрограммное устройство управления с контролем | 1986 |
|
SU1305679A1 |
| Устройство микропрограммного управления | 1988 |
|
SU1649539A1 |
Изобретение относится к автоматике и вычислительной технике и может быть использовано при построении устройств программного и микропрограммного управления. Цель изобретения - упрощение устройства при сохранении его функциональных возможностей. Устройство для контроля хода микропрограммы содержит блок памяти 1, коммутатор 2, сумматор 3, регистр 4, элемент И-НЕ 5, элемент И 6, элемент ИЛИ 7, триггер 8. Устройство реализует аппаратно микропрограммный способ контроля, основанный на проверке правильности переходов с одного участка микропрограммы на другой при ветвлениях в микропрограмме. Кроме того, при выборке кода очередной микропрограммы задается число тактов, за которое выбранная микропрограмма вьтолняется. 1 ил. & (Л 16 со о СЛ CD СО . Фиг.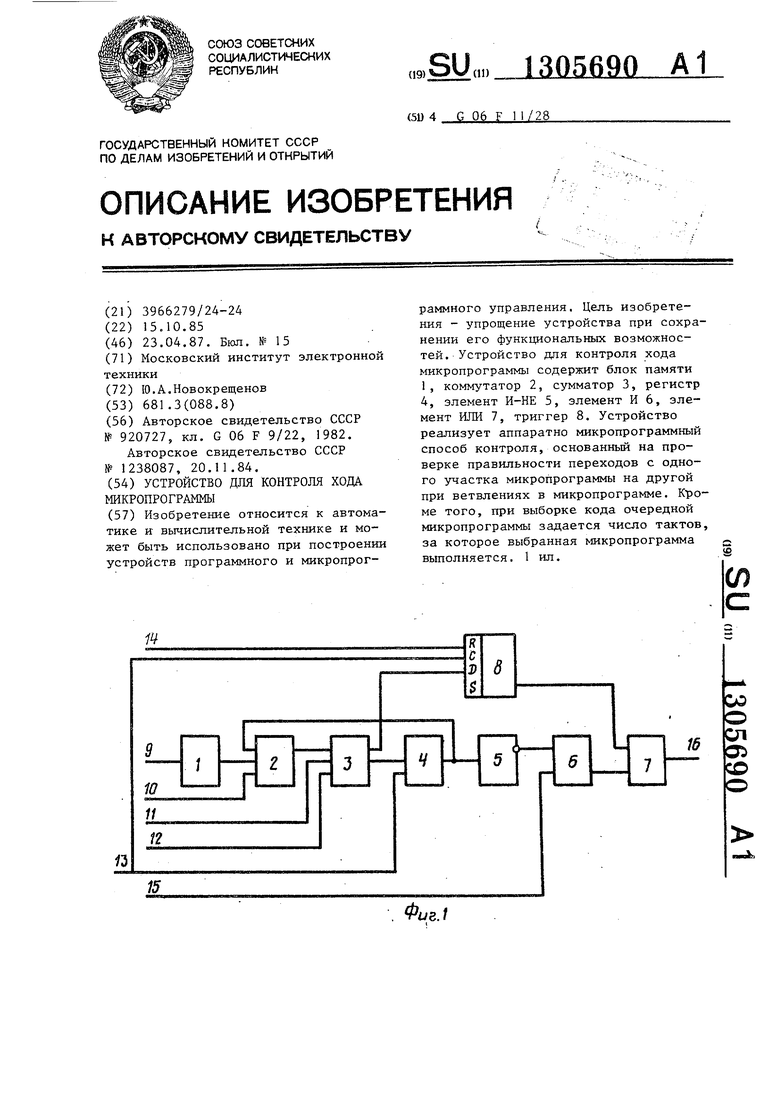
| Микропрограммное устройство управления с контролем | 1980 |
|
SU920727A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Устройство для контроля хода микропрограммы | 1984 |
|
SU1238087A1 |
