113068822
Изобретение относится к захватным ки удаляется. При снабжении.устройст- устройствам. ,ва концевыми выключателями и установЦелью изобретения является расши- ке опорного ролика в определенное по- рение эксплуатационных возможностей ложение пружинный захват работает в устройства путем расширения номен- 5 автоматическом режиме, описывая не- кЛатуры захватываемых грузов.обходимую траекторию. В зависимости
На чертеже представлен захват,об- от глубины слоя материала захват мо- щий вид. жет быть настроен на определенный
Устройство включает корпус 1, вы- режим работы пружин 3. Это достигает- полненный в виде катушки с фланцами fO ся за счет поворота кулачка 8, зак- 2, пружины 3. Пружины 3 установлены репленного на опорной раме 6 относи- между фланцами 2 с возможностью де- тельно стержня 5. При этом изменяет- формации за счет подвижных толкате- ся время наполнения пружин, а также лей 4. Корпус 1 имеет возможность момент их разгрузки над емкостью 9. вращаться относительно своей оси,ко- 5 При использовании устройства за тЬрой служит стержень 5, закреплен- счет возможности захвата и разгрузки ный в опорной раме 6. На стержень 5 вязких и сыпучих материалов в авто- установлена передача 7 от двигателя матическом режиме в десятки раз повы- перемещения, который размещен на ра- шается производительность труда опе- ме 6.-20 ратора.
Устройство снабжено механизмом деформации пружин 3, который выполнен Формула изобретения в виде кулачка 8, прикрепленного к
раме 6 с возможностью взаимодействия 1 . Захват преимущественно для мел- с толкателями 4. Кулачок 8 установ- ких грузив, содержащий корпус, соос- лен с возможность перемещения отно- ный корпусу стержень, пружинный зах- сительно стержня 5 и рамы 6.ватный орган, прикрепленный к корпуПредлагаемое устройство работает су, отличающийся тем, следующим образом.чтоу с целью расширения эксплуатаЗахват снабжается источником энер- ционных возможностей путем расшире- гии либо подключается к энергетичес- ния номенклатуры захватываемых гру- кой сети. После опускания захвата на зов, корпус представляет собой катуш- поверхность сыпучего или вязкого ма- ку, между фланцами которой закрепле- териала двигатель перемещения приво- ны пружины захватного органа, при дит через передачу 7 во вращательное 35 этом захват снабжен прикрепленными движение катушку. Последняя повора- к одним из крайних витков пружин чивается, ее пружины 3 (в данном слу- штырями, установленными с возмож- чае -пружины сжатия) погружаются в ностью перемещения в соответствую- материал и заполняются им. После вза- щем фланце катушки, профилированным имодействия с кулачком 8 толкатели 40 кулачком, установленным на стержне 4 смыкают витки пружин 3, материал с возможностью взаимодействия со поднимается по мере поворота и пере- штырями.
мещения корпуса по поверхности ма- 2, Захват по п. 1, о т л и ч а- териала Как только пружина 3 окажет- ю щ и и с я тем, что он снабжен ся над емкостью 9,кулачок 8 освобож- 45 емкостью для сбора груза, установ- дает толкатель 4 и материал высыпа- ленной с возможностью вращения меткду ется в емкость 9. После заполнения фланцами катушки, стержнем и пружи- емкости 9 материал из нее периодичес- нами.
fc ,
Составитель М.Руфова Редактор Л.Повхан Техред М.Ходанич Корректор Т.Колб
Заказ 1491/20Тираж 721Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 1-13035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул. Проектная, 4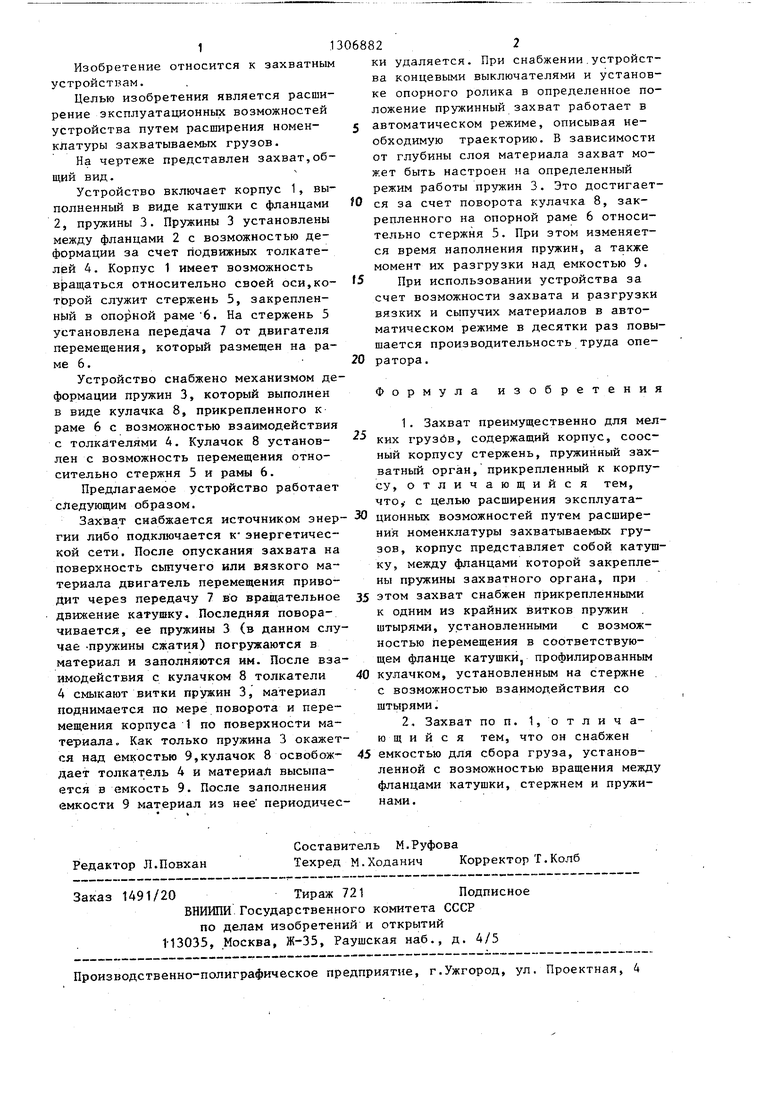
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват для сыпучих материалов | 1985 |
|
SU1306883A1 |
| Захватное устройство | 1990 |
|
SU1754617A1 |
| Многопозиционный станок для отгибки фланцев и зиговки полых деталей из листового материала | 1982 |
|
SU1044382A1 |
| Захватное устройство для грузов с грибовидной головкой | 1975 |
|
SU673589A1 |
| Захват-кантователь | 1987 |
|
SU1472411A1 |
| Цепевязальный автомат и способ вязки цепи цепевязальным автоматом | 2023 |
|
RU2827820C1 |
| Автоматические пружинные весы для сыпучих тел | 1930 |
|
SU29268A1 |
| Стыковочный захват | 1975 |
|
SU548541A1 |
| Устройство для свинчивания деталей | 1981 |
|
SU973287A1 |
| Автоматический перекладчик грузов | 1987 |
|
SU1491796A1 |
Изобретение относится к захватным устройствам. Целью изобретения является ра сширение эксплуатационных возможностей устройства путем расширения номенклатуры захватываемых грузов. Для этого корпус 1 выполнен в виде катушки с фланцами 2. Пружины 3 установлены между фланцами 2 с возможностью деформации за счет подвижных толкателей 4. Корпус 1 имеет возможность врап(аться относительно своей оси, которой служит стержень 5, закрепленный в опорной раме 6 с передачей 7 от двигателя перемещения. Механизм деформации пружин 3 выполнен в виде кулачка 8, установленного с возможностью перемещения относительно стержня 5 и рамы 6. Устройство работает следующим образом. После опускания захвата на поверхность сыпучего или вязкого материала двигатель перемещения приводит через передачу 7 во вращательное движение катушку. Катушка поворачивается, ее пружины 3 погружаются в материал и заполняются им. После взаимодействия с кулачком 8 толкатели 4 смыкают витки пружин 3, материал поднимается по мере поворота и перемещения катушки по поверхности материала . Как только пружина 3 окажется над емкостью 9, кулачок 8 освобождает толкатель 4 и материал высыпается в емкость 9. После заполнения емкости 9 материал из нее периодически удаляется. 1 ил. сл с: со о о: оо оо IND
| Пружинный захват | 1980 |
|
SU912486A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
