Изобретение относится к механизации погрузочно-разгрузочных работ и может быть использовано при загрузке машин циливдрическими заготовками.
Цель изобретения - повьпиение на- дежности фиксации груза.в захватном устройстве.
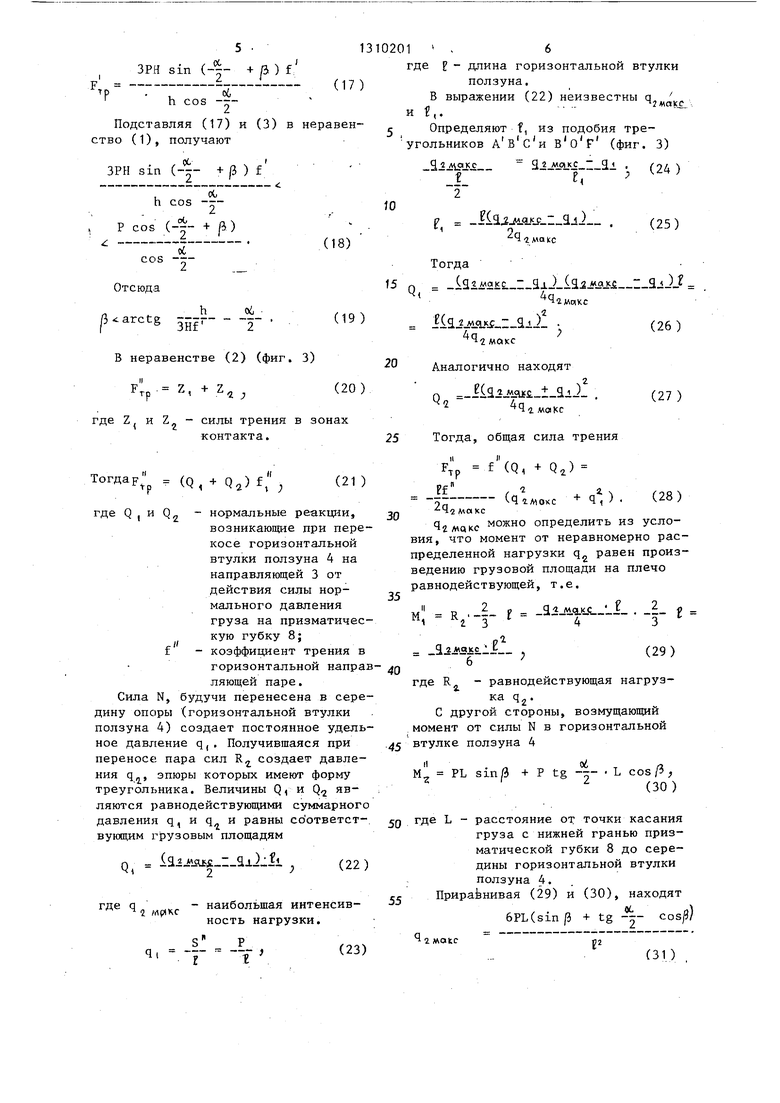
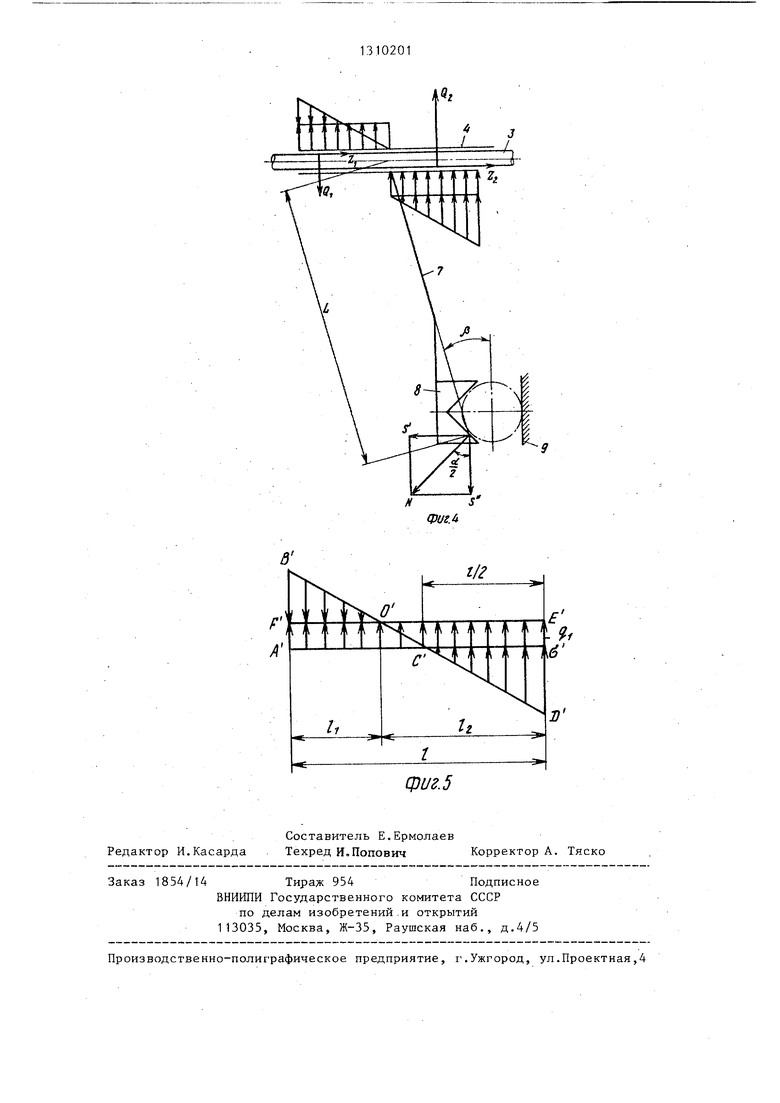
На фиг. 1 изображено захватное устройство, общий вид; на фиг,2-5 эпюры сил, действующих на элементы захватного устройства при статическом приложении силы тяжести поднимаемого груза.
Захватное устройство состоит из корпуса 1, закрепленного на нем при- вода 2 линейного перемещения, выполненного в виде цилиндра с цапфами, направляющих 3, закрепленных на корпусе и представляющих собой горизонтальные цилиндрические скалки, на которых установлен подвижный ползун 4, связанный со щтоком привода 2 ли- нейного перемещения. На ползуне жестко закреплена обойма 5, представляющая собой направляющую трубу, в ко- торой установлена подпружиненная пружиной 6 штанга 7, На штанге жестко закреплена призматическая губка 8 На корпусе жестко закреплена вертикальная плоская губка 9.
Захватное устройство работает следующим образом,
Захва.тное устройство в раскрытом состоянии подводится к заготовке до касания с плоской вертикальной губ- кой 9, При этом штанга 7 с жестко за- крепленной на ней призматической губкой 8 удерживается пружиной 6, жесткость которой выбирается минимально достаточной для удержания собствен- ного веса штанги 7 с губкой 8, Приво . 2 линейного перемещения перемещает ползун ч по направляющей 3 до упора призматической губки 8 в заготовку. Груз, воздействуя на призматические губки 8,силой собственного веса стремится выдвинуть штангу 7, проскальзывая по плоской вертикальной губке 9 и преодолевая усилие уравновешивающей пружины 6. Так как обойма 5 со штангой 7 и призматическими губками 8 наклонена к плоской губке 9 под углом |Ь , то происходит самозаклинивание груза между губками.
Работоспособность предлагаемого устройства обеспечивается соблюдением конструктивных параметров, при которых самоторможения от перекоса
штанги 7 в обойме 5 не происходит (фиг. 2), т.е.
F F 5
(1)
где F - сила, стремящаяся переместить щтангу} F - сила трения в наклонной
направляющей паре в нагруженном состоянии. Условие (1) обеспечивает подвижность штанги 7 в обойме 5, т.е. само заклйнивание груза.
Обеспечивается самоторможение от перекоса горизонтальной втулки ползуна 4 относительно направляющей 3 (фиг. 3), т.е.
1 II
тр FA.
(2)
где F - сила трения в горизонтальной направляющей паре в нагруженном состоянии; F.g - сила, стремящаяся переместить ползун 4.
Условие (2) исключает участие привода в удержании груза, а следовательно, позволяет значительно уменьшить его мощность.
В приведенных расчетах обоснован выбор основных конструктивных параметров устройства, обеспечивающих неравенство (1) и (2).
В неравенстве (1) (фиг. 2)
Ль ° ( 1 /
(Л
р
COS ( +|3 )
ОС
COS --(3)
N - сила нормального давления
груза на губку 8; Р - вес груза; oi угол призмы губки; Р - угол наклона обоймы со
штангой и призматическими губками к вертикали.
Р Т, -f Т,,.
(4)
где Т| и Tj - силы трения в зонах контакта.
F (К, + K)f
(5)
где К , и Kj - нормальные реакции,
возникающие при переТогда, общая сила трения
hf
2k
f (К, + К)
(k
гтакс
гмакс
k).
(12)
Т
k« .,,,1., можно определить из уелоTL АЛО КС
31310201
косе штанги 7 в обой- , ме 5; f - коэффициент трения в
наклонной направляющей паре.5
В дальнейших расчетах не учитыва- ются сила, необходимая на преодоле-- ния усилия пружины 6 и вес призмати- ческой губки 8 со штангой 7 из-за. неравномерно раснезначительности по сравнению с ве- Ш
сом поднимаемого груза.
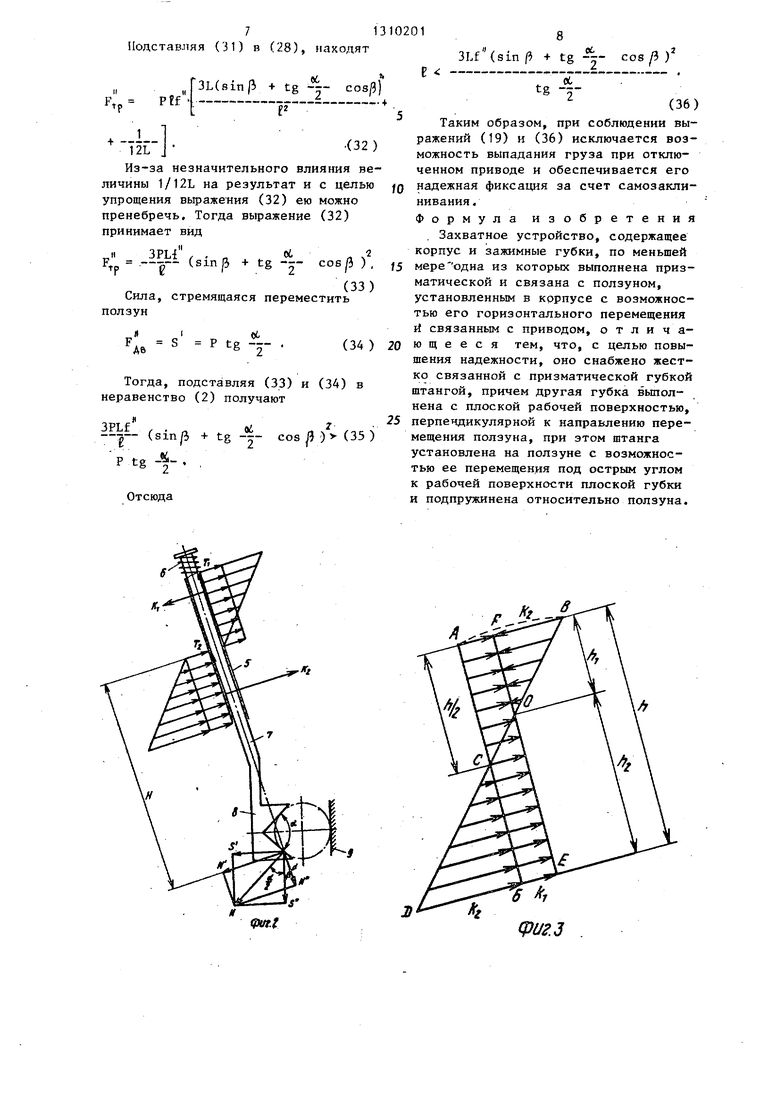
Сила N, будучи перенесена в середину опоры (обоймы 5), создает постоянное удельнЬе давление k. Получившаяся при переносе пара сил R, 5 создает удельные давления k, эпюра которых имеет форму треугольника. Величины нормальных реакций К, и К являются равнодействующими суммяр20
ного давления k и k и равны соответствующим грузовым площадям (фиг. 2)
пределенной нагрузки k равен произ.- ведению грузовой площади на плечо равнодействующей, т.е.
м; ,R, -|-h .-f-h
(13)
6
С другой стороны, возмущающий момент от силы N
ос
М,
N Н Р
sin (--- + р )
- Н, (14)
К,
( k ) hi
где k макс наибольшая интенсивность нагрузки
оь
N h
Р sin ( -|- + /i )
h cos --; (7)
где h - высота обоймы.
В вьфажении (6) неизвест и h,.. .
Определяют h из подобия
НИКОВ ABC и BOF
k
kzMOKC k макс k .,
2
h,
ь - -lli l-Ma is-I ) .
91f3
Тогда
2 макс
yir.5
i«o.J..3X.. jj
(10)
z MjiKc - k, )
4k
2MOKC
Аналогично находят
К -llib ) 4k2vo,KC
(11)
Тогда, общая сила трения
hf
2k
f (К, + К)
(k
гтакс
гмакс
k).
k« .,,,1., можно определить TL АЛО КС
неравном
пределенной нагрузки k равен произ.- ведению грузовой площади на плечо равнодействующей, т.е.
м; ,R, -|-h .-f-h
(13)
6
С другой стороны, возмущающий мо20
мент от силы N
ос
М,
N Н Р
sin (--- + р )
Hi.
cos --)
25
- Н, (14)
0
где Н - расстояние от точки касания груза с нижней гранью призматической губки до середины обоймы. Приравнивая (13) и (14), находят
6Р sin (--- + /i) Н
ймакс
h cos --(15)
Подставляя (15) в (12), находят суммарную силу трения в горизонтальт ной втулке ползуна )
F Ч
7 2
(8)
()
P sin
ho 0 cosy
45
«6
6P, sin (-J- + /5 ) ..
h cos --(16)
. :t Phf sin (-f-/)
cos -Г(ЛН h
.-L). 12H
Из-за незначительного влияния вё1личины -г-- на результат и с целью
1/п уп рЪщения ею можно пренебречь. Тогда
вьфажение (1-6) принимает вид
5
ot
ЗРЯ sin (-- + /3 ) f
,ci
h cos --(17)
Подставляя (17) и (3) в неравенство (1), получают
ot
ЗРИ sin ( + |3 ) f
h cos --- Р cos ( + /5)
oi COS --
Отсюда
я h oi . p.arctg ---г-
В неравенстве (2) (фиг, Ftp- -
где Z и Z силы трения в зонах контакта.
ТогдаF
Р
(QH Q)f;
(21)
где Q , и Q - нормальные реакции,
возникающие при перекосе горизонтальной втулки ползуна 4 на направляющей 3 от действия силы нормального давления груза на призматическую губку 8; f - коэффициент трения в
горизонтальной направляющей паре.
Сила N, будучи перенесена в середину опоры (горизонтальной втулки ползуна 4) создает постоянное удельное давление q,, Получившаяся при переносе пара сил R создает давления q, эпюры которых имеют форму треугольника. Величины Q, и Q являются равнодействующими суммарного давления q, и q, и равны со ответст- вующим грузовым площадям
п i2lJiab I aj.Jj.li , Ч(7
(22)
где q - наибольшая интенсивность нагрузки.
q. .--- -.
(23)
10201 .6
где р - длина горизонтальной втулки
ползуна,
В выражении (22) неизвестны q,, и f,, с Определяют f, из подобия тре мaкc
угольников А В С И B O F (фиг, 3)
a.
f 2
- 3j MciK|21 . (24 )
Р,
illl,2J4flJlF Z SjJ
МО КС
(25)
Тогда
isiMoiK..J ia5jsi3j jii 3 JJ
З гмикс
H9.J KSLKf I ijlJ (26 )
4q,
Q.
i i макс Аналогично находят
2
п (..О 2 Чам«кс
Тогда, общая сила трения
(27)
тр
f (Q, + Q)
0
5
Pf
2q
(q
гмокс
2 макс
-q,)
(28)
г макс
можно определить из условия, что момент от неравномерно распределенной нагрузки q равен произведению грузовой площади на плечо равнодействующей, т,е.
м; R,-|.. t .--L. -|- f
.11
(29)
40
где R - равнодействующая нагрузка q.
С другой стороны, возмущающий момент от силы N в горизонтальной втулке ползуна 4
м PL sin/3 + Р tg --- L cos/3 (30)
где L - расстояние от точки касания груза с нижней гранью призматической губки 8 до середины горизонтальной втулки ползуна 4.
Приравнивая (29) и (30), находят
6PL(sinf3 + tg - cos)
.в, ,-,- --Р. --«--.-..- - - - - ------ г
2МС1|;Ср2
(31)
71310201
Подставляя (31) в (28), находят
Ч
Pff
об
Е
3L(8in/5 + tg - COS/)
tg 2
(36)
Tzf J
(32)
Из-за незначительного влияния величины 1/12L на результат и с целью упрощения выражения (32) ею можно пренебречь. Тогда выражение (32) принимает вид
( cos/3)
(33) Сила, стремящаяся переместить
ползун
« I с А, S Р tg --Тогда, подставляя (33) и (34) в неравенство (2) получают
---- (sin/5 + tg - cos/) (35)
fO
15
Р tg
«i2Отсюда
Таким образом, при соблюдении выражений (19) и (36) исключается возможность выпадания груза при отключенном приводе и обеспечивается его надежная фиксация за счет самозаклинивания . Формула изобретения
Захватное устройство, содержащее корпус и зажимные губки, по меньшей из которых выполнена призматической и связана с ползуном, установленным в кррпусе с возможностью его горизонтального перемещения и связанным с приводом, о т л и ч а- (34) 20 ющееся тем, что, с целью повышения надежности, оно снабжено жестко связанной с призматической губкой штангой, причем другая губка вьшол- нена с плоской рабочей поверхностью, перпендикулярной к направлению перемещения ползуна, при этом штанга установлена на ползуне с возможностью ее перемещения под острым углом к рабочей поверхности плоской губки и подпружинена относительно ползуна.
25
3Lf(sin /3 + tg ™ COS/ )
tg 2
(36)
| название | год | авторы | номер документа |
|---|---|---|---|
| МОСТОВОЙ КРАН | 1971 |
|
SU431093A1 |
| Вертикальный механический пресс | 1988 |
|
SU1636250A1 |
| Грузозахватное устройство | 1986 |
|
SU1341142A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЖЕСТКОСТИ ТЕКСТИЛЬНОЙ НИТИ ПРИ ИЗГИБЕ | 2013 |
|
RU2535133C1 |
| Весовое приспособление к подъемным машинам | 1926 |
|
SU6451A1 |
| Учебный прибор по физике | 1983 |
|
SU1119060A1 |
| Устройство захватное | 1985 |
|
SU1278209A1 |
| Вертикальный кривошипный пресс-автомат | 1984 |
|
SU1180275A1 |
| Устройство для уплотнения грунта | 1988 |
|
SU1700140A1 |
| Канатный зажим | 1935 |
|
SU48458A1 |
Изобретение относится к области машиностроения, в частности к погрузочным и разгрузочным работам, и решает задачу повьшения надежности захвата груза и последующего его удержания без использования привода,чго позволяет значительно снизить мощность привода захвата. Захватное устройство содержит.корпус с направ- лянлцими, привод линейного перемещения и зажимные губки, одна из которых подвижная. Подвижная зажимная губка 8 устанавливается под острым углом к рабочей поверхности неподвижной губки 9 и ее масса уравновешивается пружиной 6. Под действием груза штанга 7 заклинивается в обойме 5, которая, в свою очередь, будучи установленной на ползуне 4, передает усилие отвеса на последний. Ползун 4 заклинивается на направляющих скалках 3. Тем самьш отпадает необходимость в использовании привода в момент удержания груза. 5 ил. J г со О ю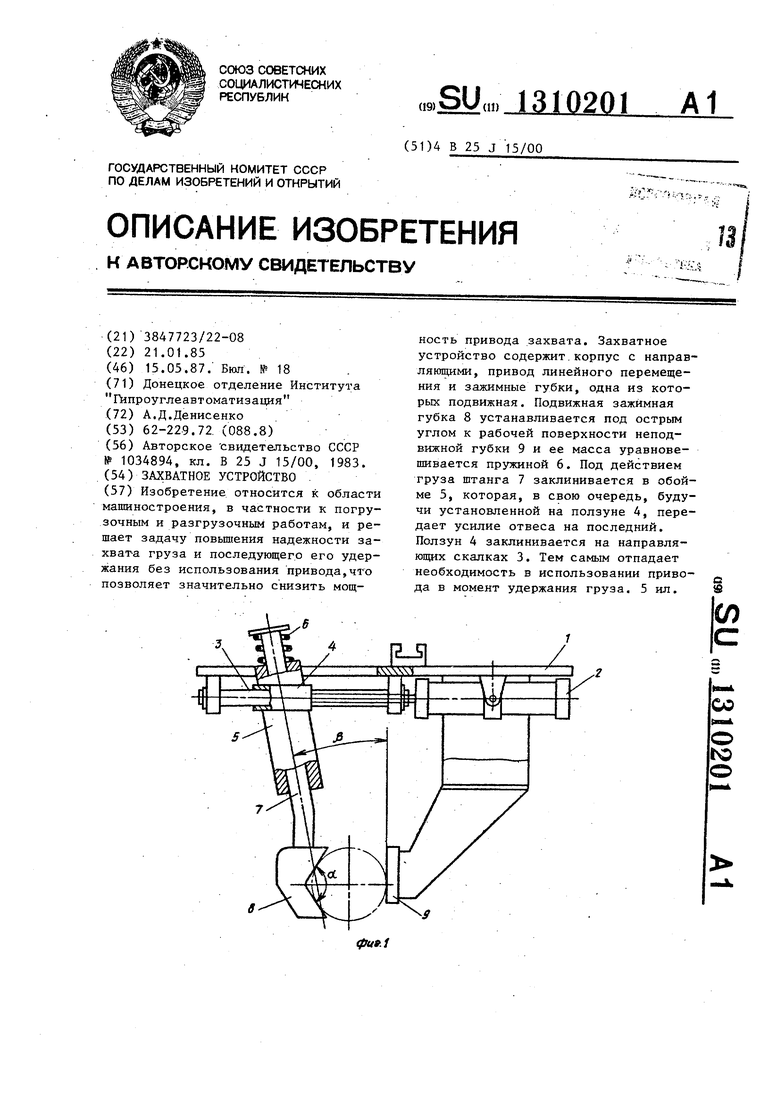
iw.t
д
1/2
.Л
1 и ч
А
k № А у
М;
I i 6
//
Редактор И.Касарда
Составитель Е.Ермолаев
Техред И.Попович Корректор А. Тяско
Заказ 1854/14 Тирад 954Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений.и открытий 113035, Москва, Ж-35, Раушская наб., д,4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная,4
2
л
фиг. 5
| Схват манипулятора | 1982 |
|
SU1034894A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
