11
Изобретение относится к обработке металлов давлением, в частности к обслуживанию кузнечно-прессовых роботизированных комплексов, и может найти применение в условиях г ибког о автоматизированного производства.
Цель изобретения - .расширение технологических возможностей путем обеспечения ацтоматизированной переналадки устройства.
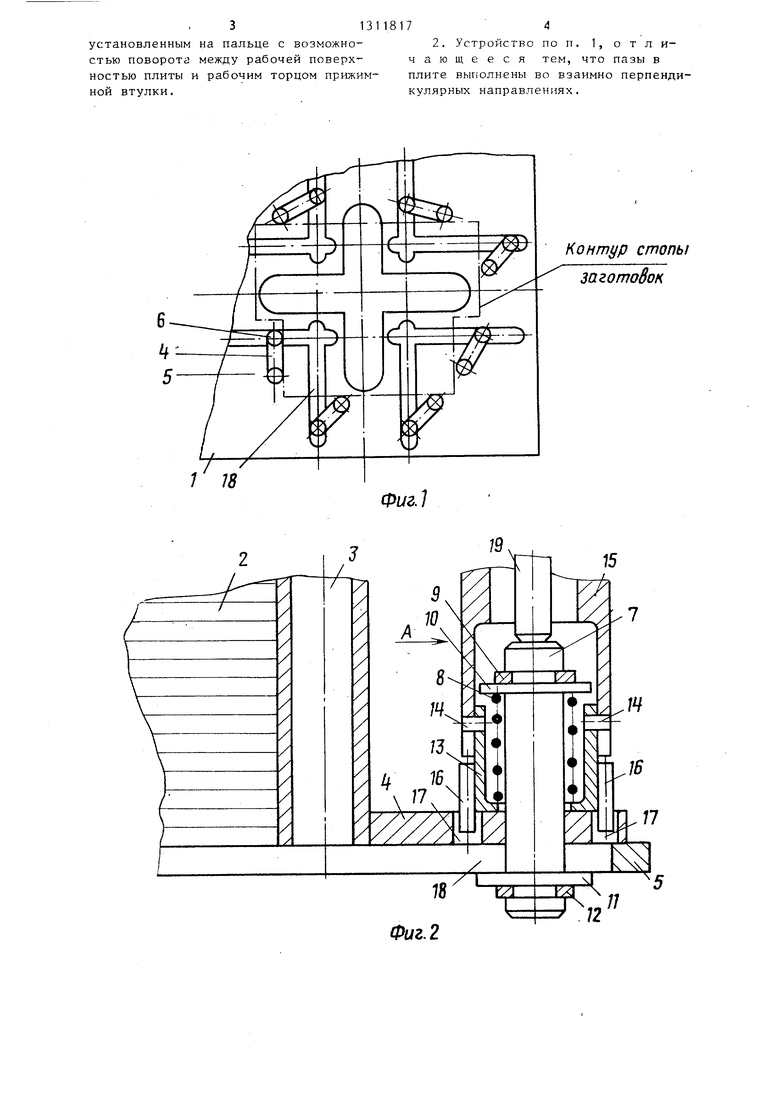
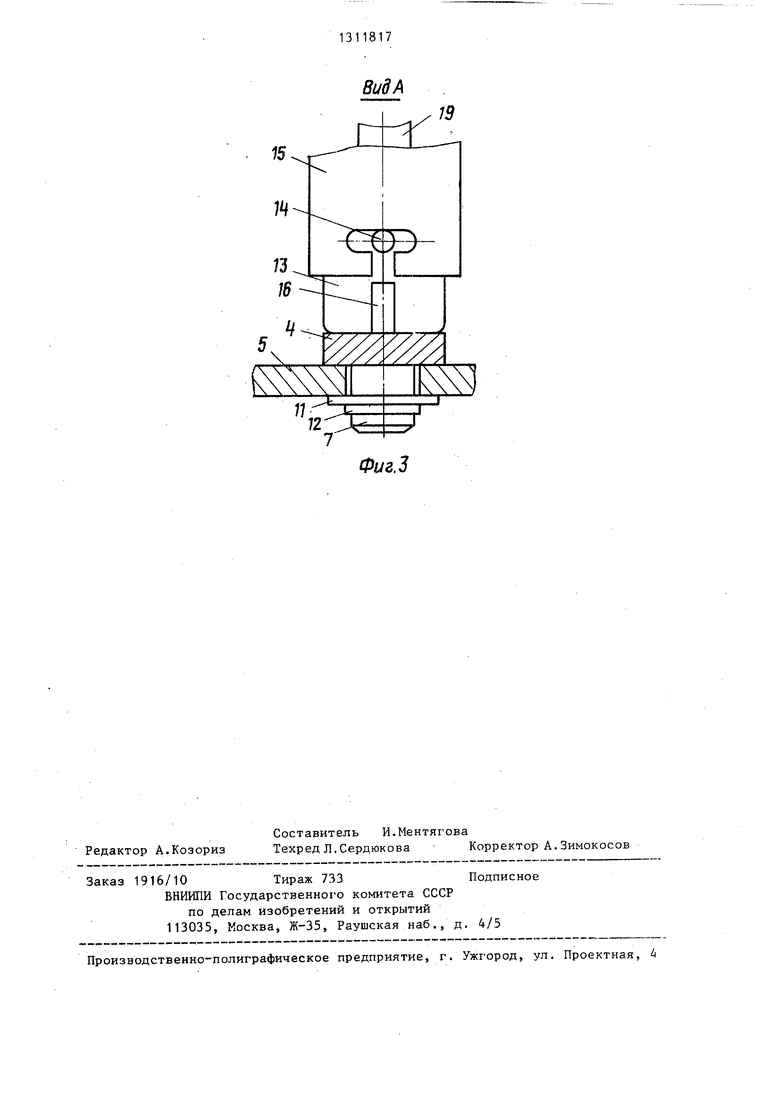
На фиг. 1 показано устройство со стойками, установленными по конфигурации стапелируемой загютовки вид сверху; на фиг. 2 - стойка с пружинным фиксатором; на фиг-. 3 - вид А на фиг. 2.
Устройство содержит кассету 1 со стопками заготовок 2, которые по контуру ограничены несколькими стойками 3. Последние через основание 4 удерживаются на плите 5 кассеты 1 подпружиненными фиксаторами 6. Каждый фиксатор выполнен в виде пальца 7 с установленными на нем пружиной 8 и шайбами 9 - 12.На пульте установлена прижимная втулка 13,снабженная ловителями в виде штырей 14 для фиксации обоймы 1.5 захватного органа робота. Рабочая поверхность втулки имеет выступы 16, введенные в отверстия 17 оснований 4.
Б плите 5 кассеты выполнены пазы 18 по диаметру пальцев 7 фиксаторов 6. Пазы расположены попарно так, что каждый из двух соседних пазов 18 па- реллелен одному и перпендикулярен к другому. Захватный орган робота снабжен толкателем 19.
Устройство работает следующим образом.
При автоматической переналадке положение- стоек 3 кассеты 1 определяется программойJзадаваемой с пульта управления роботом. При этом перемещение стоек 3 в заданное положение осуществляется обоймой захватного органа 15 робота. Последовательност его работы осуществляется по следующей программе.. Обоймы 15 захватного органа перемещаются и опускаются на прижимную втулку 13 до упора в ловители 14, затем производится фиксация по штырям 14 за счет поворота обоймы 15 на некоторый угол. Толкатель 19 захватного органа воздействует на палец 7, после чего обойма поднимает прижимную втулку 13 на некоторую высоту, меньшую длины выступов 16, затем производят пере72
мещение захватным органом робота стойки 3 вдоль паза 18 в заданную точку и разворот стойки 3 вокруг оси пальца 7 на требуемый уго.п. таким образом, чтобы стойка 3 заняла
требуемое положение на плите, ограничивая контур стопы заготовок.
Как только обойма 15 опустит кольцо 11 в нижнее положение, обес
печится автоматическая фиксация основания 4 стойки 3 относительно паза 18.
Изобретение позволяет автоматически переналаживать кассеты захват- ным органом робота с обеспечением последующей фиксации стоек..
Формула изобретения 1. Устройство для кассетирования
0 заготовок в роботизированном комплексе, содержащее смонтированную на основании, имеющую пазы плиту с рабочей поверхностью, стойки установленные на плите перпендикулярно к рабочей поверхности плиты и параллельно друг к друг у с возможностью возвратно-поступательного наладочного перемещения вдоль пазов, и фиксаторы по числу приемных стоек.о т0 л и ч а ю щ е е с я тем, что, с целью расширения технологических возможностей путем обеспечения автоматизированной переналадки, оно снабжено захват- нът органом, вьшолненным в виде уста5 новленных с возможностью встречног о возвратно-поступательного перемещения в направлении, параллельном оси стоек, толкателя, и соосной толкателю, имеющей фигурный паз на боковой стороне
0 обоймы, установленной с возможностью поворота в плоскости, параллельной рабочей поверхности, плиты, каждый фиксатор выполнен в виде установлен- ног о в пазу плиты с возможностью
5 взаимодействия с толкателем и возвратно-поступательных перемещений вдоль паза плиты и в направлении, параллельном стойкам, пальца и подпружиненной относительно пальца,ус0 тановленной на пальце с возможностью взаимодействия с обоймой и возврат- но-поступательног О перемещения и поворота прижимной втулки, имеющей расположенный параллельно рабочей
5 поверхности плиты рабочий торец с выступами и ловитель под фигурный паз обоймы, при этом каждая стойка снабжена имеющим отверстия под выступы рабочего торца основанием.
313118174
установленным на пальце с возможно- 2. Устройство по п. 1, о т л и- стью поворота между рабочей поверх- чающееся тем, что пазы в ностью плиты и рабочим торцом прижим- плите Быг1олнены во взаимно перпенди- ной втулки.кулярных направлениях.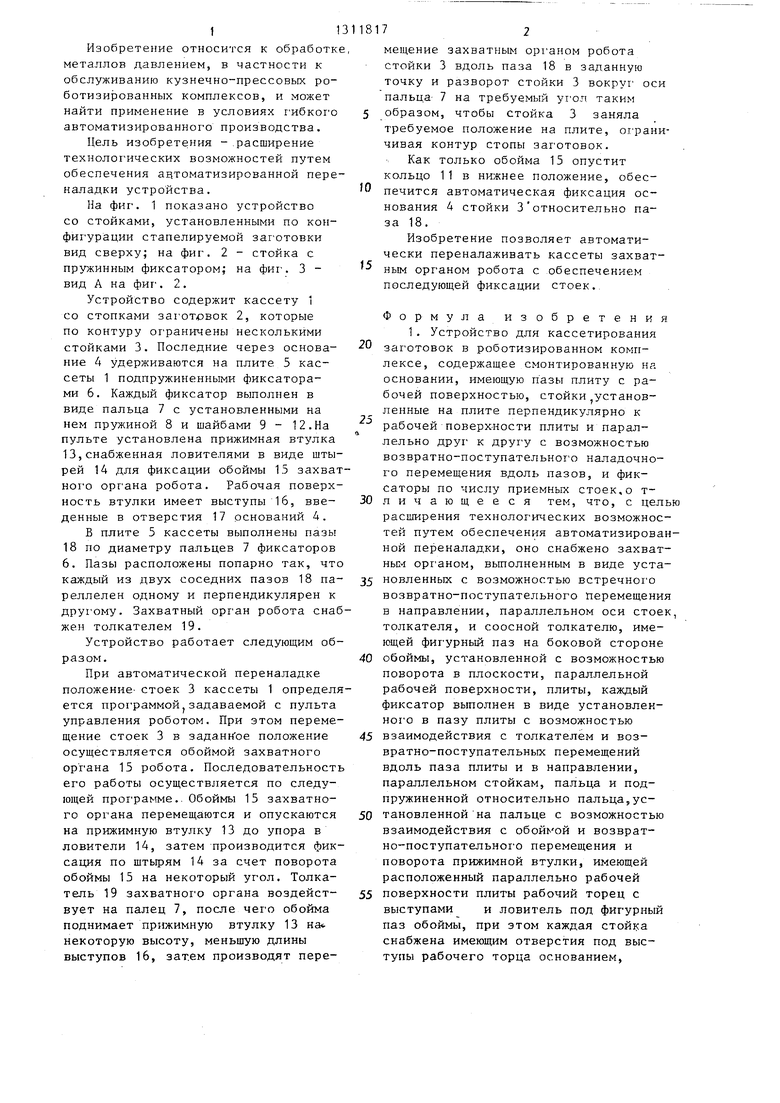
| название | год | авторы | номер документа |
|---|---|---|---|
| Поворотный стол для подачи кассет с деталями к роботу | 1989 |
|
SU1792775A1 |
| РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ МНОГОПЕРЕХОДНОЙ ШТАМПОВКИ | 1993 |
|
RU2082527C1 |
| Устройство для поштучной выдачи заготовок | 1986 |
|
SU1324728A1 |
| Устройство для поштучной выдачи заготовок | 1987 |
|
SU1456271A1 |
| Автоматическая линия для многопозиционной листовой штамповки | 1986 |
|
SU1470398A1 |
| Устройство для подачи заготовок | 1987 |
|
SU1648729A1 |
| Автоматизированный комплекс для листовой штамповки заготовок с внутренним асимметричным контуром | 1984 |
|
SU1253699A1 |
| Магазин деталей | 1983 |
|
SU1135600A1 |
| Автоматизированный комплекс для штамповки листовых заготовок | 1982 |
|
SU1061896A1 |
| Устройство для подачи заготовок | 1984 |
|
SU1273229A1 |
Изобретение относится к обработке металлов давлением, в частности к обслуживанию кузнечно-прессо- вых роботизированных комплексов, и может найти применение в условиях гибког о автоматизированного производства. Целью изобретения является расширение технологических возможностей за счет обеспечения автоматизированной переналадки устройства.Устройство содержит кассету с уложен- ньЕми на них стопками заготовок, которые по контуру ограничены несколькими стойками. Переналадка положения стоек на кассете осуществляется по программе, задаваемой с пульта управления. Перемещение стоек осуществляют захватным элементом. 1 з.п. ф-лы, 3 ил. (С 00
Контур стопы заготовок
Фиг.1
Фиг. 2
-&ЗЭ
п Редактор А.Козориз
Составитель И.Ментягова
Техред Л, Сердюкова Корректор А. Зимокосов
Заказ 1916/10 Тираж 733Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная,
ВидА
, ГY
Фиг.З
| Средства механизации и автоматизации кузнечно-штамповочного производства | |||
| Каталог ВКИИИТЭИМР, М., 1984, с | |||
| Облицовка комнатных печей | 1918 |
|
SU100A1 |
