Нзобретепие относится к области обработки металлов давлением, может быть использовано для .вьщачи штучных заготовок из магазина и подачи их в рабочую зону пресса.
Цель - повышение надежности путем стабилизации усилия давления стопы заготов.ок на захватньй орган промьш - ленного робота.
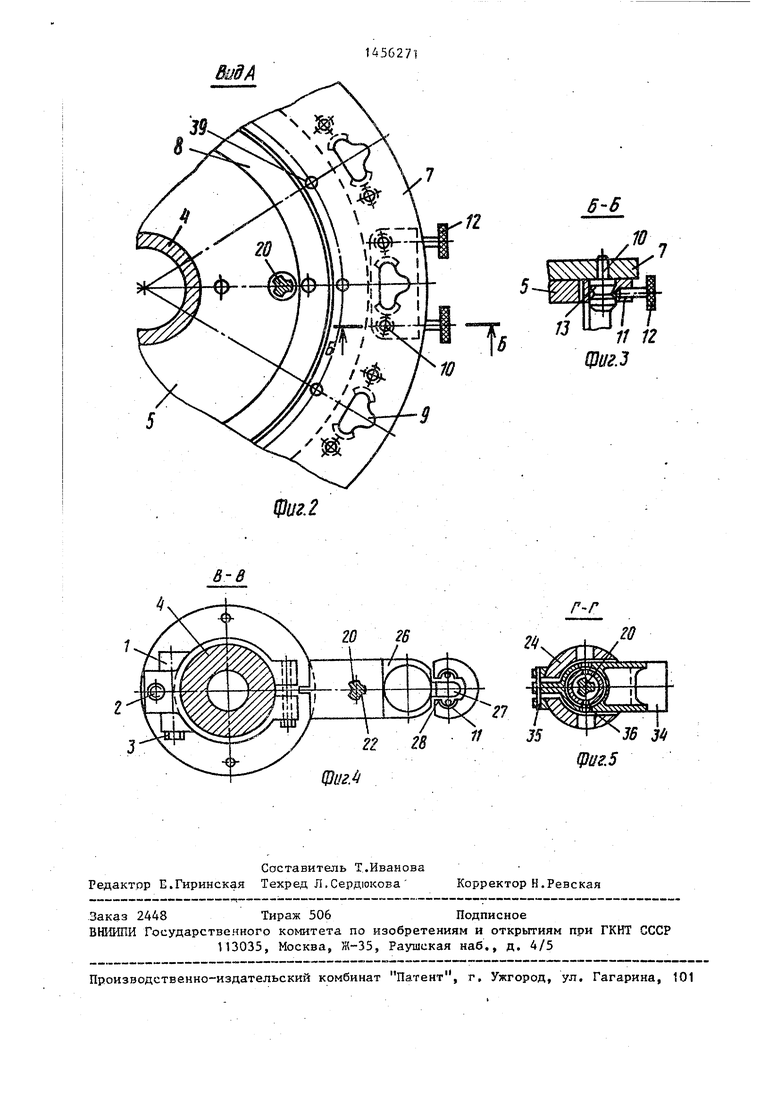
На фиг.1 изображено устройство для поштучной выдачи заготовок в разрезе, на фиг.2 - вид по стрелке А на фиг.1; на фиг.З - разрез по Б-Б на фиг.2,- на
фиг.4 - разр ез по В-В на фиг.1 на фиг.З - разрез по Г-Г на фиг.1.
Устройство содержит установленную в отверстии станины 1 с возможностью вертикального перемещения регулировочным винтом 2 и фиксации в нужном положении захсимным элементом 3 пустотелую стойку 4.
Полость стойки 4 выполнена ступенчатой. На длине каждой из ступеней внутренний диаметр полости стойки 4 имеет постоянную величину. Наибольший внутренний диаметр имеет верхняя сту
СП
35 Ю
ы
N)
10
15
20
25
ень, а кахщая из расположеннык ниже тупеней имеет меньший внутренний. : иаметр, чем предьщущая, расположеная вьпне.
Па стойке 4 неподвижно установлен порный диск 5 таким образом, что ентры стойки и диска совмещены.
На периферии опорного диска 5 выолнена проточка 6, на которой размеено с возможностью поворота вокруг ентра стойки 4 и фиксации в рабочих озициях поворотное кольцо 7. На ерхней поверхности опорного диска 5 концентрично кольцу 7 неподвижно установлено ограничительное кольцо 8. На поворотном кольце 7 на равных расстояниях друг от друга выполнено несколько очковых отверстий 9, по обе стороны которых в теле поворотного кольца 7 запрессованы хвостовики штифтов 10, предназначенных для закрепления на нижней поверхности поворотного кольца 7 кассет 11, винты 12 которых своими заостренными концами входят в проточки 13, выполненные на периферии итифтов 10.
Внутреннее сечение кассет 11, также как и очковых отверстий 9, вьшол- иено по форме отдельных участков кон- ЗО тура заготовок 14 с условием обеспе- чения надежного ориентирования по- :следних. Контур нижнего конца кассет и вьшолнен с буртом 15, имеющим минимальную ширину, достаточную для 35 удержания в кассетах стопок заготовок 14.
На верхнем конце пустотелой стоики 4 жестко закреплен кронштейн 16, а на последнем - обойма 17 управляе- дО мого шарикового замка 18, вьшолненно- го по принципу обгонной шариковой муфты. В отверстии обоймы 17 с возможностью свободного вертикального перемещения размещен сепаратор 19, а 45 в отверстии последнего - шток 20, имеющий возможность свободного вертикального перемещения и фиксации в рабочей позиции шариками 21, располо- женными в радиальных отверстиях, вы- Q полненных в. корпусе сепаратора 19.. Для лучшего сцепления шариков 21 со штоком 20, а также для обеспечения вертикального перемещения последнего без разворота, вдоль образующей ци- линдрической поверхности штока 20 выполнены по числу шариков канавки 2 с профилем, радиус которого соответствует радиусу сферической поверхности
ша от ти 23 чи св ди
ви
см су но в по ка н
-в
0
15
20
25
ЗО35
шариков 21. Сепаратор 19 подпружинен относительно обоймы 17 пружиной сжатия 23. Для передачи усилия пружины 23 обойме 17 и для регулировки величины этого усилия применен стакан 24, связанньй с обоймой 17 резьбовым соединением, контрящемся после сборки
винтом 25.
Па нижнем конце штока 20 консольно смонтирована подъемная вилка 26, несущая толкатель 27, имеющий возможность перемещения внутри кассеты 11, в которой для возможности прохождения подъемной вилки 26 выполнена вертикальная прорезь 28 (фиг.4). Для свободного прохода штока 20 через опорный диск 5 в последнем выполнено отверстие 29.
Усилие толкателю 27 для непосредственного воздействия на стопу прда- -ваемых заготовок 14 сообщается грузом .30, связанным гибким элементом 31 с подъемной вилкой 26.
Груз 30 состоит из нескольких частей. Массы всех частей груза,кроме нижней, равны между собой.
Суммарная масса груза может быть вырахсена зависимостью: .
.
m
(п - 1) + m
п
(1)
та. - масса каждой из частей, кро- ме нижней, i 1,2,3...(п-1)
п - количество частей груза, га - масса нижней части груза. Масса нижней части груза определяя по формуле:
+ MT- + , (2)
е И - масса толкателя в сумме с массой штока и подъемной
вилки;
i; добавочная масса для преодо- ления сил трения.
Суммарная масса груза определяется кже по формуле:
т„ т.;
М.
М,+
М
(3)
в где М - масса стопы заготовок
сете.
Приравнивая (1) и (3),находим личество частей груза:
ш;(п - 1) + IT.; - М, - М Мз
М, + m
«Д (п - 1)
+ m ; Mj
га.- n М 3
--Ef(4,
Величина m выбирается меньшей предельно допустимого усилия на зах- ватньш орган ПР, которое, в свою очередь, определяется исходя из грузоподъемности последнего.
Например, для робота МП-9С Т71. 330.017, грузоподъемность которого 0,2 кг, указанное усилие составит 0,2 кг.
Масса из частей, кроме нижней, будет равна:
mj 0,2 кг.
Масса стопы заготовок: Мз 0,8кг. Количество частей груза будет равно:
n -9гЁ. 0,2
4.
Масса толкателя в сумме с массой штока и подъемной вилки:
М 0,75 кг.
Добавочная масса для преодоления силы трения определяется зксперимен- тально и в нашем случае равна: М 0,5 кг.Масса нижней части груза, таким образом, равна:
га- 0,2 + 0,75 + 0,5 1,45 .кг Суммарная масса груза равна: М 0,2.3 + 1,45 2,05 кг
Количество ступеней в полости стойки 4 равно количеству частей груза 30.
I
Наружные диаметры частей груза 30 выбраны таким образом, что каждая из них имеет возможность перемещаться в пределах.соответствующей ступени и вьпае, а дальнейшее ее продвижение - вниз преграждается выступом следующей расположенной ниже ступени. То есть, наибольший наружньй диаметр имеет верхняя часть груза, а каждая из расположенных ниже частей имеет меньшйг наружный диаметр, чем предьдущая, расположенная выше.
Все части груза 30 соединены между собой посредством гибкого элемента 31, проходящего через отверстия, расположенные по центру каждой из частей.
- е. 15
20
14562716
Гибкий элемент 31 переброшен через ролик 32, установленный вместе со своей скобой 33 на кронштейне 16. Управление работой шарикового замка 18 осу1 1ествляется рычагом 34, шар- нирно связанным одной опорой с осью 35, неподвижно установленной в приливе стакана 24, а второй опорой - че- ,0 рез установленные на нем полуоси 36 с сепаратором 19. Правый конец рычага 34 имеет возможность контактирования с рукой робота 37.
Фиксация в рабочей позиции кассет 11 осуществляется установленным на опорном диске 5 и подпружиненным относительно последнего фиксатором 38, взаимодействующим с одним из нескольких отверстий 39, выполненных в поворотном кольце 7 против каждого очкового отверстия 9. Управление работой фиксатора 38 осуществляется педалью 40, связанной с ним гибким элементом 41.
25 Исходное положение подъемной вилки 26 - ниже нижнего торца кассет 11, так что она не препятствует в этом положении повороту последних. Присоска 42 схвата руки робота 37 находится 30 рабочей позиции взятия заготовки 14 из кассеты и передачи ее в штамп пресса (не показан). Присоска 42 является захватным органом.
Устройство работает следующим образом. i
Перед началом работы загр ткают стопками заготовок 14 кассеты 11. Управляя педалью 40, фиксируют с помо- щью фиксатора 38 в рабочей позиции одну из кассет 11, после чего в нижнюю часть последней вводят толкатель 27, управляя шариковым замком 18 воздействием на рычаг 34 и одновременно удерживая стопу заготовок 14 в поло- 45 жении, чтобы верхняя заготовка быпа утоплена относительно верхней поверхности поворотного кольца 7 на 2. ..3 мм. Отпускают рычаг 34 и под воздействием пружины 23 шарики 21 заклинивают 50 в таком положении шток 20.
При вводе в верхнюю часть кассеты 11 присоски 42 схвата руки робота 37 под ее воздействием рычаг 34 вместе с сепаратором 19 опустятся, расклинив 55 шарики 21 и освобождая шток 20, кото- рьп1 под воздействием груза 30 поднимет стопу заготовок 14 и прижмет ее к присоске 42 схвата руки робота 37. В этот момент в присоске 42 создает35
40
ся вакуум и верхняя заготовка прнса- сывается к ее нижней плоскости.
При отводе руки робота 37 шарики 21 под действием пружины 23 вновь за- клинивают шток 20.
Таким образом, по мере уменьшения количества заготовок в кассете уровень их остается постоянным.
Кроме того, по мере уменьшения ко- личества заготовок в кассете 11 груз |30 перемещается в полости стойки 4 вниз. Когда груз 30 пройдет первую ступень полости, его верхняя часть отделится от остальных и установится на выступе первой ступени. Далее груз 30 перемещается вниз уже без верхней части, а когда пройдет вторую ступень - отделится следующая его часть и установится на выступе второй ступени. П так далее, до тех пор, пока не останется одна нижняя часть груза 30.
Таким образом, при израсходовании части заготовок в кассете масса груз уменьшается на массу одной из своих частей соответственно.
После того, как будет израсходована вся стопа заготовок, в рабочую позицию устанавливают другую, загруженную заготовками, кассету 11. При
этом нижняя часть груза 30 поднимается вверх, на нее поочередно нанизываются остальные части и груз принимает исходное верхнее положение.
Далее цикл работы повторяется.
Загрузку кассет для удобства работы производят не каждьй раз сразу же после опорожнения одной кассеты, а после опорожнения нескольких кассет, но так, чтобы при этом не быпо бы надобности останавливать работу всей линии.
Формулаизобр етения
Устройство для поштучной вьдачи заготовок по а,с. Р 1456271, отличающееся тем, что, с целью повьш1ения надёжности за счет.стабилизации усилия давления снизу стопы заготовок на захватный орган промьш - ленного робота, груз выполнен составным из нескольких частей, массы которых, кроме нижней,равны, а масса нижней больше каждой из частей на веЛи- чину массы соединенных с ней толкателя, штока и подъемной вилки, при этом в полости стойки выполнены ступенчатые упоры по числу частей груза.
Л
20
19
П



| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для поштучной выдачи заготовок | 1986 |
|
SU1324728A1 |
| Устройство для шаговой подачи стопы заготовок | 1984 |
|
SU1194544A1 |
| Магазинное устройство | 1987 |
|
SU1423227A1 |
| Магазин для размещения штучных заготовок | 1988 |
|
SU1532156A1 |
| Магазинное устройство | 1981 |
|
SU1003972A1 |
| Магазинное устройство | 1984 |
|
SU1255248A1 |
| Устройство для отделения верхнего листа от стопы Васильева В.И. | 1986 |
|
SU1484416A1 |
| Автоматизированный комплекс для многономенклатурной штамповки деталей из штучных заготовок | 1986 |
|
SU1532149A1 |
| Магазинное устройство к промышленному роботу | 1985 |
|
SU1326374A1 |
| Автоматизированный комплекс для многономенклатурной штамповки деталей из штучных заготовок | 1986 |
|
SU1637909A1 |

Изобретение относится к обработке металлов давлением. Оно м.б. использовано для вьщачи штучных заготовок из магазина и подачи их в рабочую зону пресса. Цель изобретения - повышение надежности путем стабилизации усилия, давления стопы заготовок на захватньпЧ орган промышленного робота. Устр-во содержит установленную на станине 1 пустотелую ступенчатую стойку 4 и поворотное кольцо 7. На последнем закреплены кассеты 1 1 со сменой заготовок 14.Подъем стопы осуществляется посредством толкателя 27, смонтированного на подъемной вилке 26, кон- сольно установленной на.штоке 20. Привод подъема и поштучной выдачи заготовок из стопы выполнен в виде груза 30, состоящего из нескольких частей и связанного посредством гибкой связи с подъемной вилкой 26. Массы каждой части, кроме нижней, равны ме)вду собой, а масса нижней - больше каждой из частей на массу соединенных с ней деталей. Пток 20 связан с управляемым шариковым замком 18, который освобождает шток в момент захвата верхней заготовки пневматическим схватом руки промьшшенного робота. Устройство позволяет предотвратить нарушение нормального функционирования промьпапенного робота. 5 ил. tc W
Щи2.1
ВидА
фиг. 2
Шг.
6-6
1ШЯМВМВ«В1
.10 .
ш
10
li
11 12
Щиг.З
г-г
20
36 3
Щи г, 5
| Устройство для поштучной выдачи заготовок | 1987 |
|
SU1456271A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
