Изобретение относится к конструкциям устройств для управления телескопическим захватом стеллажного крана-штабелера, может быть использовано в автоматизированных складах и является усовершенствованием устройства по авт. св. № -1000353.
Цель изобретения - повышение надежности.
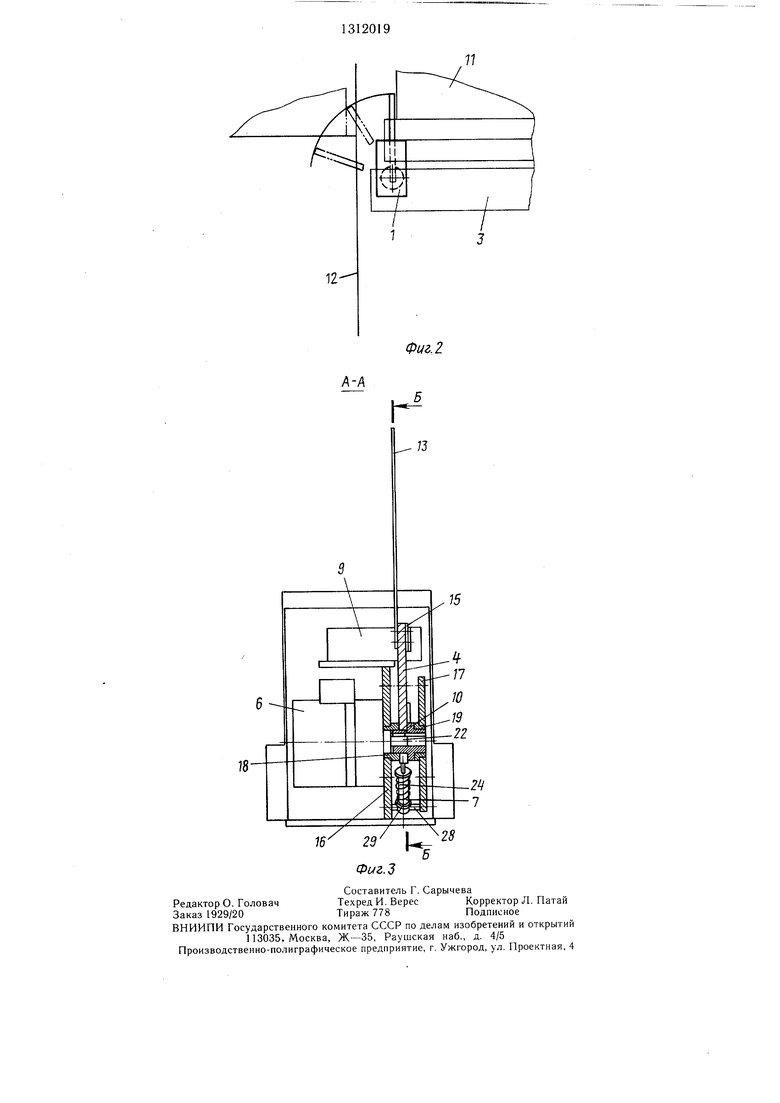
На фиг. 1 изображено устройство для управления телескопическим захватом, об- ш,ий вид, и положение захвата относительно ячейки стеллажа при разгрузке последнего; на фиг. 2 - то же, при загрузке; на фиг. 3 - разрез А-А на фиг. 1; на фиг. 4 - разрез Б-Б на фиг. 3.
10
ние II, совмеш,аясь с осью врашения ш.упа, благодаря чему исключается плечо силы пружины и соответственно противомомент вращению электродвигателя при трогании на подъем, когда крутящий момент от массы щупа достигает максимального значения.
Так как крутящий момент от силы пружины и от веса щупа при его повороте направлены в разные стороны, при вращении щупа они компенсируют друг друга, что значительно снижает нагрузку на электродвигатель.
При двухрядном расположении стеллажей, на неподвижной платформе захвата устанавливаются два устройства на противоУстройство 1 для управления телеско- положных сторонах платформы,
пическим захватом 2 смонтировано на не-Устройство работает следующим образом,
подвижной платформе 3 захвата и содер-При загрузке стеллажа 12 щтабелер с
жит щуп 4, кронштейн 5, малогабаритныйгрузом 11 на телескопическом захвате 2 и
электродвигатель б со встроенным редукто-со щупом в исходном вертикальном положером, силовую пружину 7 и датчики 8 и 9нии устанавливается напротив заданной
для контроля крайних положений щупа 4.20 ячейки стеллажа. При этом грузовая поверхПервый конец щупа 4 снабжен двухконечной цапфой 10, помещенной на оси вращения щупа и имеющей центральное отверстие со шпоночным пазом. Цапфа жестко, например с помощью сварки, связана со щупом. На втором конце щупа для контакта с грузом 11, располагающимся в стеллаже 12 или на подвижной платформе захвата 2, закреплен гибкий упругий стержень 13, выполненный в виде пластины, обращенной ребром в сторону стеллажа 12. На обоих концах щупа 4 закреплены флажки 14 и 15, взаимодействующие с датчиками 8 и 9 соответственно.
Кронштейн 5 содержит закрепленную на его основании стойку 16 и связанную с
25
30
ность захвата оказывается несколько выше опорной поверхности ячейки. По команде из схемы управления включается электродвигатель 6, и щуп 4, надежно связанный с его валом 22 щпонкой 23, вращаясь на цапфе 10 во втулках 18 и 19, переходит из исходного в нижнее положение I. Датчик 9 освобождается, а датчик 8 замыкается, включая электродвигатель 6 и выдавая сигнал в схему - управления на загрузку ячейки. Телескопический захват 2 выдвигается, платформа 3 опускается несколько ниже опорной поверхности ячейки и груз остается в ячейке. Затем по команде из схемы управления захват 2 возвращается в исходное положение, после чего
ней съемную стенку 17. Стойка 16 и стен- -зд включается электродвигатель 6 и щуп возка 17 снабжены соосными подшипниковыми втулками 18 и 19 соответственно, в которые помещены концы цапфы 10. На стойке 16 выполнены ограничители 20 и 21 поворота щупа 4.
вращается в исходное положение, где датчик 9 отключает двигатель 6.
При движении щупа из исходного положения первый его конец шарниром 25 воздействует на шток 24, заставляя его паМалогабаритный электродвигатель 6 со 40 зом 27 скользит по стержню 28, совервстроенным редуктором болтами закреплен на стойке 16, а вал 22 редуктора снабжен щпонкой 23 и помещен в центральное отверстие цапфы 10.
Силовая пружина 7 надета на шток 24, на одном конце которого выполнены шарнир 25, связывающий щток с первым концом щупа 4, и бурт 26, в который упирается пружина 7, а на другом выполнен продольный паз 27, в который помещен стержень 28, своими концами вставленный в соосные отверстия в стойке 16 и стенке 17, и установлено кольцо 29, опертое на стержень 28 и служащее опорой второму концу пружины. Весь механизм устройства защищен от внешних воздействий кожу45
50
хом 30. Шарнир 25, стержень 28 и ось вра- 55 невозможна.
шая плоскопараллельное движение, и буртом 26 воздействовать на пружину 7, сжимая ее. В конце поворота ось пружины совмещается с осью вращения щупа, что приводит к исключению плеча силы пружины и ее крутящего момента, а щуп под действием силы тяжести прижимается к ограничителю 20 при выключенном двигателе 6. Если на пути движения щупа из исходного положения встречается препятствие, он упирается в него стержнем и останавливается, прекращая вращение двигателя, и последний через непродолжительное заданное время отключается. Наступает аварийная ситуация, когда датчики 8 и 9 незамкнуты и дальнейшая работа штабелера
щения щупа 4 расположены так, что при повороте щупа в крайнее нижнее положение I ось пружины переходит в положеПри возврате щупа в исходное вертикальное положение ось пружины отклоняется от положения И, плечо силы пру
ние II, совмеш,аясь с осью врашения ш.упа, благодаря чему исключается плечо силы пружины и соответственно противомомент вращению электродвигателя при трогании на подъем, когда крутящий момент от массы щупа достигает максимального значения.
Так как крутящий момент от силы пружины и от веса щупа при его повороте направлены в разные стороны, при вращении щупа они компенсируют друг друга, что значительно снижает нагрузку на электродвигатель.
При двухрядном расположении стеллажей, на неподвижной платформе захвата устанавливаются два устройства на противо
ность захвата оказывается несколько выше опорной поверхности ячейки. По команде из схемы управления включается электродвигатель 6, и щуп 4, надежно связанный с его валом 22 щпонкой 23, вращаясь на цапфе 10 во втулках 18 и 19, переходит из исходного в нижнее положение I. Датчик 9 освобождается, а датчик 8 замыкается, включая электродвигатель 6 и выдавая сигнал в схему - управления на загрузку ячейки. Телескопический захват 2 выдвигается, платформа 3 опускается несколько ниже опорной поверхности ячейки и груз остается в ячейке. Затем по команде из схемы управления захват 2 возвращается в исходное положение, после чего
включается электродвигатель 6 и щуп
включается электродвигатель 6 и щуп
вращается в исходное положение, где датчик 9 отключает двигатель 6.
При движении щупа из исходного положения первый его конец шарниром 25 воздействует на шток 24, заставляя его па зом 27 скользит по стержню 28, соверзом 27 скользит по стержню 28, совер
невозможна.
шая плоскопараллельное движение, и буртом 26 воздействовать на пружину 7, сжимая ее. В конце поворота ось пружины совмещается с осью вращения щупа, что приводит к исключению плеча силы пружины и ее крутящего момента, а щуп под действием силы тяжести прижимается к ограничителю 20 при выключенном двигателе 6. Если на пути движения щупа из исходного положения встречается препятствие, он упирается в него стержнем и останавливается, прекращая вращение двигателя, и последний через непродолжительное заданное время отключается. Наступает аварийная ситуация, когда датчики 8 и 9 незамкнуты и дальнейшая работа штабелера
невозможна.
При возврате щупа в исходное вертикальное положение ось пружины отклоняется от положения И, плечо силы пружины увеличивается, крутящий момент от силы пружины возрастает и в конце хода пружина надежно прижимает щуп к ограничителю 21 при выключенном двигателе 6.
Если груз 11 при загрузке уложен неправильно, то щуп при возврате в исходное положение упирается в него, останавливая вращение двигателя, который также через непродолжительное заданное время отключается. Наступает аналогичная описанной аварийная ситуация.
При разгрузке стеллажа штабеллер с незанятым телескопическим захватом и со щупом в исходном положении устанавливается напротив заданной ячейки, причем грузовая поверхность захвата оказывается несколько ниже опорной поверхности ячейки. Далее по команде из схемы управления соверщается работа, аналогичная загрузочной операции.
При передвижении штабелера вдоль стеллажа с грузом последний может по каким- либо причинам сдвинуться в сторону устройства 1 (в сторону стеллажа) воздействуя на щуп 4, который в этом случае отклоняется от вертикального положения, а флажок 15 размыкает датчик 9. Последний разрывает цепь управления штабеле- ром, дальнейшее передвижение которого прекращается.
В нескольких случаях отказов в электросхеме управления щтабелером последний
может двигаться вдоль стеллажа со щупом в нижнем положении. Щуп 4 своим стержнем 13 в этом случае наезжает на боковую стойку ячейки или на груз. Стер- г жень упруго изгибается, а, попадая в пустое пространство, под действием сил упругости вновь выпрямляется.
Формула изобретения
0 1. Устройство для управления телескопическим захватом стеллажного крана-шта- белера по авт. св. № 1000353, отличающееся тем, что, с целью повышения надежности, оно снабжено штоком, располо женным внутри пружины, шарнирно соединенным одним концом с первым концом щупа и выполненным с продольным пазом и буртиком, подвижным кольцом, охватывающим шток с возможностью опирания на смонтированный неподвижно и размещенный
0 в упомянутом пазу стержень, и полой цапфой, связанной с первым концом щупа И посредством шпонки - с валом привода и установленной в подшипниковых узлах, при этом пружина расположена между буртиком и кольцом.
5
2. Устройство по п. 1, отличающееся тем, что на втором конце щупа закреплен упругий стержень для взаимодействия с грузом.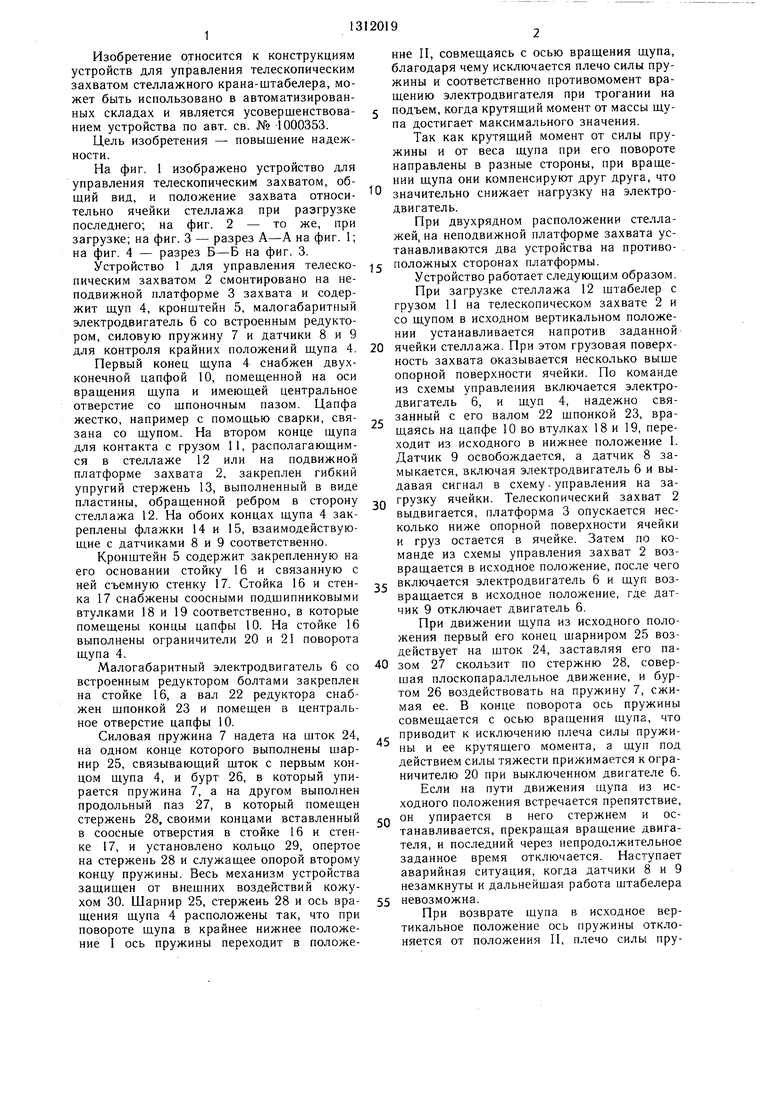

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления телескопическим захватом стеллажного крана-штабелера | 1981 |
|
SU1000353A1 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1988 |
|
SU1512873A1 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1990 |
|
SU1733346A1 |
| ШТАБЕЛИРУЮЩЕЕ УСТРОЙСТВО | 1991 |
|
RU2017675C1 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1988 |
|
SU1594079A1 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1988 |
|
SU1643341A1 |
| Устройство для управления телескопическим захватом стеллажного крана-штабелера | 1982 |
|
SU1008156A1 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1982 |
|
SU1034929A1 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1985 |
|
SU1341122A2 |
| Устройство для управления телескопическим захватом стеллажного крана-штабелера | 1981 |
|
SU1011468A1 |
Изобретение относится к конструкции устройств для управления телескопическим захватом стеллажного крана-штабелера. Целью изобретения является повышение надежности устройства. Оно содержит узел соединения привода со щупом 4 с возможностью совмещения оси силовой пружины 7 с осью вращения щупа 4 в его нижнем положении за счет снабжения щупа 4 цапфой 10 и размещения ее концов в подшипниковых втулках 18 и 19 кронщтейна 5. Вал 22 редуктора электродвигателя со щупом соединены щпонкой 23 для надежности. Конец щупа 4 снабжен гибким упругим стержнем 13. На обоих концах щупа 4 закреплены флажки 14 и 15, взаимодействующие с датчиками 8 и 9, 1 з.п. ф-лы, 4 нл. 6-6 (Л со го о со NJ 27 Л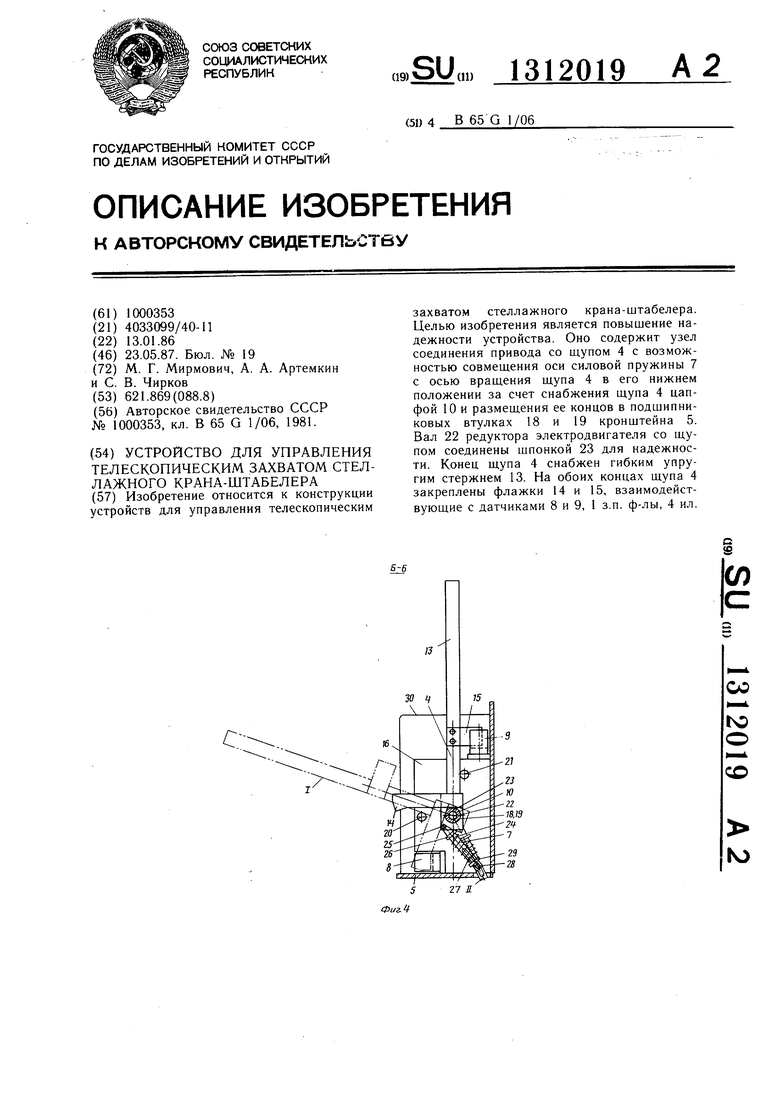
Фиг.1
5
Составитель Г. Сарычева
Редактор О. ГоловачТехред И. ВересКорректор Л. Патай
Заказ 1929/20Тираж 778Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
