СЛ
0
00
ы
-16
315
Изобретение относится к устройствам для управления приводами телескопических захватов стеллажных кранов- штабелерово
Целью изобретения является упрощение и повьшение производительности
На фиг.1 представлено устройство в исходном положении; на фиг.2 - вид А на фиго1; на фигоЗ - элементы устройства при отсутствии препятствия; на фиг о4 - то .же при наличии препятствия; на фиг«5 - щупо
Устройство содержит закрепленные на неподвижной платформе 1 захвата щуп 2 и датчики исходного 3 и крайнего 4 положений щупа 2, включенные в цепь управления захватом На одном конце щупа.2 закреплен флажок 5 с возможностью взаимодействия с датчиком 3 исходного положения. На неподвижной платформе закреплен также дополнительный датчик 6 Щзт 2 установлен на оси 7 и снабжен двуплечим рычагом 8, установленным на оси 7 щупа 2 о Двуплечий рычаг/ 8 пружиной 9 прижимается к упору 10, тановленному на неподвижной платформе 1 о Щуп 2 пружиной J1 прижимается к упору 12, установленному на двуплечем рычаге во Один конец последнего расположен с возможностью взаимодействия с подвижной платформой. 13 захвата. На .другом конце двуплечего рычага 8 закреплен с возможностью взаимодействия с дополнительным датчиком 6 флажок 14 о Причем флажок 5 щупа 2 и флажок 14 двуплечего рьтага 8 имеют ВОЗМОЖНОСТЬ воздействовать соответственно на датчик 4 крайнего положения щупа 2 и дополнительньш датчик 6 одновременно.
При помощи подвижной платформы 13 может перемещаться груз 15, а на балке 16 стеллажа может быть размещен груз 17, причем платформа 13 имеет фигурный паз, являющийся упорным элементом Двуплечий рычаг 8 может быть закреплен на специальной оси непосредственно на неподвижной платформе 1 или на щупе 2„ Последний может быть вьшолнен П-образным и закреплен на другой стороне неподвижной платформы 1 на обычной оси (фиг о5).
Флажками 5 и 14 могут быть окончания щупа 2 и двуплечего рычага В
Датчик 4 крайнего положения и дополнительный датчик- 6 соединены в
8734
релейной схеме управления приводом захвата (не обозначено) последовательно, а в схеме с использованием логических элементов подключены к входам логического элемента, обеспечивая в обоих случаях конъюнкцию сигналов
В исходном положении (фиго и 2) двуплечий рычаг 8 пружиной 9 прижат
IQ к упору 10. Щуп 2 пружиной 11 прижат к упору 12 на двуплечем рычаге 8. При этом двуплечий рычаг 8 и щуп 2 находятся в вертикальном положении, а флажок 5 щупа 2 воздействует на чик 3 исходного положения, которьй информирует систему управления о том, что щуп 2 находится в исходном, а груз 15 на подвижной платформе 13 в нормальном положении,
20 При отсутствии препятствия устройство работает следующим образом
Подвижная платформа 13 с грузом 15 (фигоЗ), перемещаясь, например, вправо, воздействует на двуплечий.ры25 чаг 8 внутренней поверхностью паза и, преодолевая сопротивление пружину 9, поворачивает его вправо Поскольку щуп 2 пружиной 11 прижат к упору 12 на двуплечем рычаге 8, то и щуп 2 по30 ворачивается вправо вместе с двуплечим рычагом 8„
Так как препятствие на пути перемещения подвижной платформы 13 отсутствует, двуплечий рычаг 8 и щуп
35 2 поворачиваются в свое крайнее правое положение При этом флажок 5 воздействует на датчик 4 крайнего положения, а флажок 14 - на до- полнительный датчик 6„ Наличие сиг-. .
40 налов одновременно .от двух указанных датчиков свидетельствует о том, что препятствие на пути перемещения подвижной платформы 13 отсутствует При наличии препятствия устрой5 ство работает следующим образом. В начале выдвижения подвижной платформы 13 вправо элементы устройства функционируют аналогично Встречая на своем пути груз 17,
g .щуп 2 (), преодолевая сопротивление пружины I1, останавливается iB своем движении, а подвижная платформа 13 продолжает перемещение вправо, перемещая двуплечий рычаг 8.до
5 взаимодействия его флажка 14 с дополнительным датчиком 6, Наличие сигна,- ла только от датчика 6 и отсутствие при этом сигнала, от датчика 4 крайнего положения щупа 2 свидетельст5151
вует о наличии препятствия (груза 17) и подвижная платформа 13 возвращается в исходное положение.
Сигнал от датчика 4 крайнего положения также отсутствует и при поломке щупа 2. Таким образом, отсутствие конъюнкции сигналов от датчиков крайнего положения 4 и дополнительного 6 информирует систему управления приводом телескопического захвата как о наличии препятствия, так и неисправности (поломке) щупа 2. Формула изобретения
Устройство для управления приводом телескопического захвата стеллажного крана-штабелера, содержащее закрепленные на конце неподвижной платформы захвата с возможностью поворота в вертикальной плоскости в сторону ячейки стеллажа подпружиненный щуп и датчики крайних его положений,включенные в цепь управления приводом
8736
захвата, упоры для ограничения крайних положений щупа, флажки, один из которых закреплен на щупе с возможностью взаимодействия с датчиками крайних его положений и приспособление для перемещения щупа в сторону ячейки стеллажа, отличающееся TeMj что, с целью упрощения
Q и повышения производительности 1 оно содержит закрепленный на оси щупа и подпружиненный относительно него и неподвижной платформы двуплечий рычаг, на одном конце которого закреп5 лен второй флажок, фигурный упорный элемент, размещенный на неподвижной платформе с возможностью взаимодействия с вторым концом двуплечего рычага, и датчик для взаимодействия
0 с флажком первого конца двуплечего рычага, размещенный в одной горизонтальной плоскости, с датчиком второго крайнего положения щупа и включенньй в цепь управления приводом захвата.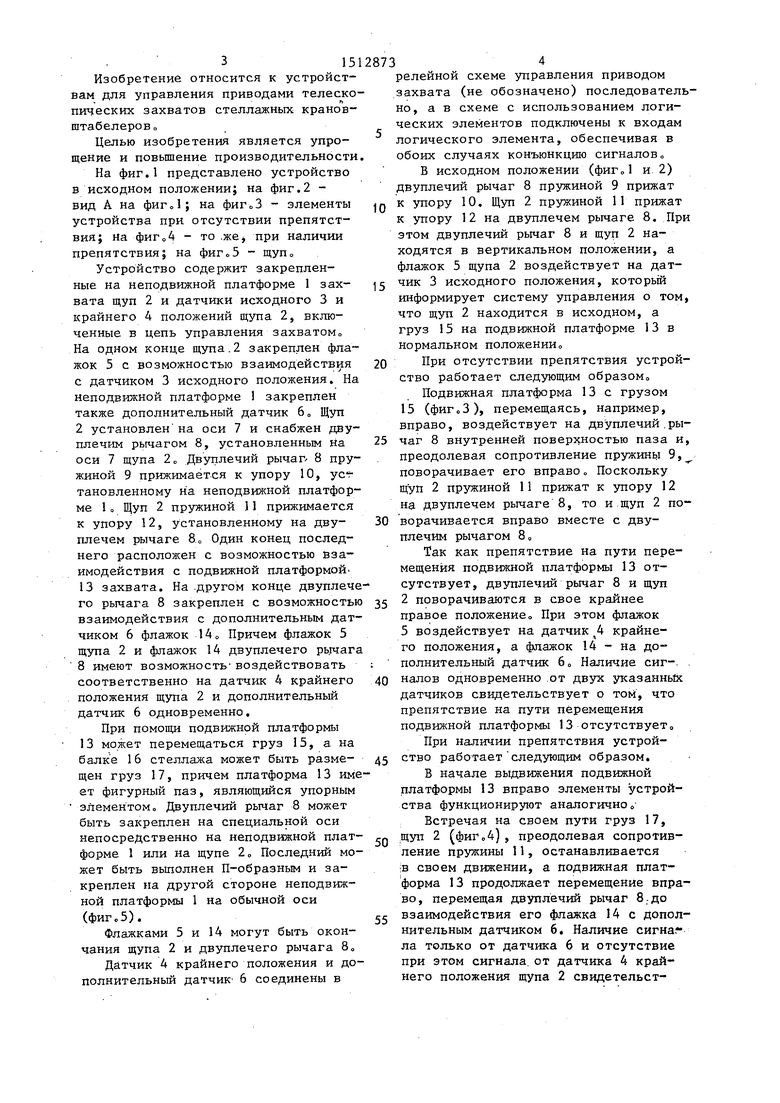

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления телескопическим захватом стеллажного крана-штабелера | 1981 |
|
SU1000353A1 |
| Устройство для управления телескопическим захватом стеллажного крана-штабелера | 1986 |
|
SU1312019A2 |
| Телескопический грузозахват | 1989 |
|
SU1671550A1 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1986 |
|
SU1384481A1 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1990 |
|
SU1733346A1 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1988 |
|
SU1518229A2 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1988 |
|
SU1643341A1 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1988 |
|
SU1594079A1 |
| Устройство для управления телескопическим захватом стеллажного крана-штабелера | 1983 |
|
SU1181953A1 |
| Устройство для ориентации платформы стеллажного крана-штабелера | 1982 |
|
SU1071535A1 |

Изобретение относится к устройствам для управления приводами телескопических захватов стеллажных кранов-штабелеров. Цель изобретения - повышение производительности. Изобретение позволяет использовать в качестве привода поворота щупа 2 верхнюю подвижную платформу 13. Перемещаясь, платформа 13 фигурным пазом воздействует на двуплечий рычаг 8 и, преодолевая сопротивление пружины 9, поворачивает его. Вместе с двуплечим рычагом 8 поворачивается и щуп 2, который прижат к упору 12 на двуплечем рычаге 8 пружиной 11. Встречая на своем пути груз 17, щуп 2, преодолевая сопротивление пружины 11, останавливается, а платформа 13 продолжает перемещать двуплечий рычаг 8 до взаимодействия его флажка 14 с дополнительным датчиком 6. Наличие сигнала от датчика 6 и отсутствие сигнала от датчика 4 крайнего положения щупа 2 свидетельствует о наличие препятствия (груза 17), и платформа возвращается в исходное положение. 5 ил.
Фи.2
Фиг.З
СЗ
.«
Фиг. 5
| Устройство для управления телескопическим захватом стеллажного крана-штабелера | 1981 |
|
SU1000353A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
