э
х
1 I I
S
о
4bw 00 СО
-N
Изобретение относится к промышленному транспорту, а именно к конструкциям грузоподъемников кранов-штабелеров, и может быть использовано для управления приводом телескопического захвата крана- штабелера.
Цель изобретения - повышение удобства эксплуатации.
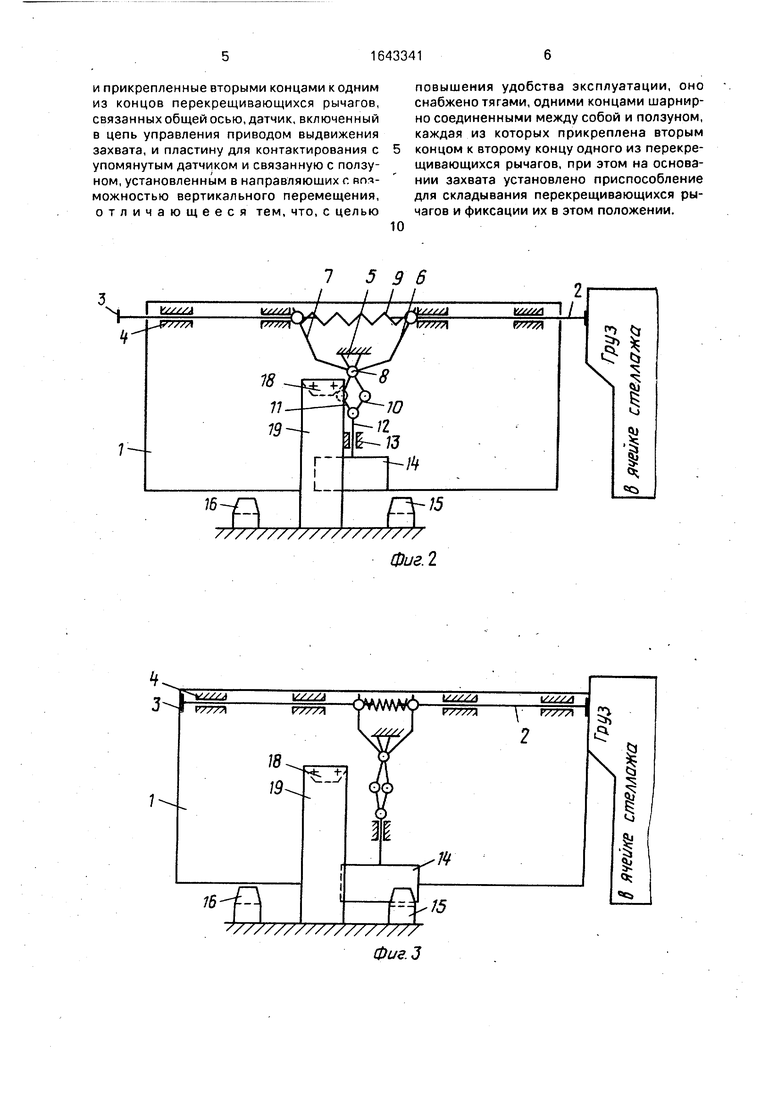
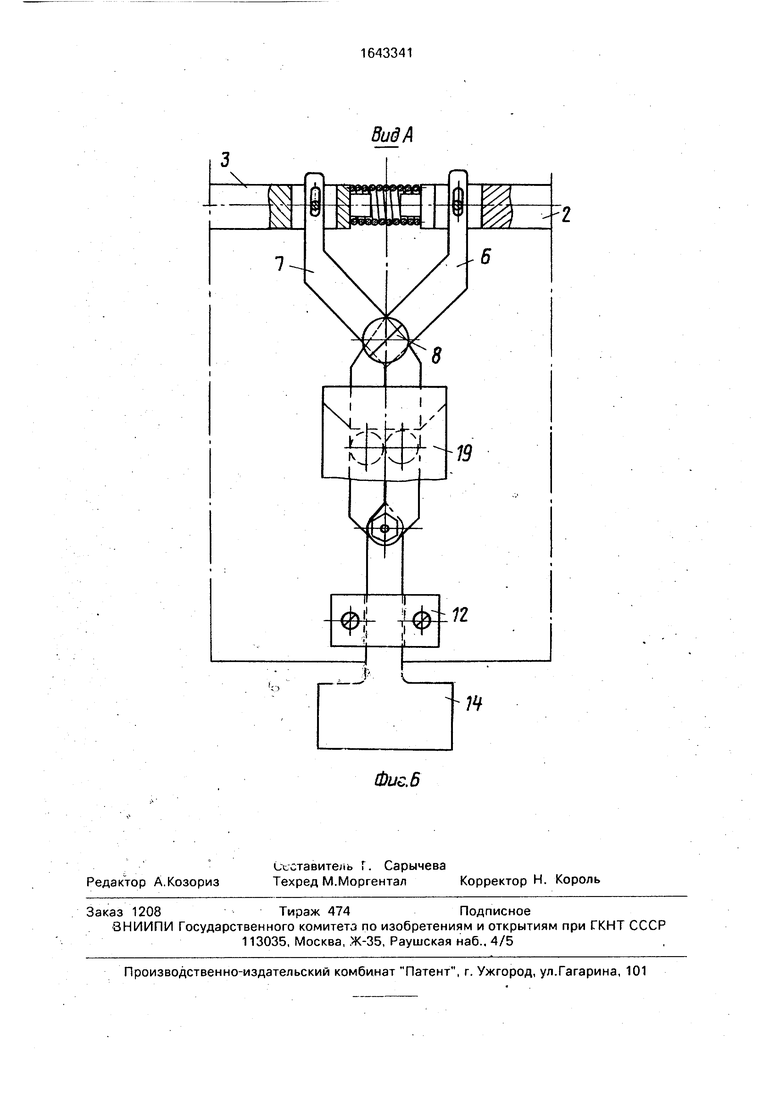
На фиг.1 показано устройство в исходном положении (для грузоподъемника двустороннего действия); на фиг.2 - то же, когда штоки полностью выдвинуты за счет смещения верхней платформы вправо от исходного положения; на фиг.З - то же, когда штоки утоплены в результате взаимодействия одного из них с грузом в ячейке стеллажа; на фиг.4 - рычажно-тяговый механизм, вид сбоку; на фиг.5 - устройство, вариант выполнения; на фиг.6 - вид А на фиг.4.
Устройство для управления приводом телескопического захвата стеллажного кра- на-штабелера установлено на подвижной платформе 1 захвата и содержит два соосно расположенных подпружиненных штока 2 и 3, которые установлены в направляющих 4. Рычажный механизм 5 для синхронного перемещения штоков 2 и 3 состоит из двух пересекающихся рычагов: правого 6 и левого 7, которые в месте их пересечения прикреплены к оси 8 подвижной платформы 1. Верхние концы рычагов 6 и 7 шарнирно связаны со штоками 2 и 3, а последние связаны между собой пружиной 9. Нижние концы рычагов 6 и 7 с помощью тяг 10 и 11 соединены с ползуном 12, который установлен в направляющей 13. Нижний конец ползуна 12 прикреплен жестко к переключающей пластине 14, предназначенной для взаимодействия с бесконтактными выключателями 15 и 16, которые установлены на основании 17, например, на неподвижной платформе телескопического захвата. Кроме того, нижние концы рычагов 6и7 взаимодействуют с упором 18, установленным на неподвижном основании 17 посредством стойки 19. Возможен вариант выполнения шарниров в соединениях рычагов 6 и 7 с тягами 10 и 11 с применением подшипника.
Устройство работает следующим образом.
Стеллажный кран-штабелер, несущий телескопический захват с грузом (не показан), установленным на верхней подвижной платформе 1 грузоподъемника, при подходе к ячейке стеллажа включает привод (не показан) выдвижения платформ грузоподъем- ника вправо. Верхняя подвижная платформа 1 с грузом начинает выдвижение вправо (фиг.2), и одновременно выдвигаются штоки 2 (вправо) и 3 (влево), а так как платформа 1 при выдвижении вправо несет на себе штоки 2 и 3, рычажный механизм 5 и пластину 14, жестко связаннуюс ползуном
12, который, в свою очередь, посредством тяг 10 и 11 связан с нижними концами рычагов 6 и 7.
Платформа 1, штоки 2 и 3 двигаются поступательно, а рычаги 6 и 7, связанные
шарнирно верхними концами со штоками 2 и 3, кроме поступательного перемещения получают вращение вокруг оси 8. Это происходит за счет скосов упора 18, с которым взаимодействуют нижние концы рычагов 6
и 7 за счет пружины 9. В результате поворота рычагов 6 и 7 переключающая пластина 14 приподнимается и втягивается в габарит платформы 1 по высоте, занимая положение, изображенное на фиг.2. Это позволяет
исключить взаимодействие пластины 14 с выключателем 15, предназначенным для отключения привода выдвижения платформы и его реверса, при перемещении ее право. В результате груз, который находится на
платформе 1, беспрепятственно подается в ячейку стеллажа.
Если же при выдвижении верхней подвижной платформы 1 окажется, что в ячейке есть груз, то выступающий конец штока 2
(фиг.2 и 3) вступит в контакт с грузом, прекратит свое поступательное перемещение и начнет утапливаться в габарит движущейся платформы 1. Поскольку шток 2 связан с рычагами 6 и 7, то, утапливаясь, он повернет
эти рычаги в положение, изображенное на фиг.З. При этом пластина 14 опустится в паз выключателя 15, подаст сигнал в систему управления краном-штабелером о занятости ячейки с последующим прохождением
сигнала на исполнительные механизмы. Если ячейка стеллажа не занята, шток 2, не встречая препятствия, позволяет свободно установить груз в ячейку стеллажа, после чего платформа 1 возвращается в исходное
положение, и кран-штабелер готов к дальнейшей работе. Аналогично работает устройство при движении платформы 1 с грузом влево.
Изобретение позволяет путем утапли0 вания штоков заподлицо с платформой в исходном положении повыси ь удобство в эксплуатации крана-штабелера.
Формула изобретения 5 Устройство для управления приводом телескопического захвата стеллажного крана-штабелера, содержащее установленные на выдвижной платформе соосно друг другу подпружиненные штоки, обращенные упорными концами в противоположные стороны
и прикрепленные вторыми концами к одним из концов перекрещивающихся рычагов, связанных общей осью, датчик, включенный в цепь управления приводом выдвижения захвата, и пластину для контактирования с упомянутым датчиком и связанную с ползуном, установленным в направляющих с возможностью вертикального перемещения, отличающееся тем, что, с целью
0
повышения удобства эксплуатации, оно снабжено тягами, одними концами шарнир- но соединенными между собой и ползуном, каждая из которых прикреплена вторым концом к второму концу одного из перекрещивающихся рычагов, при этом на основании захвата установлено приспособление для складывания перекрещивающихся рычагов и фиксации их в этом положении.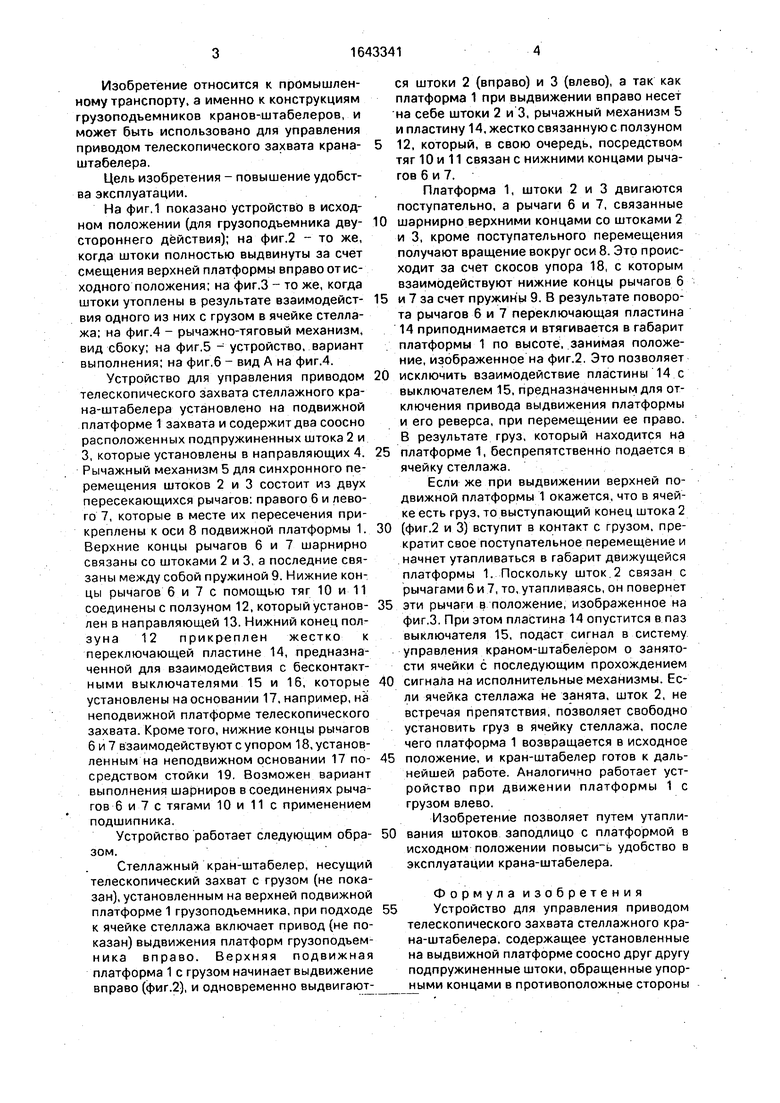
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1985 |
|
SU1341122A2 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1984 |
|
SU1204507A1 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1982 |
|
SU1034929A1 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1982 |
|
SU1082706A1 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1986 |
|
SU1418206A1 |
| Устройство для управления телескопическим захватом стеллажного крана-штабелера | 1981 |
|
SU1024393A1 |
| Устройство для управления телескопическим захватом стеллажного крана-штабелера | 1982 |
|
SU1008156A1 |
| Устройство для управления приводом выдвижения телескопического захвата стеллажного крана-штабелера | 1982 |
|
SU1062138A1 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1990 |
|
SU1733346A1 |
| Устройство для ориентации платформы стеллажного крана-штабелера | 1982 |
|
SU1071535A1 |

Изобретение относится к промышленному транспорту, в частности к стеллажным кранам-штабелерам. Цель изобретения - повышение удобства эксплуатации. Устройство представляет собой механическое приспособление со штоками 2 и 3, выдвигаемыми в процессе выдвижения платформы 1 телескопического захвата вправо или влево от исходного положения. Платформа 1 захвата при выдвижении вправо или влево несет на себе штоки (Ш) 2 и 3, рычаги (Р) 6 и 7 и пластину (П) 14, предназначенную для взаимодействия с выключателями (В) 15 и 16. При движении в сторону платформа 1 со Ш 2 и 3 перемещается поступательно, а Р 6 и 7, кроме поступательного перемещения, поворачиваются вокруг оси 8 в результате взаимодействия их с неподвижным упором 18 и под действием пружины 9. При повороте Р 6 и 7 концы Ш 2 и 3 выдвигаются и при встрече с грузом, утапливаясь и поворачивая Р 6 и 7 в исходное положение, вводят П 14 в чувствительную зону В 15 или 16 в зависимости от направления движения платформы 1. 6 ил. Ё
фиг. 2
Фиг.З
К
/// /// /// /// ss/ /s/ Фиг. 4
ВидА
| Устройство для управления телескопическим захватом стеллажного крана-штабелера | 1981 |
|
SU1024393A1 |
| кл, В 65 G 1/06, 1981. | |||
