Изобретение относится к промышленному транспорту, в частности к устройствам для управления телескопическими захватами стеллажных кранов-штабелеров.
Известно устройство для управления телескопическим захватом крана-штабелера, содержащее упор, закрепленный на подпружиненном штоке, установленном в опоре, прикрепленной к верхней платформе захвата, и датчик положения упора. Такое устройство позволяет осуш,ествить управление захватом при его односторонней работе. При двусторонней необходимо устанавливать ен1,е одно такое устройство на другом конце захвата 1.
Однако при использовании двух таких устройств конструкция захвата усложняется и повышается металлоемкость, кроме того, усложняется система управления, поскольку требуется в нее подключать два датчика положения упоров этих устройств, т.е. снижается удобство эксплуатации.
Известно также устройство для управления телескопическим захватом стеллажного крана-штабелера, содержащее упоры, закрепленные на противоположных концах штоки, установленного в жестко прикрепленной к верхней платформе захвата опоре, и установленный на неподвижной платформе в ее средней части датчик положения упоров. Это устройство удобнее в эксплуатации, так, как позволяет осуществить управление при двусторонней работе захвата 2.
Однако оно недостаточно надежно в работе, поскольку осуществляет только точечный контакт штока с датчиком путем поворота этого штока для взаимодействия криволинейной поверхности с контактным датчиком, причем в данной конструкции
использовать бесконтактный датчик нельзя
Цель изобретения - повышение надежности.
Поставленная цель достигается тем, что устройство для управления телескопическим захватом стеллажного крана-штабелера, содержащее упоры, закрепленные на противоположных концах штока, установленного в жестко прикрепленной к верхней платформе захвата опоре, и установленный на неподвижной платформе в ее средней части датчик положения упоров, снабжено втулками, связанными со средней частью штока с возможностью горизонтального перемещения и соединенными между собой пружиной, и пластинами, один конец которых шарнирно прикреплен к втулкам, а средние части шарнирно соединены между собой, при этом шарниры крепления концов пластин расположены выше шарнира соединения этих пластин.
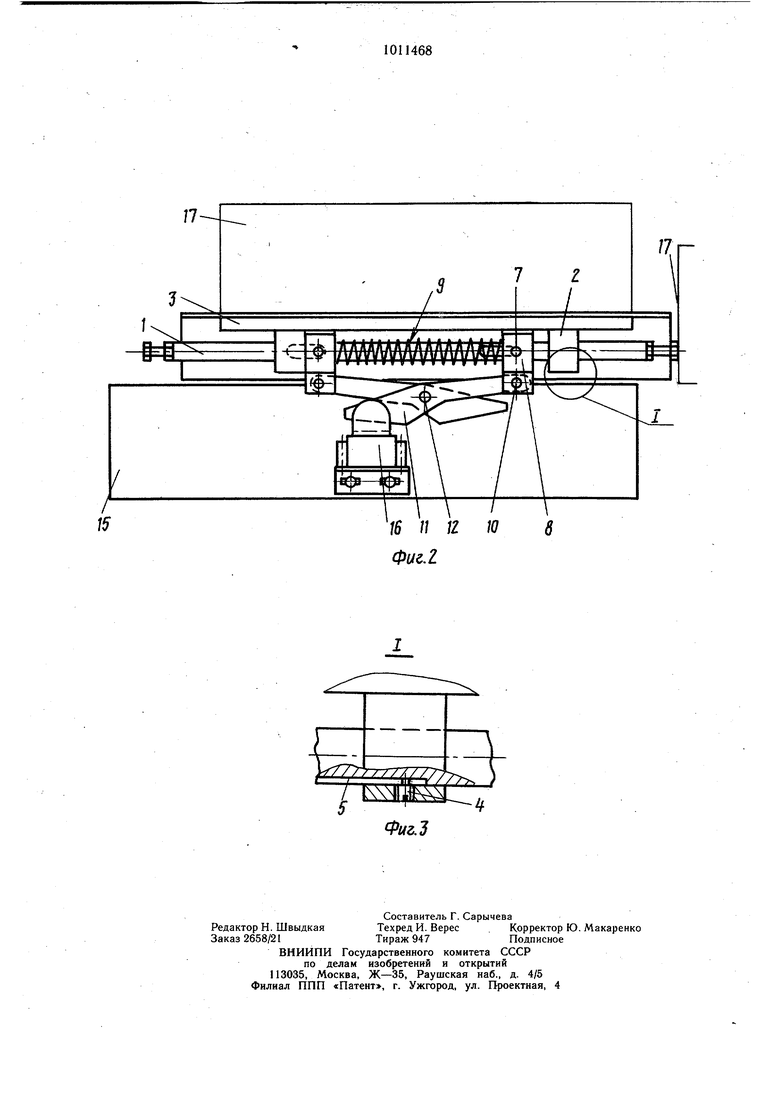
На фиг. 1 показано устройство, общий вид; на фиг. 2 - то же, при выдвинутой верхней платформе и взаимодействии упора с грузом; на фиг. 3 - узел I на фиг. 2.
Устройство управления телескопическим захватом стеллажного крана-щтабелера содержит щток 1, установленный в
Q опорах 2, жестко прикрепленных к верхней выдвижной платформе 3 захвата. В опорах установлены фиксаторы 4, в штоке I выполнены пазы 5, в которые входит фиксатор 4. В средней части штока 1 имеются два паза 6, через которые посредством
5 Цтифтов 7 на штоке установлены втулки 8, связанные пружиной 9. К нижним частям втулок 8 посредством осей 10 шарнирно прикреплены пластины 11. Между собой пластины соединены осью 12, расположенной ниже осей 10. На противоположных
0 концах штока 1 закреплены упоры 13, фиксирующиеся гайками 14. На неподвижной платформе 15 захвата установлен датчик 16 положения упоров. Датчик 16 целесообразно выполнить бесконтактным. На плятформе 3 установлен груз 17.
Устройство работает следующим образом.
Стеллажный кран-щтабелер с грузом 17, установленным на подвижной платформе 3, при подходе к ячейке стеллажа включаQ ет привод выдвижения платформы с грузом в одну из сторон крана-щтабелера. Выдвижная платформа с грузом 17 начинает движение внутрь ячейки стелажа (фиг. 2). Если при движении платформы с грузом окажется, что в ячейке стеллажа
5 находится груз 17, т.е ячейка занята, то упор 13, наткнувшись на груз, воздействует на шток 1, который, перемещаясь, передает движение на пластины 11, и пластины ничинают опускаться, а одна из них в крайнем положении входит в паз бесконтактного
0 датчика 16, подав электрический сигнал на исполнительные механизмы крана.
Если ячейка стеллажа не занята, упор 13, не встретив препятствия, позволяет свободно установись груз 17 в ячейку стеллажа.
Так же устройство работает и с другой стороны крана-штабелера.
Поскольку пластинь при работе с бесконтактным датчиком входят в его щель, исключается точечный контакт элементов,
Q связанных с упорами, с датчиком. В случае установки контактного датчика повышается надежность, поскольку пластины скользят по ролику на всю его толщину, исключив точечный контакт управляющих элементов с датчиком. Таким образом, повышается надежность устройства.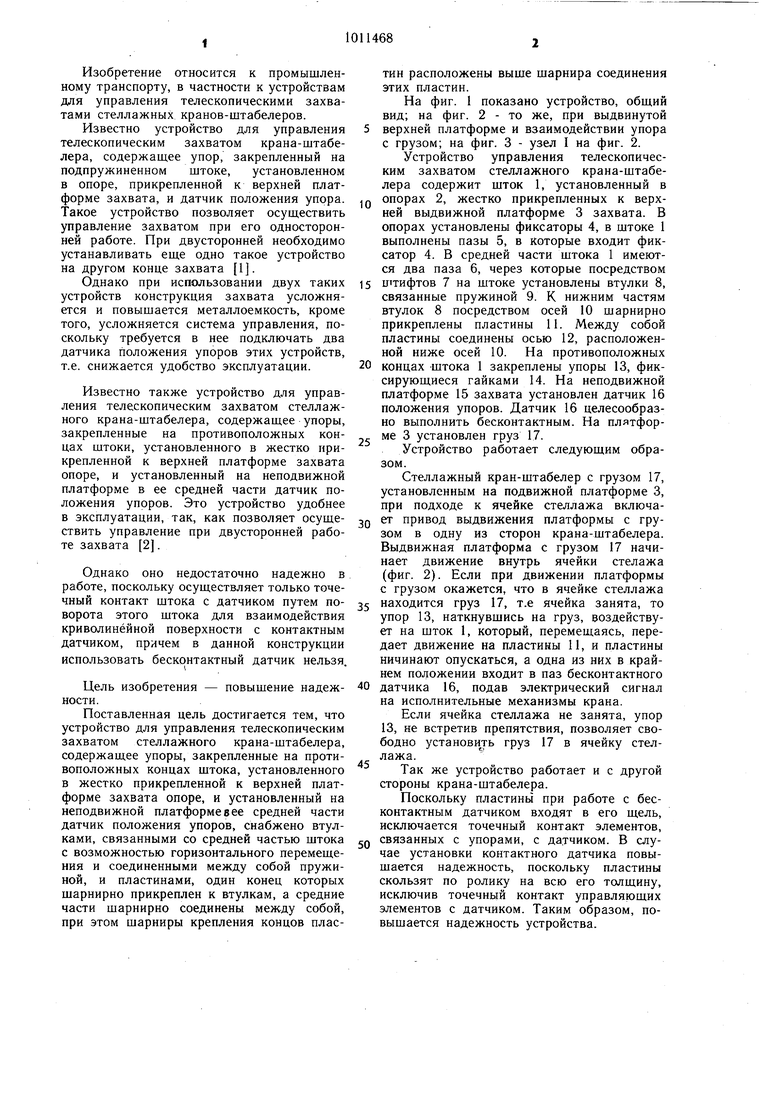
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1982 |
|
SU1082706A1 |
| Устройство для управления телескопическим захватом стеллажного крана-штабелера | 1986 |
|
SU1312019A2 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1988 |
|
SU1643341A1 |
| Устройство для управления телескопическим захватом стеллажного крана-штабелера | 1981 |
|
SU1000353A1 |
| Устройство для управления телескопическим захватом стеллажного крана-штабелера | 1981 |
|
SU1024393A1 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1982 |
|
SU1034929A1 |
| Устройство для контроля занятости ячейки стеллажного крана-штабелера | 1974 |
|
SU567648A1 |
| Кран-штабелер транспортно-накопительной системы | 1987 |
|
SU1615077A1 |
| Устройство для управления телескопическим захватом стеллажного крана-штабелера | 1982 |
|
SU1008156A1 |
| Устройство для ориентации платформы стеллажного крана-штабелера | 1982 |
|
SU1071535A1 |
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ТЕЛЕСКОПИЧЕСКИМ ЗАХВАТОМ СТЕЛЛАЖНОГО КРАНА-ШТАБЕЛЕРА, содержащее упоры, закрепленные на противоположных концах штока, установленного в жестко прикрепленной в верхней платформе захвата опоре, и установленный на неподвижной платформе в ее средней части датчик положения упоров, отличающееся тем, что, с целью повышения надежности, оно снабжено втулками, связанными со среднбй частью штока с возможностью горизонтального перемещения и соединенными между собой пружиной, и пластинами, один конец которых щарнирно прикреплен к втулкам, а средние части шарнирно соединены между собой, при этом шарниры крепления концов пластин расположены выше шарнира соединения эти пластин. (Л Oi оо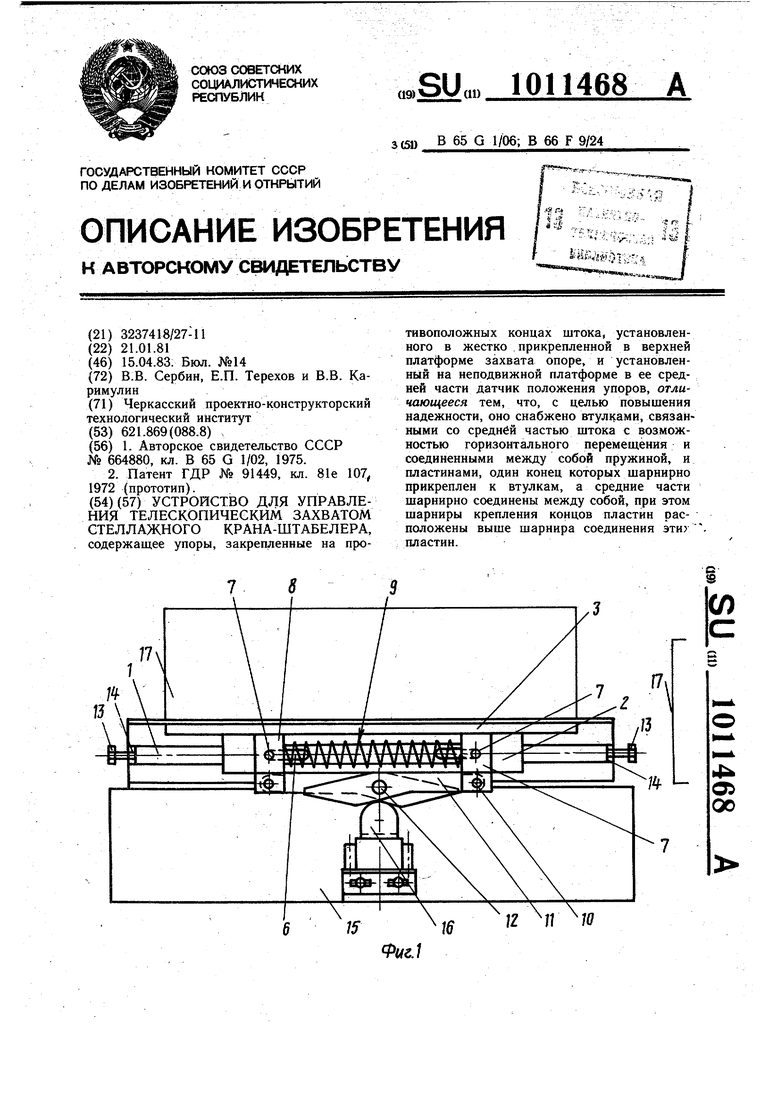
/ 5
Фиъ.З
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство контроля занятности ячейки | 1975 |
|
SU664880A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Дисковый широкозахватный лущильник | 1939 |
|
SU91449A1 |
| Горный компас | 0 |
|
SU81A1 |
