Изобретение относится к оборудованию складов, в частности к устройствам контроля занятости ячеек стеллажей, монтируемым на грузозахватных органах кранов-штабеле- ров.
Известно устройство для управления приводом телескопического захвата стеллажного крана-штабелера, содержащее подпружиненный в горизонтальном направлении шток, установленный в горизон- тальных направляющих на подвижной платформе. На подвижной платформе шар- нирно закреплен рычаг, взаимодействующий верхним плечом со штоком, а нижним -с копиром, установленным на не- подвижной платформе и подпружиненным в вертикальном направлении. На неподвижной платформе расположены два датчика,на один из которых воздействует шунт штока, а на другой - шунт, установленный на по- движной платформе.
Недостатком известной конструкции является ее сложность в изготовлении, монтаже и регулировке. Это связано с тем, что копир на неподвижной платформе подпру- жинен и поэтому требуется регулировка необходимого соотношения величин рабочих усилий пружин штока и копира для надежной работы устройства. Кроме того, возникновение дополнительных усилий при срабатывании устройства, связанных с воздействием рычага на подпружиненный копир, увеличивает силу, необходимую для срабатывания устройства. Это приводит к снижению чувствительности устройства, в связи с чем ограничивается область применения данного устройства и исключается возможность его применения при складировании легкой, например пластмассовой, тары.
Целью изобретения является и повышение его чувствительности путем упрощения конструкции копира и размещения дополнительного штока,
Указанная цель достигается тем, что известная конструкция, содержащая подпружиненный в продольном направлении шток, обращенный одним концом в сторону ячейки стеллажа и связанный с подвижной платформой, горизонтальные направляю- щие, закрепленные на подвижной платформе и ориентированные вдоль последней, шунт, закрепленный на противоположном конце штока с возможностью взаимодействия с датчиком, установленным на непод- вижной платформе телескопического захвата, второй шунт, закрепленный на подвижной платформе с возможностью взаимодействия со вторым датчиком, закрепленным на неподвижной платформе со
смещением относительно первого датчика на расстояние между осью первого шунта в его крайнем выдвинутом положении и осью второго шунта, и рычаг, шарнирно закрепленный на подвижной платформе с возможностью взаимодействия своим нижним плечом с верхней продольной и торцовой сторонами копира, закрепленного на неподвижной платформе, снабжена установленным с возможностью перемещения вдоль подвижной платформы в упомянутых горизонтальных направляющих дополнительным штоком, подпружиненным в продольном направлении и выполненным с имеющей поверхности сквозной продольной полостью, в которой расположен с возможностью контактирования с этими поверхностями и размещения его первого конца за габаритом соответствующего торца дополнительного штока основной шток, При этом копир закреплен на неподвижной платформе жестко, а рычаг размещен с возможностью контактирования его верхнего плеча с другим торцом дополнительного штока.
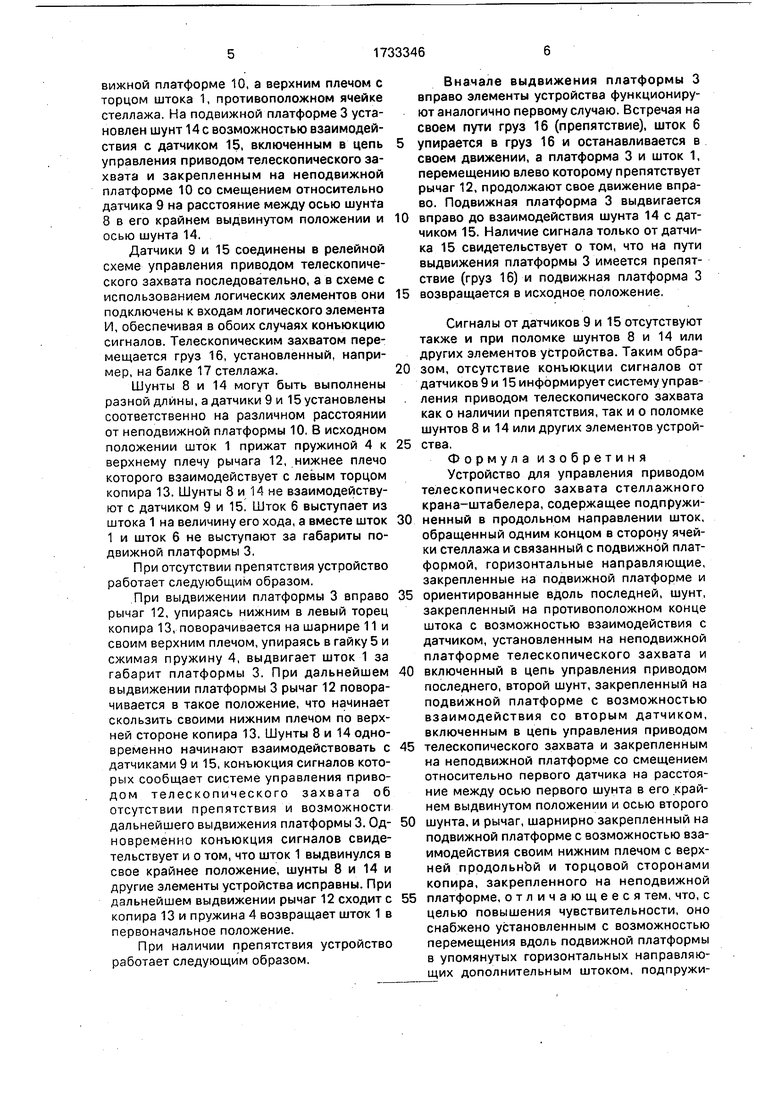
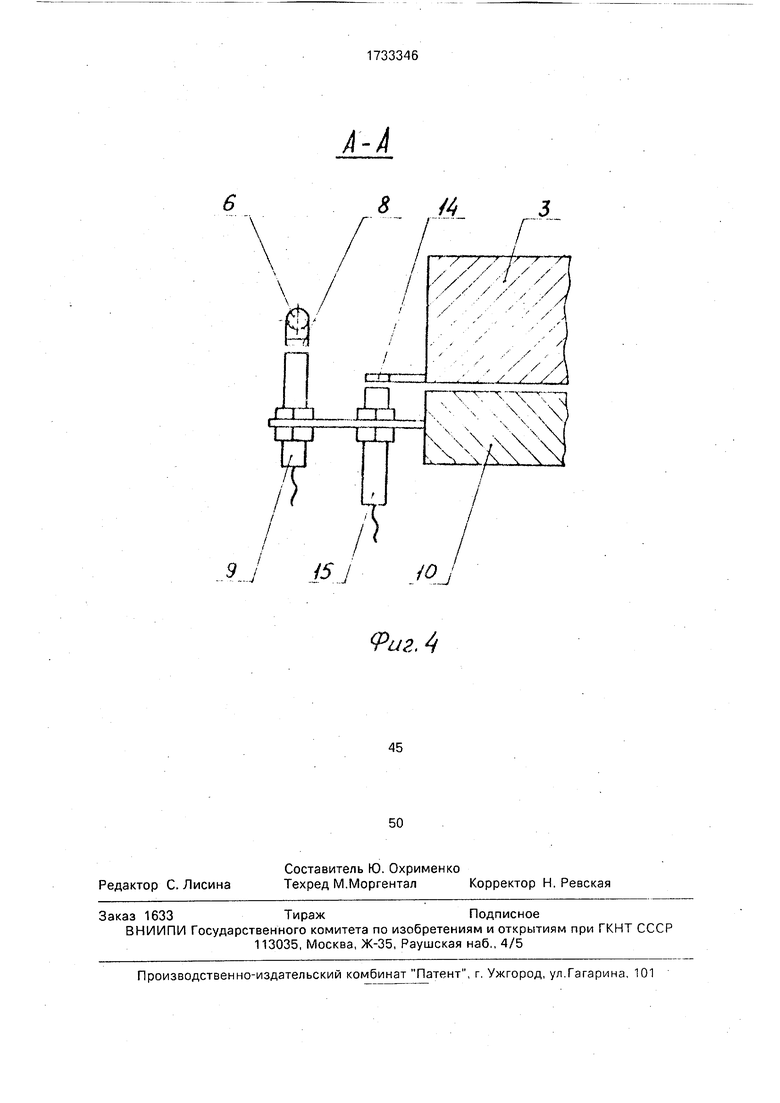
На фиг. 1 схематически изображено предлагаемое устройство, исходное положение; на фиг. 2 - положение элементов устройства при отсутствии препятствий; на фиг. 3 -то же, при наличии препятствия; на фиг. 4 - разрез А-А на фиг. 1.
Устройство для управления приводом телескопического захвата стеллажного крана-штабелера содержит шток 1, направляющие 2, закрепленные на подвижной платформе 3 телескопического захвата и ориентированные вдоль платформы 3. Шток
Iразмещен в направляющих 2 и подпружинен пружиной 4, рабочее усилие которой регулируется гайкой 5 на штоке 1. Последний выполнен с имеющей направляющие поверхности сквозной продольной полостью, в которой расположен с возможностью контактирования с этими поверхностями шток 6, подпружиненный в продольном направлении пружиной 7. Шток 6 обращен одним концом в сторону ячейки стеллажа и выходит этим концом за габарит соответствующего торца штока 1, а на другом конце штока 6 закреплен шунт 8, имеющий возможность взаимодействовать с датчиком 9. Последний 9 установлен на неподвижной платформе 10 телескопического захвата и включен в цепь управления приводом захвата.
На подвижной платформе 3 в шарнире
IIустановлен рычаг 12 с возможностью взаимодействия своим нижним плечом с верхней продольной и торцовой сторонами копира 13, жестко закрепленного на неподвижной платформе 10, а верхним плечом с торцом штока 1, противоположном ячейке стеллажа. На подвижной платформе 3 установлен шунт 14с возможностью взаимодействия с датчиком 15, включенным в цепь управления приводом телескопического захвата и закрепленным на неподвижной платформе 10 со смещением относительно датчика 9 на расстояние между осью шунта 8 в его крайнем выдвинутом положении и осью шунта 14.
Датчики 9 и 15 соединены в релейной схеме управления приводом телескопического захвата последовательно, а в схеме с использованием логических элементов они подключены к входам логического элемента И, обеспечивая в обоих случаях коньюкцию сигналов. Телескопическим захватом перемещается груз 16, установленный, например, на балке 17 стеллажа.
Шунты 8 и 14 могут быть выполнены разной длины, а датчики 9 и 15 установлены соответственно на различном расстоянии от неподвижной платформы 10. 8 исходном положении шток 1 прижат пружиной 4 к верхнему плечу рычага 12, нижнее плечо которого взаимодействует с левым торцом копира 13. Шунты 8 и 14 не взаимодействуют с датчиком 9 и 15, Шток 6 выступает из штока 1 на величину его хода, а вместе шток 1 и шток 6 не выступают за габариты подвижной платформы 3.
При отсутствии препятствия устройство работает следуюбщим образом.
При выдвижении платформы 3 вправо рычаг 12, упираясь нижним в левый торец копира 13, поворачивается на шарнире 11 и своим верхним плечом, упираясь в гайку 5 и сжимая пружину 4, выдвигает шток 1 за габарит платформы 3. При дальнейшем выдвижении платформы 3 рычаг 12 поворачивается в такое положение, что начинает скользить своими нижним плечом по верхней стороне копира 13. Шунты 8 и 14 одновременно начинают взаимодействовать с датчиками 9 и 15, конъюкция сигналов которых сообщает системе управления приводом телескопического захвата об отсутствии препятствия и возможности дальнейшего выдвижения платформы 3. Одновременно конъюкция сигналов свидетельствует и о том, что шток 1 выдвинулся в свое крайнее положение, шунты 8 и 14 и другие элементы устройства исправны. При дальнейшем выдвижении рычаг 12 сходит с копира 13 и пружина 4 возвращает штак 1 в первоначальное положение.
При наличии препятствия устройство работает следующим образом.
Вначале выдвижения платформы 3 вправо элементы устройства функционируют аналогично первому случаю. Встречая на своем пути груз 16 (препятствие), шток 6
упирается в груз 16 и останавливается в своем движении, а платформа 3 и шток 1, перемещению влево которому препятствует рычаг 12, продолжают свое движение вправо. Подвижная платформа 3 выдвигается
вправо до взаимодействия шунта 14 с датчиком 15. Наличие сигнала только от датчика 15 свидетельствует о том, что на пути выдвижения платформы 3 имеется препятствие (груз 16) и подвижная платформа 3
возвращается в исходное положение.
Сигналы от датчиков 9 и 15 отсутствуют также и при поломке шунтов 8 и 14 или других элементов устройства. Таким образом, отсутствие конъюкции сигналов от датчиков 9 и 15 информирует систему управления приводом телескопического захвата как о наличии препятствия, так и о поломке шунтов 8 и 14 или других элементов устройства.
Формула изобретиня Устройство для управления приводом телескопического захвата стеллажного крана-штабелера, содержащее подпружиненный в продольном направлении шток, обращенный одним концом в сторону ячейки стеллажа и связанный с подвижной платформой, горизонтальные направляющие, закрепленные на подвижной платформе и
ориентированные вдоль последней, шунт, закрепленный на противоположном конце штока с возможностью взаимодействия с датчиком, установленным на неподвижной платформе телескопического захвата и
включенный в цепь управления приводом последнего, второй шунт, закрепленный на подвижной платформе с возможностью взаимодействия со вторым датчиком, включенным в цепь управления приводом
телескопического захвата и закрепленным на неподвижной платформе со смещением относительно первого датчика на расстояние между осью первого шунта в его крайнем выдвинутом положении и осью второго
шунта, и рычаг, шарнирно закрепленный на подвижной платформе с возможностью взаимодействия своим нижним плечом с верхней продольн ой и торцовой сторонами копира, закрепленного на неподвижной
платформе, отличающееся тем, что, с целью повышения чувствительности, оно снабжено установленным с возможностью перемещения вдоль подвижной платформы в упомянутых горизонтальных направляющих дополнительным штоком, подпружиненным в продольном направлении и выполненным со сквозной продольной плоскостью, имеющей направляющие поверхности, в которой расположен с возможностью контактирования с этими поверхностями и размещения его первого конца за габаритом
соответствующего торца дополнительного штока основной шток, при этом копир закреплен на неподвижной платформе жестко, а рычаг размещен с возможностью контактирования его верхнего плеча с другим торцом дополнительного штока.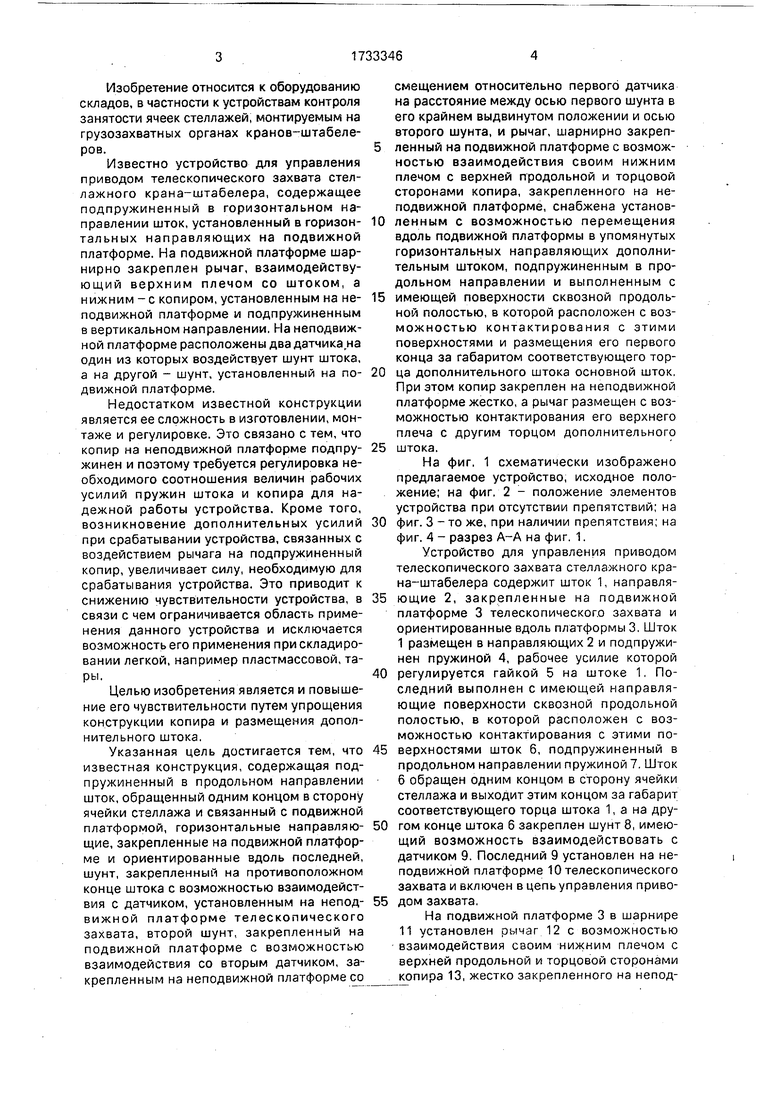
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1986 |
|
SU1384481A1 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1988 |
|
SU1518229A2 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1988 |
|
SU1594079A1 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1985 |
|
SU1341122A2 |
| Устройство для управления приводом выдвижения телескопического захвата стеллажного крана-штабелера | 1982 |
|
SU1062138A1 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1985 |
|
SU1306852A1 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1988 |
|
SU1643341A1 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1982 |
|
SU1034929A1 |
| Устройство для управления приводом выдвижения телескопического захвата стеллажного крана-штабелера | 1985 |
|
SU1331747A1 |
| Устройство для управления телескопическим захватом стеллажного крана-штабелера | 1982 |
|
SU1008156A1 |
Изобретение относится к оборудованию складов, в частности к устройствам контроля занятости ячеек стеллажей, монтируемых на грузозахватных органах кранов-штабе- леров. Сущность изобретения: устройство содержит дополнительный шток 1, установленный в направляющих 2 вдоль подвижной платформы 3, подпружиненный пружиной 4, рабочее усилие которой регулируется гайкой 5. В продольной полости штока 1 распоJ 8 /S ложен шток 6, подпружиненный пружиной 7. Внешний конец штока 6 находится за габаритом соответствующего торца штока 1. На другом конце штока 6 закреплен шунт 8, взаимодействующий с датчиком 9. На платформе 3 закреплен шунт 4, взаимодействующий с датчиком 15. Датчики 9 и 14 включены в цепь управления приводом, и установлены на неподвижной платформе 10, на которой жестко закреплен копир 13. На платформе 3 в шарнире 11 закреплен рычаг 12, взаимодействующий верхним плечом с торцом штока 1, а нижним - с верхней стороной и торцом копира 13. При выдвижении платформы 3, при наличии препятствия (груза 16), нижнее плечо рычага 12 перемещается по верхней стороне копира 13, рычаг 12 поворачивается и верхним плечом выдвигает шток 1. Шток 6, выдвинутый относительно штока 1, упирается в груз 16 и останавливается. Платформа 3 продолжает выдвижение до совмещения шунта 14 с датчиком 15. 4 ил. со СО CJ со J о 17
3
//
5 4 2 7
«OS
А-А
tii
Ј0
/
У
. У
# У
S /4
-7 / /Р/
/ х
/ /
/ / /
/ /
/
, / / л
j.-.
т
/ /
Фиг. 4
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1986 |
|
SU1384481A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
