113120582
Изобретение относится к строитель-его лапы устанавливались на 10-20 мм
но-монтажным работам, в частности квыше опорных конструкций, на которые
устройствам для установки аппаратов,аппарат должен быть установлен (лапы
требующих при монтаже перевода из го-и опорные конструкции не показаны),
ризонтального в вертикальное положе- 5Затем через траверсу 4 аппарат строние и наведение их на опорные конст-пят к полиспасту 3 за серьги 6, гибрукции с высокой точностью.кие тяги 9 верхними концами закрепляЦель изобретения - повышение удоб-ют к подвескам 10, а втулки 8 гибких
ства эксплуатации в стесненных уело-тяг 9 надевают на цапфы 7 аппарата и
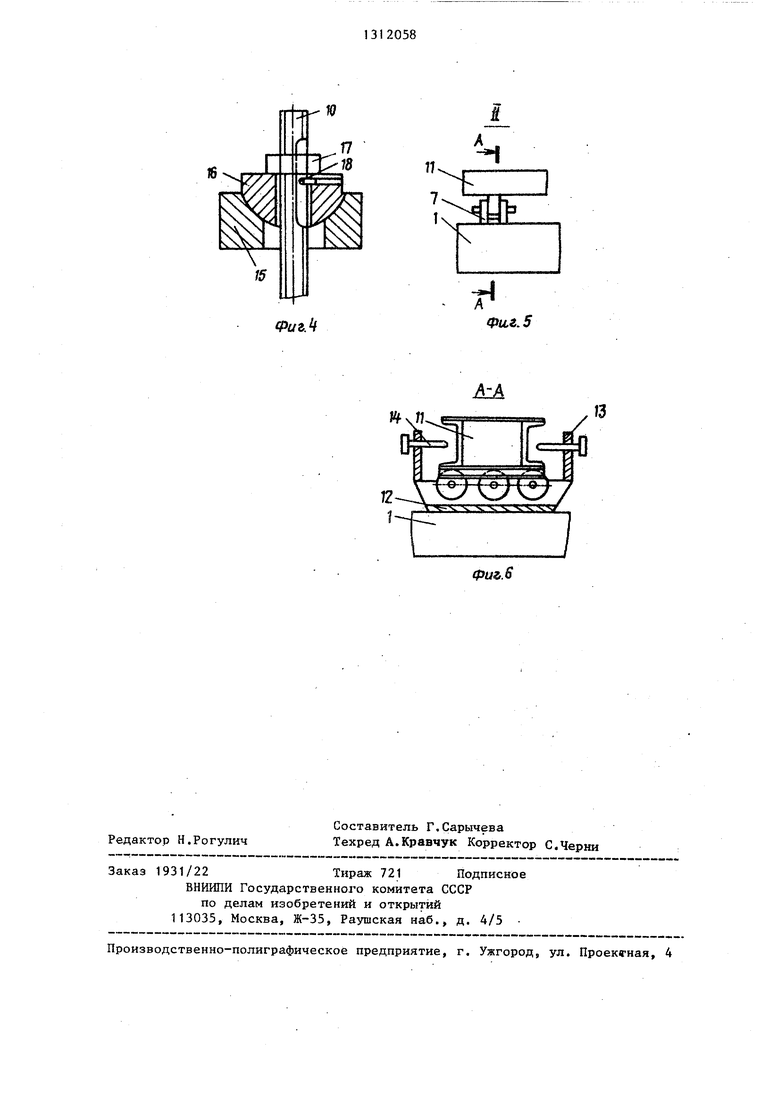
ВИЯХ. Офиксируют длину гибких тяг в натянуНа фиг.1 представлено грузоподъем-том состоянии зажимами 21, которые ное устройство, общий вид; на фиг.2 -закреплены к гибким тягам для регули- схема строповки аппарата, исходноерования их длины. После этого создают положение; на фиг.З - узел I на фиг.1;усилие на полиспаст 3, опускают домк- на фиг.4 - установка фиксатора; на 5раты 20 и удаляют транспортное сред- фиг. 5 - узел II на фиг.2; на фиг.6 -ство 19. Нагрузки от массы аппарата разрез А-А на фиг.З.передаются на гибкие тяги 9 и полиГрузоподъемное устройство содержитспаст 3. Для вывода аппарата 5 в вер- размещенную на пролетных балках те-тикальное положение стягивают полислежку 1, на которой установлен ри- 20паст, при этом цапфы 7 проворачивают- гель 2 с закрепленным к нему полис-ся во втулках 8. Учитывая, что прак- пастом 3, который снабжен траверсойтически не удается изготовить аппарат 4 для строповки аппарата 5 за серьгис расчетным положением центра массы 6. К каждой цапфе 7 аппарата с помо-на вертикальной оси аппарата, точка щью втулки 8 закреплен гибкий элементО фактически переместится в точку О, . в виде тяги 9, свободный конец кото-При этом возникает момент, равный рой через подвеску 10 соединен с уз-произведению массы аппарата Р на лом крепления тяги 9 на тележке 1,эксцентриситет е, что приводит к отк- выполненным в виде балки 11, установ-лонению оси аппарата и его образую- ленной на закрепленной на тележке 1 от вертикали. роликовой обойме 12. Последняя снаб-I
жена косынками 13 с ограничителями неравномерного растяжения
14 перемещения балки 11. На верхнем « ДР элементов такеторце балки 11 установлена полусфери- «°« оснастки происходит, перемещеческая опора в виде подпятника 15 (самоустановка) балок 11 на ролис полусферическим шарниром 16. В обойме 12 вдоль или под углом
лежке 1, роликовой обойме 12, балке пролетному строению, а за счет сме11, подпятнике 15 и полусферическомЩ полусферического шарнира 16 отшарнире 16 выполнено сквозное отвер-носительно подпятника 15 - самоустастие, через которое пропущена подвес- 40«овка гибких тяг 9 в плоскости, пер- ;
ка 10, имеющая с наружной стороныпендикулярной плоскости фиг.1, а
полусферического шарнира 16 регули- дополнительная корректировка
ровочную гайку 17. Сквозное отверс-положения балок 11 на роликовых обойтие 5 балке имеет форму паза, вытя-мах 12. После этого балки 11 фиксирунутого по оси тележки 1 перпендику- 45« ограничителями 14. и перемещают
лярно направлению перемещения балки.пролетное строение 1 к опорным констВ полусферическом шарнире 16 перпен-РУКЦИям под аппарат 5. Для ликвидации
дикулярно его вертикальной оси выпол-невертикальнюсти оси (образующей) апнено резьбовое отверстие под фикса- Р обеспечения точного
тор 18, входящий в продольный паз в 50наведения лап аппарата на опорные
теле подвески 10.конструкции меняют длину гибких тяг
I 9 вращением гаек 17. Благодаря взаиУстройство работает следующим об-модействию фиксатора 18, ввернутого
разом.в полусферический шарнир 16, с проАппарат 5 в горизонтальном положе- дольным пазом в резьбовой части поднии подают на транспортном средствевески 10 прн вращении гайки 17 проис19 в зону действия устройства и дом- .ходит поступательное перемещение подкратами 20 приподнимают так, чтобывески 10, что предотвращает закручипри выводе в вертикальное положениевание гибких: тяг 9 при изменении их
длин в процессе наведения аппарата на опорные конструкции. При наведении аппарата одновременно с изменением длины Гибких тяг 9 производят ослабление полиспаста 3.
Формула изобретения
1. Грузоподъемное устройство, содержащее тележку, размещенную на пролетных балках, грузоподъемный полиспаст, привод которого смонтирован на раме тележки и который снабжен приспособлением для сцепления с грузом, и гибкие элементы, верхними концами связанные с рамой тележки я имеющие на нижних крнцах элементы сцепления с захватными элементами грузов, выполненные с возможностью поворота относительно последних, о т л и ч а ю щ е е с я тем, что, с целью повышения удобства эксплуатации в стесненных условиях, связь верхних концо гибких элементов с рамой тележки содержит подвижные поперек рамы балки и размещенные в верхней части последних полусферические опоры, первые из которых выполнены с расположенными перпендикулярно перемещению балок сквозными пазами, а вторые - со сквозными отверстиями для размещения в ,них верхних концов гибких элементов, при этом полусферические опоры снабжены элементами фиксации в них верхних концов гибких элементов, а на раме тележки закреплены фиксаторы положений балок.
2. Устройство по П.1, отличающееся тем, что балки установлены на закрепленных на раме тележки роликах.
13 Фиг.2
Ю
Фиг.
| название | год | авторы | номер документа |
|---|---|---|---|
| Консольный кран для монтажа блоков | 1987 |
|
SU1602852A1 |
| СБОРНО-РАЗБОРНЫЙ КОНСОЛЬНЫЙ КРАН | 2021 |
|
RU2774693C1 |
| Мосто-башенный кран | 1981 |
|
SU969646A1 |
| Мостовой кран для подъема грузов | 1979 |
|
SU787344A1 |
| Грузоподъемное устройство для монтажа оборудования | 1988 |
|
SU1532528A1 |
| Система для монтажа мостового крана | 1990 |
|
SU1752715A1 |
| ШЛЮЗОВОЙ КРАН ДЛЯ УСТАНОВКИ ПРОЛЕТНЫХ СТРОЕНИЙ ЖЕЛЕЗНОДОРОЖНОГО МОСТА | 2002 |
|
RU2225829C2 |
| Монтажное устройство | 1980 |
|
SU925856A1 |
| Самомонтирующийся козловой кран | 1990 |
|
SU1794870A1 |
| Устройство для подачи грузов в труднодоступные места | 1982 |
|
SU1057397A1 |
Изобретение относится к строительно-монтажным работам и предназначено для подъема и поворота аппаратов при их монтаже. Цель изобретения - повьшение удобства эксплуатации в стесненных условиях. Грузоподъемное устройство содержит установленную на пролетных балках тележку 1, полиспаст, привод которого смонтирован на ее раме и который снабжен приспособлением для сцепления с грузом, гибкие элементы в виде тяг 9, связанные верхними концами.с рамой тележки 1, а нижними посредством элементов сцепления в ввде втулок - с цапфами грузов. Тяги 9 связаны с рамой тележки 1 подвижными балками 11, установленными на роликовой обойме 12, и полусферическими опорами в виде подпятников 15 с полусферическими шарнирами 16. При подъеме груза его масса передается на тяги 9 и полиспаст. Из-за неравномерного растяжения тяг 9 происходит перемещение и самоустановка балок 11 и самоустановка элементов тяг 9. 1 з.п. ф-лы. 6 ил. с S (Л 16 к со «iA ГС ел 00 Фи.ъ.З
Редактор Н.Рогулич
Составитель Г.Сарычева
Техред А.Кравчук Корректор С.Черни
Заказ 1931/22Тираж 721 Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Фиъ.б
| Кран-кантователь | 1973 |
|
SU470475A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
