.4
18
Изобретение относится к машинострое- яи,.), в .РС .Н.ЭСТИ к автоматизации произ- во дс г зе к к ь х п р о цессо в.
Мелью изобретения является повышение нйде кностй за счет уменьшения возможности заклинивания пальца.
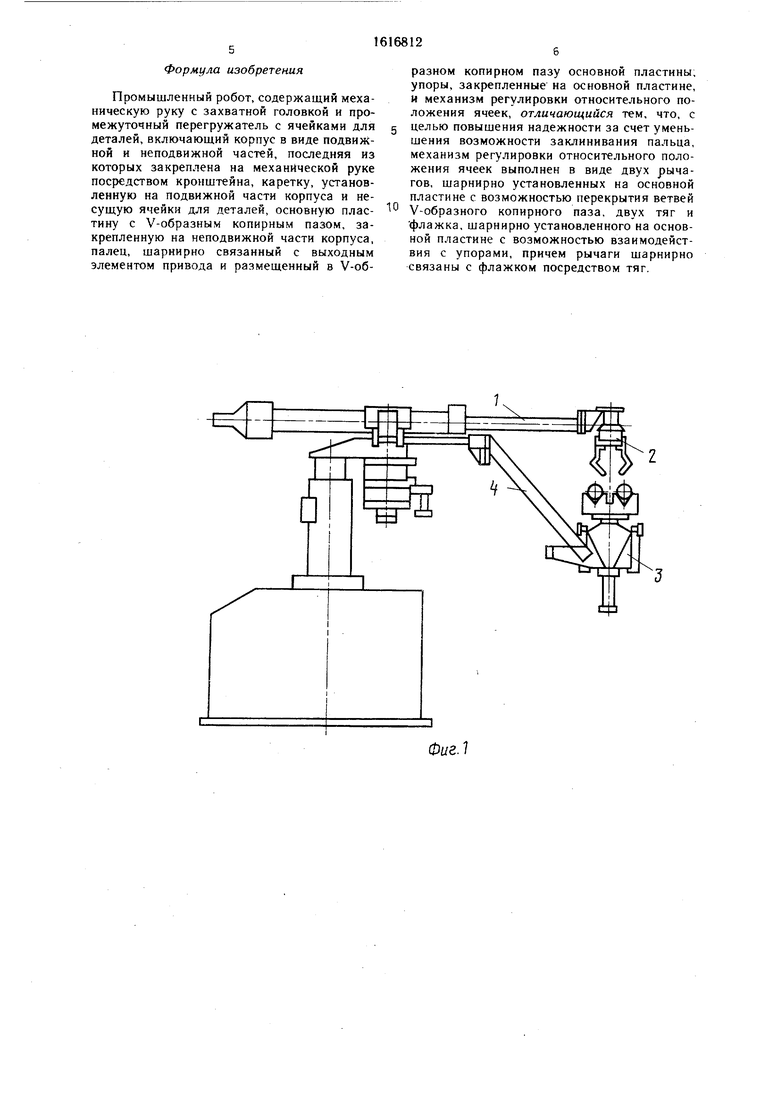
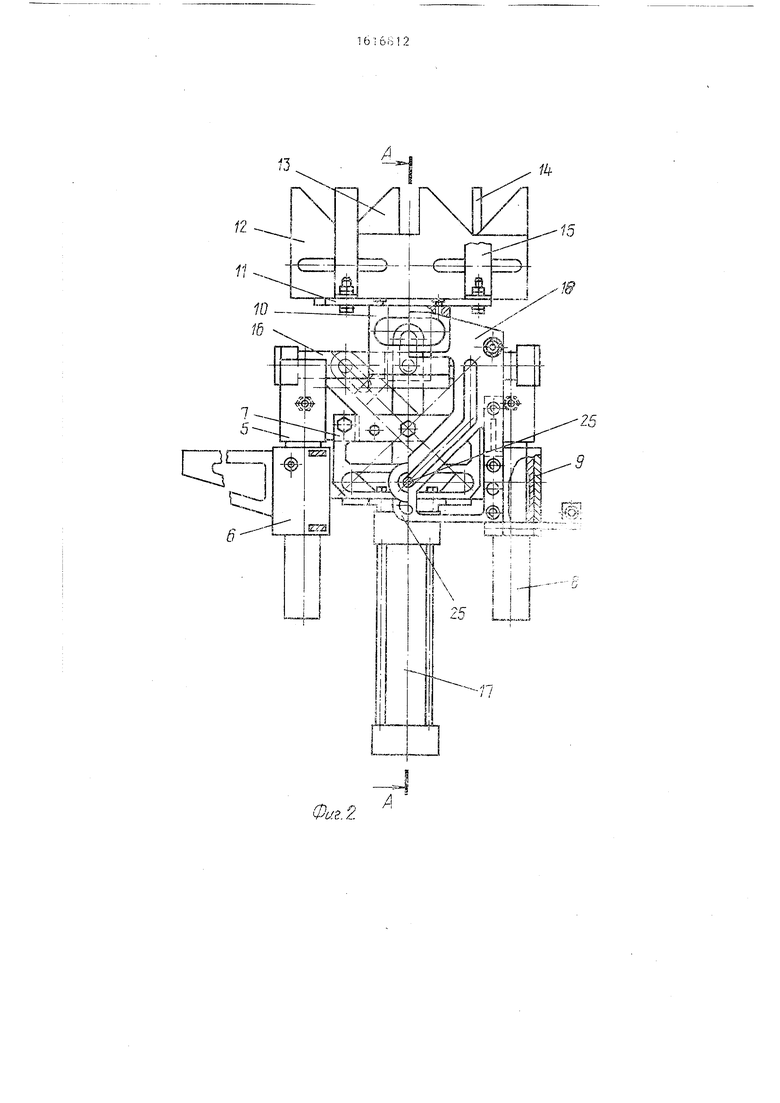
На фиг. i схематично изо(5ражен предлагаемый промышленный робот с перегружателем; на фиг. 2 - перегружатель; на фиг. 3 - разрез А-А на фиг. 2; на фиг. 4 - вид Б на фиг. 3.
Промышленный робот содержит механическую руку 1 с захватной головкой 2 и промежуточный перегружатель 3 с ячейками для деталей. Промежуточный перегружатель 3 посредством кронштейна 4 установлен на одной из подвижных частей механической руки 1. Промежуточный перегружатель 3 содержит корпус, состоящий из подвижной части 5 и неподвижкой 6, после.а- няя из которых жестко связ; : а с кронштей ном 4. Для перемещения подвижной части 5 коЪпуса с закрепленной яа ней промежуточной пластиной 7 относительно неподвижной части 6 корпуса служат вертикальные колонки 8 с напра зляющими втулками 9. На подвижкой части 5 корпуса установлена рсарет- ка 10. Па каретке 10 закреплен кронштейн П, на котором монтируются две пластяны 12 и 13, образующие ячейки для укладки де- :а,лсй, габаритные пластины 4 и габаритные п.лас-г 5нчатые пружины 15. Каретка 10 уста- нон.пема с возможностью горизонтальног о перемещения по направляющим колонкам 16. При зтом, за счет поперечного перемеще- 11н; относительно одна другой пластин 12 и 13, а также иродо.Г:Ьного перемещения габаритных пластин 14 и габаритных тинчатых пружин 15 производится настройка промежуточного перегру:.катал5 3 на различные ткаоразмерь деталей.
На непо.тзижной части 6 корпуса установлен -аривсд 17, основная пластина 18 с V-образным копирным пазом, а также механизм оегулировки относительного положения ячеек по отношению к захватной головке 2. Механизм регулировки отнссительгюго положения 5;чсек состоит из двух рычагов 19, расположенных зеркгитьно по отношению один к другому, щарниргЮ установленных на основной пластине 18 посредством винтов 20 и соединенных с флажком 21 и между собой тягами 22, которые прикреплены к рычагам 19 и флажку 21 винтамя 23. Флажок 2 на основ ой пластине 18 установлен щарнирно на винте 20. В крайних положениях флажок 21 опирается на упоры 24, закрепленные на основной пластине 18. Промежуточная пластина 7 выпол.иена с горизонтальным пазом, в котором ЮДБИЖНО вдо,;ь оси установлен палец 25. Палец 25 одним концом взаимодействует с V-образным копирным пазом основной пластины 13, а также с рычагами 19 и флажком 21, а другим концом - с водилом 26, щарнирно установленным на
пальце 27, соединяющим выходной элемент 28 привода 17 с подвижной частью 5 корпуса промежуточного перегружателя 3. Водило 26 взаимодействует одним концом с пальцем 25, а другим с кареткой 10. Промышленный робот работает следующим образом.
При включении силового цилиндра привода 17 шток через выходной элемент 28 и цалец 27 воздействует на подвижную часть 5 корпуса промежуточного перегружателя 3. Подвижная часть 5 корпуса промежуточного перегружателя 3 посредством колонок 8 и направляющих втулок 9 совершает возвратно-поступательное дви 5 имение При движении штока привода 17 вверх палец 27 с водилом 26, подвижная иасть 5 корпуса с промежуточной пластиной 7 и установленным в ее горизонтальном пазу пальцем 25 также двигаются вверх. При этом один из рычагов 19 перекрывает 0 ту ветвь V-образного копирного паза на основной пластине 18, по которой будет двигаться палец 25. Палец 25 поднимается, при этом одним своим концом он движется по ветви V-образного копирного паза на основ- г. чой пластине 18 и одновременно воздей- ствует на рычаг 19, который, отклоняясь под действием пальца 25, перебрасывает флажок 21 в другое крайнее положение, а другой рычаг 19 перекроет нерабочую ветвь V-образного копирного паза основной пласти- 30 ны 18.
Одновременно второй конец пальца 25 взаимодействует с водилом 26, поворачивая его вокруг пальца 27. Водило 26 перемещает каретку 10 по направляющим колон- ос кам 16. В результате один из двух рядов ячеек для укладки деталей входит в зону захватной головки 2 и совмещается с ее осью. Захват захватной головки 2 сжимается или разжимается и соответственно забирает или укладывает деталь в ячейки промежуточного 40 перегружателя 3. При движении щтока привода 17 вниз все механизмы промежуточного перегружателя 3 возвращаются в исходное положение, а палец 25 по флажку 21 переместится в конце движения в другое начальное положение, из которого палец 25 при следующем движении щтока привода 17 вверх будет взаимодействовать с другой ветвью V-образного копирного паза на основной пластине 18.
В результате следующего движения вверх в зону механизма захвата войдет следующий ряд ячеек для деталей.
При этом наличие габаритных пластин-, чатых пружин 15 обеспечивает стабильность размеров деталей от базы (габаритных пластин) до оси механической руки про- мыщленного робота при использовании его в загрузочно-разгрузочных операциях на металлорежущем оборудовании.
Формула изобретения
Промышленный робот, содержащий механическую руку с захватной головкой и промежуточный перегружатель с ячейками для деталей, включающий корпус в виде подвижной и неподвижной частей, последняя из которых закреплена на механической руке посредством кронщтейна, каретку, установленную на подвижной части корпуса и несущую ячейки для деталей, основную пластину с V-образным копирным пазом, закрепленную на неподвижной части корпуса, палец, шарнирно связанный с выходным элементом привода и размещенный в V-об0
разном копирном пазу основной пластины, упоры, закрепленные на основной пластине, и механизм регулировки относительного положения ячеек, отличающийся тем, что, с целью повышения надежности за счет уменьшения возможности заклинивания пальца, механизм регулировки относительного положения ячеек выполнен в виде двух рычагов, шарнирно установленных на основной пластине с возможностью перекрытия ветвей V-образного копирного паза, двух тяг и флажка, шарнирно установленного на основной пластине с возможностью взаимодействия с упорами, причем рычаги шарнирно связаны с флажком посредством тяг.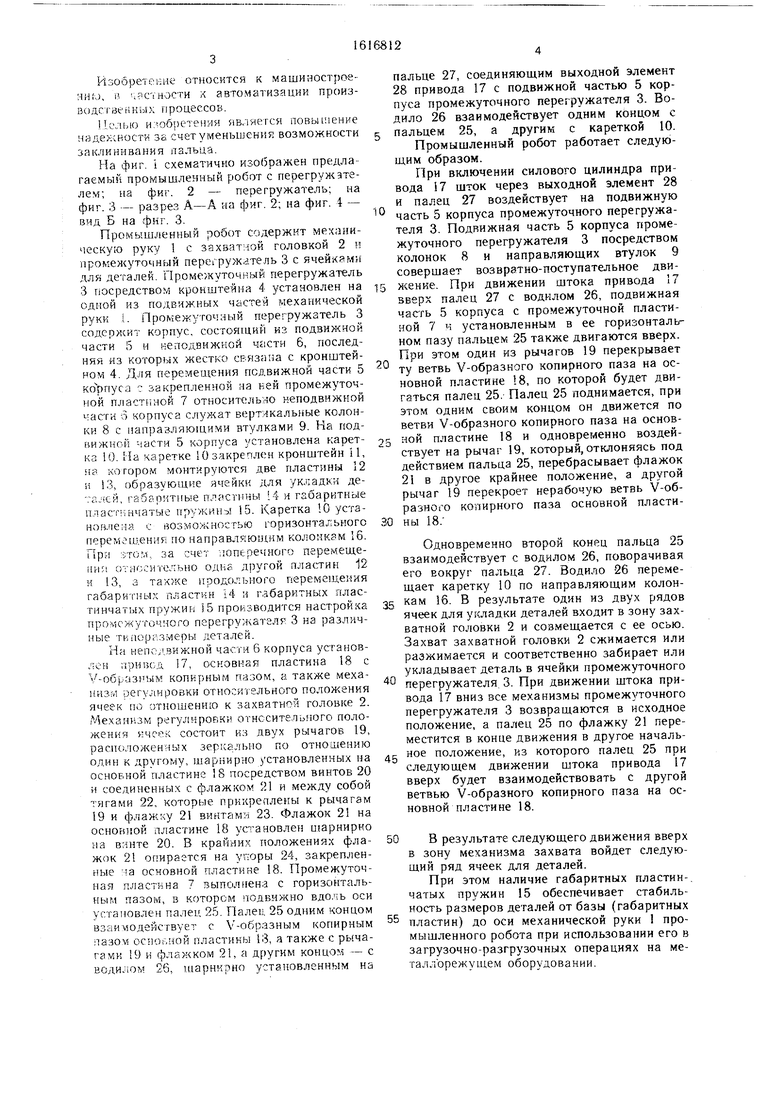
| название | год | авторы | номер документа |
|---|---|---|---|
| Промышленный робот | 1988 |
|
SU1530436A1 |
| Промышленный робот | 1986 |
|
SU1335446A1 |
| Устройство для перегрузки конусов электронно-лучевых трубок с транспортера печи отжига | 1990 |
|
SU1839168A1 |
| Грузозахватное устройство | 1989 |
|
SU1768492A2 |
| Устройство для подачи и отбраковки упаковываемых предметов | 1987 |
|
SU1495211A2 |
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| Конвейерная система линии технологической обработки | 1989 |
|
SU1728102A1 |
| Устройство для резки профильного проката | 1980 |
|
SU944834A2 |
| Автоматическая линия для упаковывания ампул | 1987 |
|
SU1521663A1 |
| Робот к штамповочному прессу | 1982 |
|
SU1127674A1 |
Изобретение относится к области машиностроения, в частности к автоматизации производственных процессов. Целью изобретения является повышение надежности за счет уменьшения возможности заклинивания. Для этого палец, перемещаясь по одной из ветвей V-образного копирного паза основной пластины, взаимодействует с рычагом 19 механизма регулировки относительного положения ячеек, отклоняет его и поворачивает связанный с ним посредством тяги 22 флажок 21 до взаимодействия с одним из упоров 24. В результате ось одной ячейки совмещается с осью захвата захватной головки. 4 ил.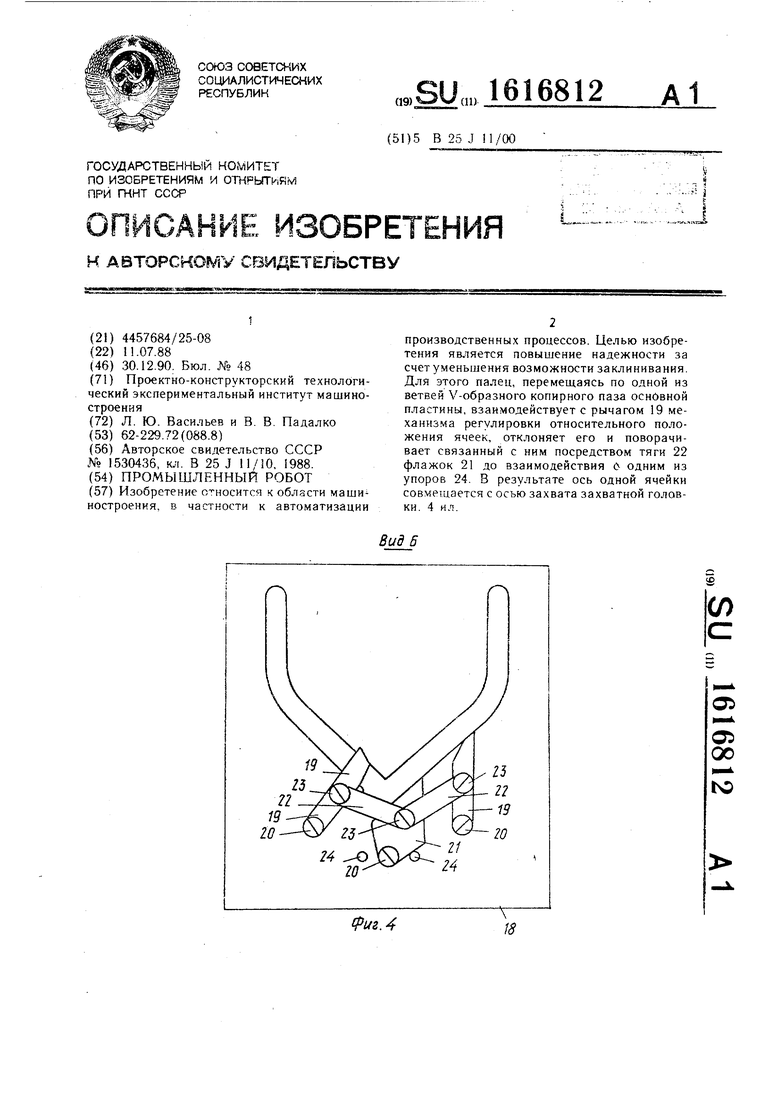
ГС-1-j
f,3
Фиг.2.
/4
-А
PusJ
| Промышленный робот | 1988 |
|
SU1530436A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
