Изобретение относится к машиностроению, а именно к робототехнике, и предназначено для захвата и ориентирования чашеобразных заготовок с эксцентрично расположенным отверстием в основании.
Цель изобретения - упрощение конст- |)укции и уменьшение габаритов путем сочетания во вращаюндейся головке схвата и ориентирующего ловителя.
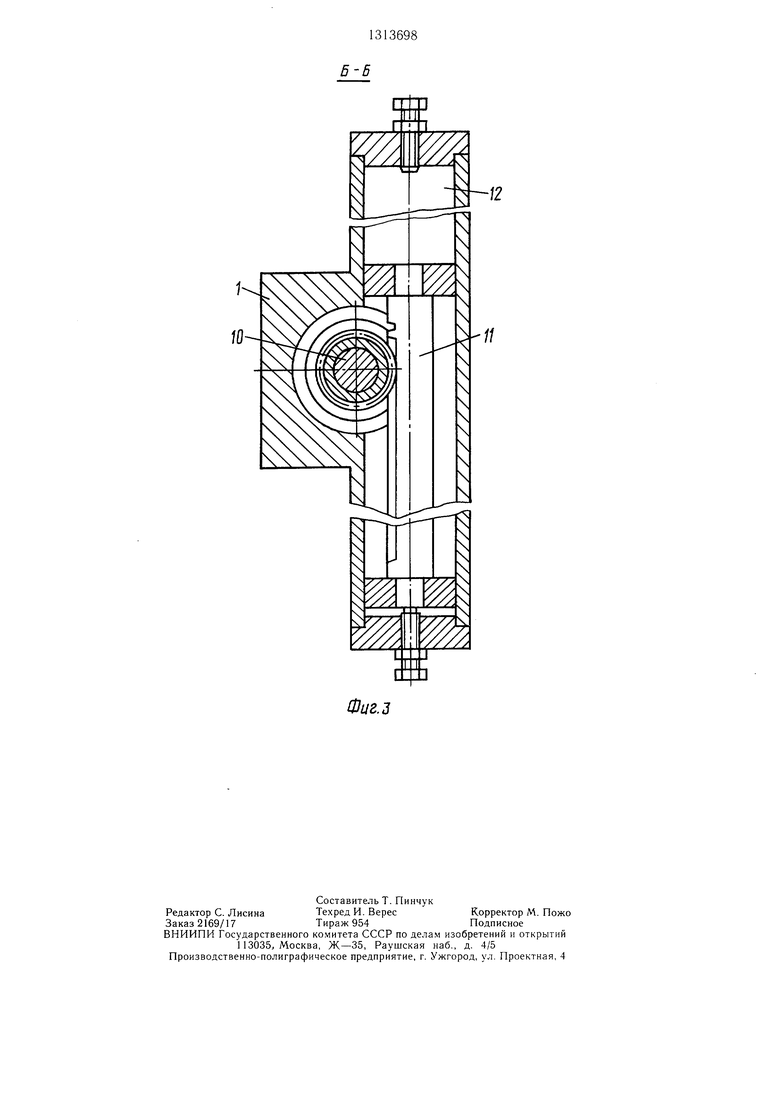
На фиг. 1 схематически показана предлагаемая головка манипулятора, вид сбоку, разрез; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1.
Головка манипулятора содержит корпус, состоящий из двух частей 1 и 2. В корпу- се на шарикоподшипниках установлен цилиндрический стакан 3 с захватным органом 4. Внутри стакана 3 на щпонке 5 с возможностью осевого перемещения размещен подпружиненный при помощи пружины б ловитель 7 с пальцем 8 и роликом 9 на его конце. Внутри полого ловителя 7 расположен плунжер 10 с круговой вытяжкой на конце, при помощи которой осуществляется привод захватного органа 4. Ловитель 7 находится в зубчатом зацеплении с рейкой 11, связанной с встроенным силовым цилиндром 12. Плунжер 10 привода захватного органа 4 является удлиненным щто- ком силового цилиндра 13. Головка манипулятора установлена на механизмы горизонтального и вертикального перемещения (не показаны).
Манипулятор работает следующим образом.
Механизм горизонтального перемещения подает головку манипулятора в переднее положение. При этом ролик 9 на пальце 8 ловителя 7 упирается в дно заготовки 14 и, преодолевая сопротивление пружины 6, отжимает ловитель 7. Рейка 11 начинает поворачивать ловитель 7 и находящийся с ним в щпоночном соединении стакан 3 с захватным органом 4 до совершения ими полного оборота. При повороте ловителя 7
б и
0
0 5
5
0
0
ролик 9 попадает в отверстие на дне заготовки и под воздействием пружины 6 входит с пальцем 8 в отверстие. Дальнейший поворот ловитель 7 совершает совместно с заготовкой. При заскакивании пальца 8 ловителя 7 в отверстие заготовки от датчика срабатывает воздухораспределитель силового цилиндра 13. Плунжер 10 выдвигается вперед, осуществляя захват заготовки 14 захватным органом 4.
По завершении полного оборота заготовка в захватном органе находится в заданном ориентированном положении. Механизм горизонтального перемещения отводит головку с заготовкой назад, механизм вертикального перемещения опускает ее, а затем механизм горизонтального перемещения выдвигает заготовку в переднее положение и прижимает к базовой поверхности зажимного устройства, где после фиксации захватный орган освобождает заготовку отводом назад плунжера 10. С переводом головки манипулятора в верхнее положение цикл повторяется.
Выполнение манипулятора с головкой, объединяющей в себе ориентирующий и зажимной механизмы при обеспечении функции установки заготовки на позицию обработки, повышает компактность устройства и упрощает его конструкцию.
Формула изобретения
Захватно-ориентирующая головка манипулятора, содержащая корпус, захватный орган с приводом и вращающийся подпружиненный ловитель, отличающаяся тем, что, с целью упрощения конструкции и умень- щения габаритов, она выполнена в виде ко- аксиально расположенных в корпусе стакан с захватным органом и ловителя, на торце которого установлен палец с роликом, при этом ловитель смонтирован с возможностью поступательного перемещения относительно стакана и с возможностью вращения относительно корпуса совместно со стаканом.
S
Фиг.г.
Фцг.з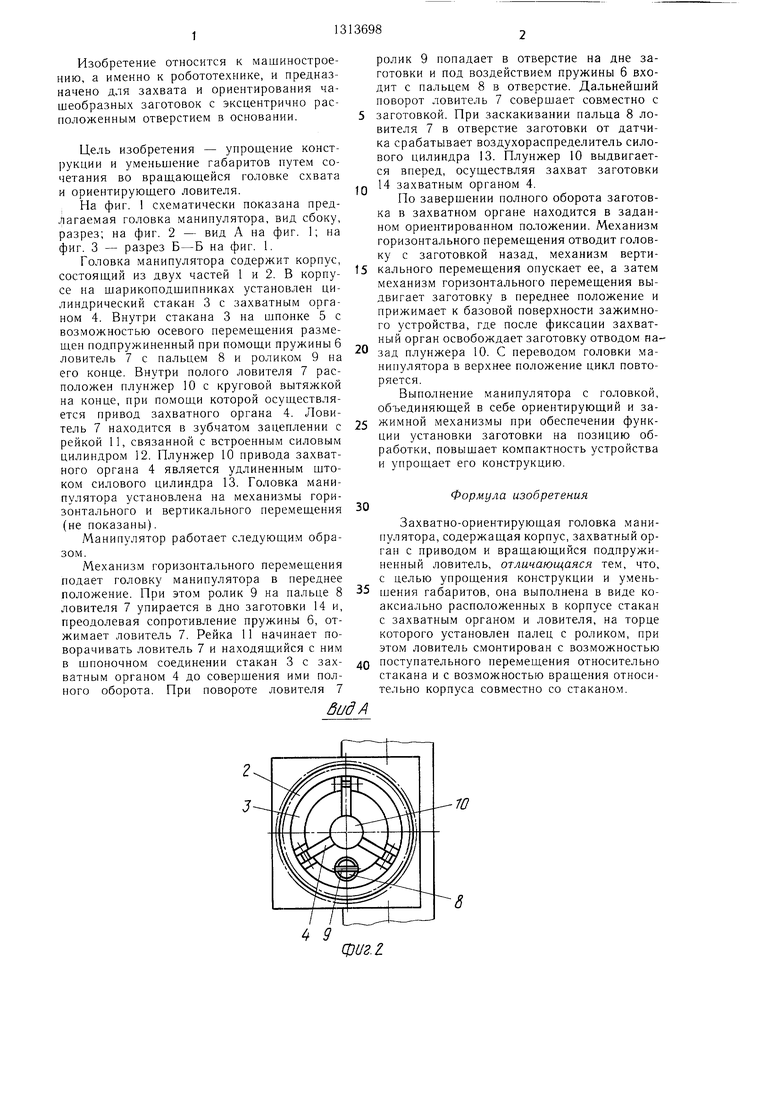
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватная головка манипулятора | 1986 |
|
SU1342727A1 |
| Автоматизированный комплекс для штамповки | 1985 |
|
SU1328036A1 |
| Устройство для отделения плоской заготовки от стопы и подачи ее к обрабатывающей машине | 1987 |
|
SU1416242A1 |
| Автоматическая линия для изготовления деталей типа топоров | 1989 |
|
SU1727945A1 |
| Устройство для прокатки колец шарикоподшипников | 1988 |
|
SU1803240A1 |
| Манипулятор | 1982 |
|
SU1045992A1 |
| Автоматизированный участок механической обработки изделий с центральным отверстием | 1983 |
|
SU1073077A1 |
| Устройство для запрессовки втулок с боковым отверстием в поворотные кулаки автомобилей | 1987 |
|
SU1532271A1 |
| Устройство для подачи деталей | 1984 |
|
SU1204305A1 |
| Устройство для резки тонкостенных труб | 1989 |
|
SU1687381A2 |
Изобретение относится к машиностроению, а именно к робототехнике, и предназначено для захвата и ориентирования чашеобразных заготовок с эксцентрично расположенным отверстием на дне. Цель - упрощение конструкции и уменьшение габаритов. Головка манипулятора, преодолевая сопротивление пружины 6, подается к заготовке до упора роликом 9 на пальце 8 ловителя 7. Рейка поворачивает ловитель 7 и соединенный шпонкой 5 стакан 3 с захватным органом 4 до совершения ими полного оборота. При этом ролик 9 попадает в отверстие заготовки. По сигналу датчика срабатывает силовой цилиндр 13, плунжер 10 выдвигается вперед, осуществляя захват заготовки 14 захватным органом 4. 3 ил. 74 (Л со со Oi со 00 /J фг/.f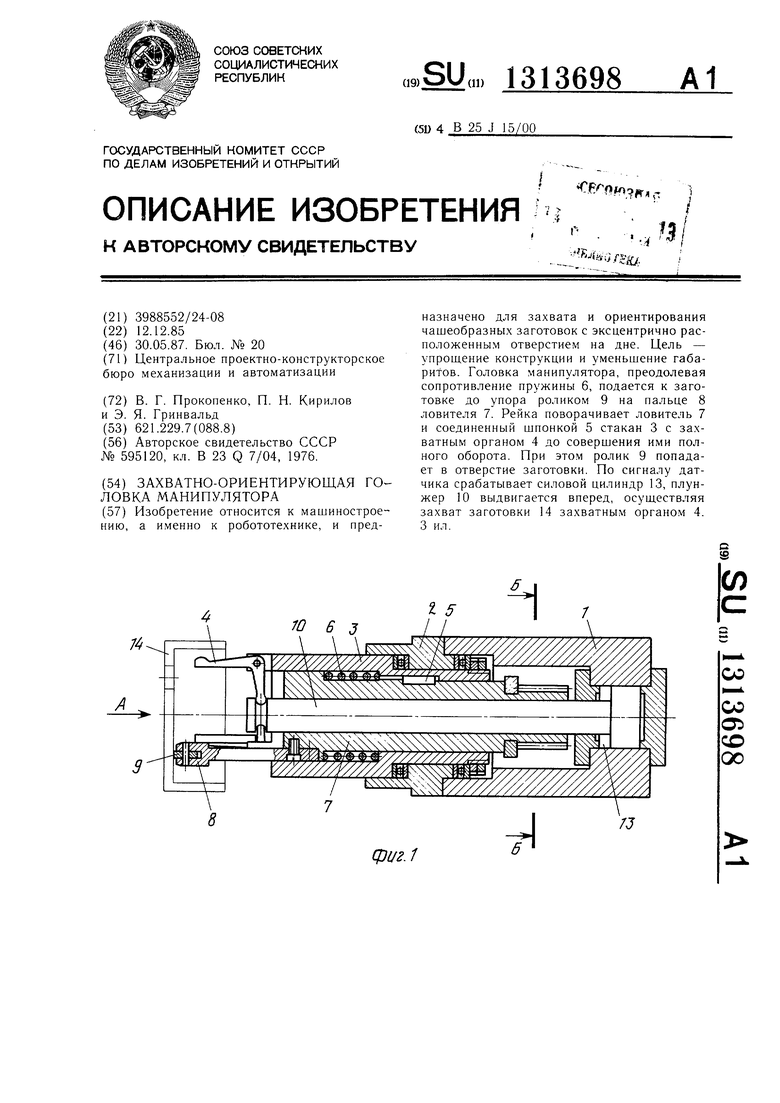
| Устройство для ориентации деталей | 1976 |
|
SU595120A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
