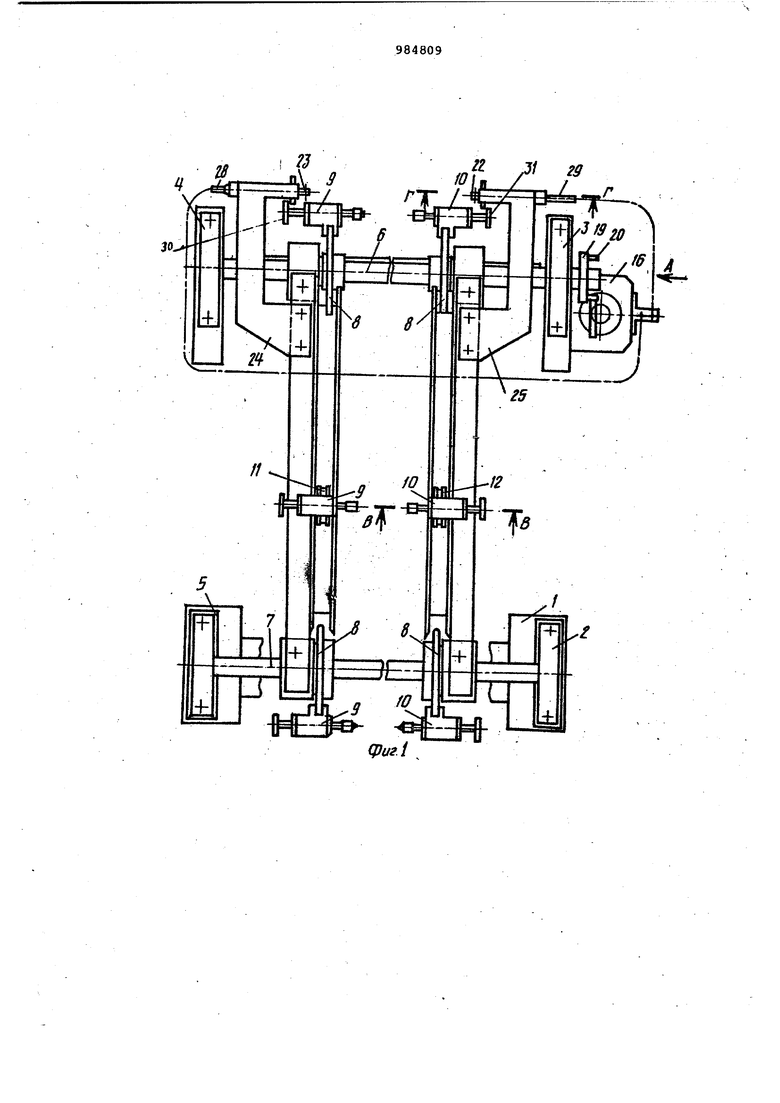
Изобретение относится к машиностроению и может быть использовано для автоматической загрузки станков и робототехнических комплексов„ известно устройство для накоплени и подачи деталей, содержащее транспортер с захватными органами, манипу ляторы загрузки и подачи детали в зо ну обработки 11. Указанное устройство позволяет ра мещать детали в гнездах тра нспортера без их крепления, что ограничивает область применения устройства. Известен и магазин для деталей, содержащий цепной транспортер с захватными органами в виде подпружиненных центров на его ветвях и привод шагового перемещения транспортера f2j Для извлечения детали манипулятором из захватных органов транспортера исполнительные элементы устройства должны иметь повышенную жесткость что ведет к увеличению металле- и энергоемкости устройства и снижает надежность его работы. Цель изобретения - повышение наде ности работы устройства. Указанная цель достигается тем, что устройство снабжено подпружиненными тягами с тросиками в гибкой обо лочке, установленными по обеим сторонам цепного транспортера с возможностью взаимодействия с подпружиненными центрами захватных органов и связанными с приводом шагового перемещения транспортера. На фиг. 1 изображено устройство, общий вид; на фиг . 2 - вид А на фигЛ на фиг, 3.- разрез Б-Б на фиго2| на фИг. 4 - разрез В-В на фиг.If на фиг. 5 - разрез Г-Г на фИГ.1о Магазин деталей содержит аму 1, опоры 2-5, приводной 6 и ведомый вал 7, звездочки 8, захватные органы в виде подпружиненных центров 9 и 10, закрепленных соосно на- ветвях 11 и 12 цепного транспортера, механизм шагового перемещения транспортера в виде поршневого привода 13, ползуна 14 с подпружиненным рычагом 15 на оси 16, упором 17 и кронштейном 18, диска 19 с пальцами 20, фиксатора 21, механизм управления зах- , ватным органом в виде подпружиненных тяг 22 и 23 в кронштейнах 24 и 25 по обе стороны транспортера в месте выгрузки детали и тросиков 26 и 27 в гибких металлических оболочках 28 к 29, кинематически связывающих цент-/ ры 9 и 10 через фланцы 30 и 31 с кронштейном-18 на ползуне. Магазин деталей работает следующим образом,, Разводя подпружиненные центры 9 и 10 захватного органа, детали вруч иую загружаются в магазин. После включения привода 13 шагового переме щения транспортера ползун 14 посредством рычага, упирающегося в палец 20, поворачивает диск 19 с приводным валом 6 и звездочками 8 на шаг, равный шагу размещения деталей на транс портере. При этом деталь в зоне зыгрузки ее манипулятором (не показан) попадает в его захват и удерживается им„ При обратном ходе привода 13 рычаг 15, разворачиваясь на оси 16, западает за очередной палец 20, а фиксатор 21 удерживает диск 19 от проворота. В этот момент кро ватейн 18, упираясь в ограничительные гайки тросиков 26 и 27, перемещает последние в гибких металлических оболочках 28 и 29, закрепленных одним концом на корпусе привода 13, а другим в кронштейнах 24 и 25 механизма управления. Вместе с ними перемещаются и тяги 22 и 23, которые, взаимодействуя с фланцами 30 и 31 подпружинен ных центров 9 и 10, раздвигают последние, освобождая деталь. После выноса детали манипулятором из зоны выгрузки цикл работы магазина повторяется. Возможна переналадка магазина на другой типоразмер деталей, как по длине, так и по месту базирования. Для регулирования расстояния между соосными центрами 9 и 10 корпуса звездочек 8 перемещают по приводном и ведомому валу б и 7, устанавливая заданные их положения для захвата детали. При смене базовых поверхностей крепления деталей в магазине возможна замена центров на захватные органы иной конфигурации, например на центра, удерживающие деталь по наружному диамеа5ру. Указанная конструкция Магазина позволяет повысить надежность работы устройства, снизить его металло- и энергоемкость, улучшить условия работы манипулятора Формула изобретения Магазин деталей, содержащий цепной транспортер с захватными органами в виде подпружиненных центров на его ветвях и привод шагового перемещения транспортера, отличающийся тем, что, с целью повышения надежности работы, он снабжен подпружиненными тягами с тросиками в Гибкой оболочке, установленными по обеим сторонам цепного транспортера с возможностью взаимодействия с подпружиненными центрами захватных органов в зоне выгрузки и связанными с приводом шагового перемещения транспортера . Источники информации, принятые во внимание при зкспертизе 1.Малов А.Н. Загрузочные устройства для металлорежущих станков. Машиностроение, 1965, с. 325, ф.199. 2.Авторское свидетельство СССР 485854, кл. В 23 Q 7/00, 1972. f /J/ la / Cpui.i 29 I
| название | год | авторы | номер документа |
|---|---|---|---|
| Роторно-конвейерная машина с вертикальной осью для листовой штамповки | 1986 |
|
SU1428562A1 |
| Загрузочное устройство | 1987 |
|
SU1433760A1 |
| Гибкий производственный модуль для листовой штамповки | 1988 |
|
SU1667994A1 |
| Автомат для сборки изделий типа цепного транспортера | 1973 |
|
SU518316A1 |
| Магазин деталей | 1983 |
|
SU1135600A1 |
| Магазин-накопитель деталей | 1986 |
|
SU1366354A1 |
| Промышленный робот | 1983 |
|
SU1155334A1 |
| Устройство для установки на печатные платы радиоэлементов, преимущественно поверхностного монтажа | 1988 |
|
SU1777256A1 |
| ПОТОЧНАЯ ЛИНИЯ ДЛЯ ИЗГОТОВЛЕНИЯ СТРОИТЕЛЬНЫХ КЕРАМИЧЕСКИХ ИЗДЕЛИЙ, ОБЖИГОВАЯ МНОГОЩЕЛЕВАЯ ШАХТНАЯ ПЕЧЬ ДЛЯ СТРОИТЕЛЬНЫХ КЕРАМИЧЕСКИХ ИЗДЕЛИЙ И СУШИЛЬНАЯ КАМЕРА ДЛЯ СТРОИТЕЛЬНЫХ КЕРАМИЧЕСКИХ ИЗДЕЛИЙ | 1993 |
|
RU2046708C1 |
| МАНИПУЛЯТОР | 2002 |
|
RU2228259C2 |


B-B
QfafM
r-r
