26 5 -16
-
19 8 Напра8/1ени.едви} е/ ия / I гfli/3o//ffcamera
П 18
4; 4 | ю ю
Фиг. 2
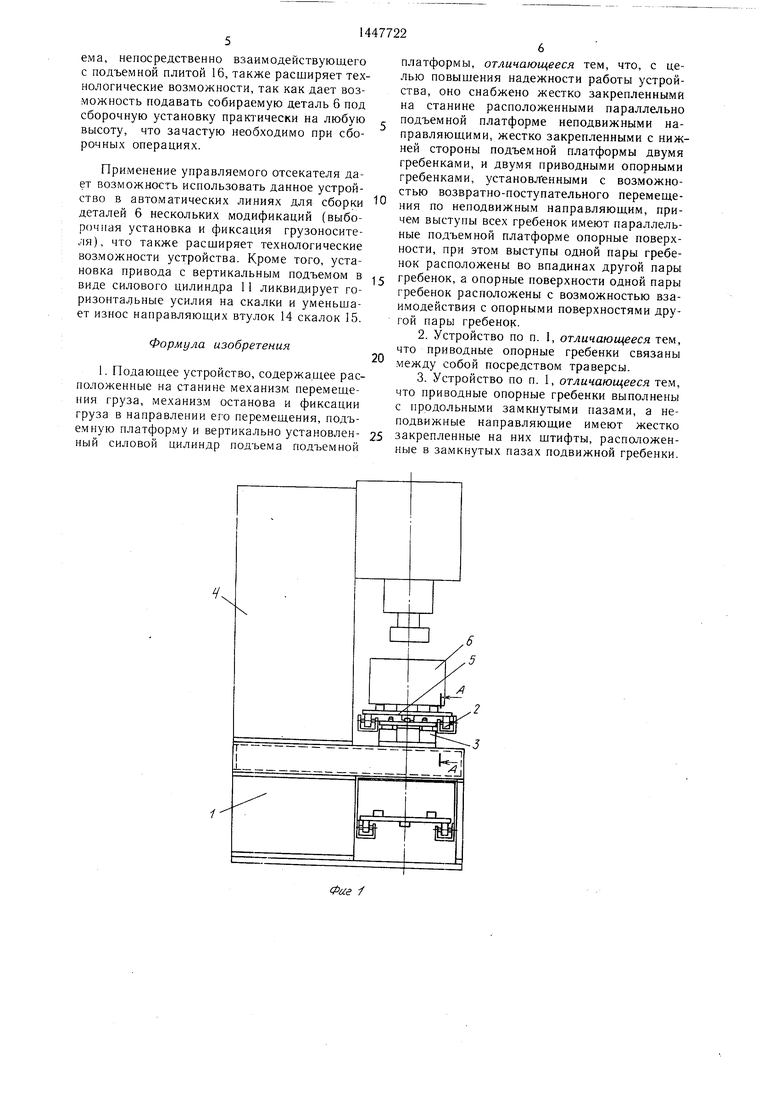
Изобретение относится к машиностроению, а именно к подающим устройствам автоматических и автоматизированных сборочных линий и станций с повышенными усилиями, например станциями с прессами, клепальные, станции завинчивания с большим усилием, клеймения и т.д.
Целью изобретения является повышение надежности работы устройства.
На фиг. 1 изображено подающее устройство, общий вид; на фиг. 2 - разрез А-А на фиг. I; на фиг. 3 - разрез Б-Б на фиг. 2; на фиг. 4 - разрез В-В на фиг. 3; на фиг. 5 - исходное положение деталей от- секателя (спутник зафиксирован).
10
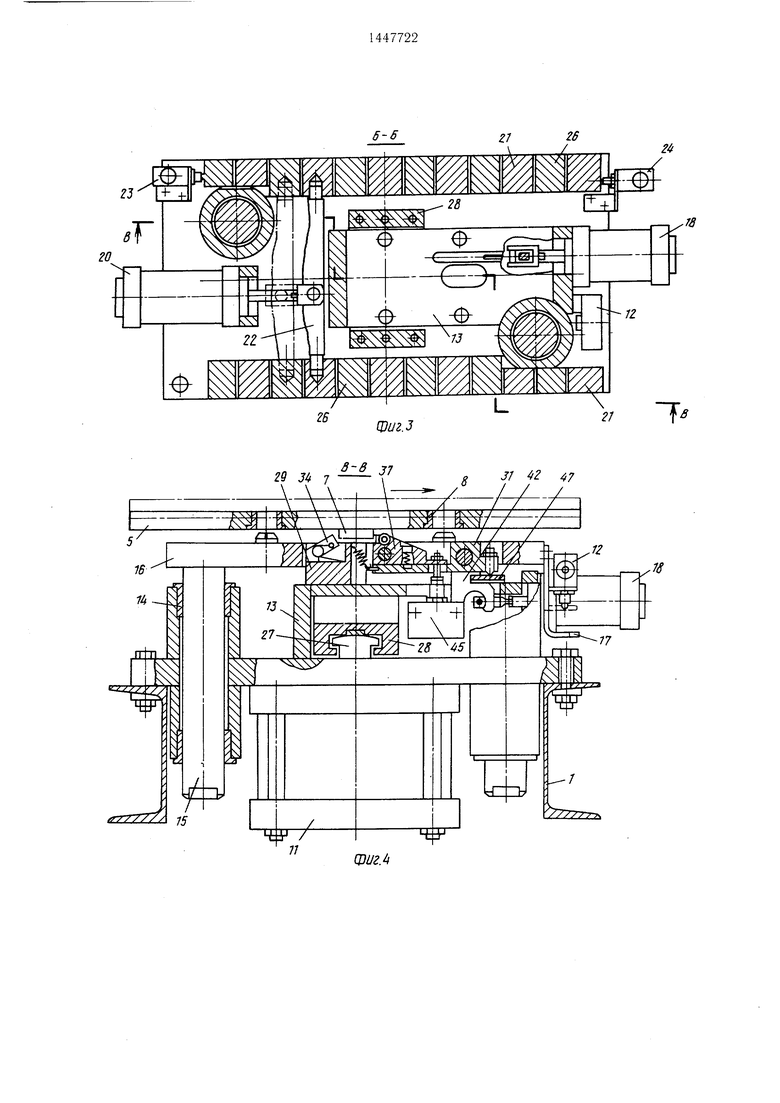
формы 16 жестко закреплены две неподвижные гребенки 26.
Выступы всех гребенок 21 и 26 имеют параллельные подъемной платформе 16 опорные поверхности, при этом выступы одной пары гребенок расположены во впадинах другой пары гребенок при опускании подъемной платфор.мы 16, а. опорные поверхности одной пары гребенок расположены с возможностью взаимодействия с опорными поверх- ностя.ми выступов другой пары гребенок после подъе.ма подъемной платформы 16. При взаимодействии опорных поверхностей выступов гребенок 21 и 26 вертикальное усилие, напри.мер, от пресса 4 при сборке детали 6
Подающее устройство содержит станину передается через направляющие 10 на основание и далее на станину 1.
Силовой цилиндр 11 воздействует на подъемную платформу 16 при помощи сферической поверхности щтока 27 и вилки 28.
На стойке 13 закреплен отсекатель 19 с
I, на которой между ветвями механизма пе- ре.мещения груза, напри.мер приводного роликового конвейера 2, установлен .механизм :3 фиксации груза. На станине 1 над ролико- вым конвейером 2 расположена сборочная
установка, например пресс 4. На конвейере 20 приводом 18. Отсекатель 19 содержит кор2 свободно установлен груз, в частности грузоноситель 5 с закрепленной на нем собираемой деталью 6. К грузоносителю 5 прикреплен упор 7 и втулки 8 с отверстиями, предназначенными для размещения в них фиксирующих пальцев 9.
Механизм 3 подъема и фиксации предназначен для подъе.ма и фиксации грузоноси-- теля и содержит жестко смонтированное на станине основание, на котором жестко закреплены неподвижные направляющие 10, а также смонтированы вертикально установленный силовой цилиндр II, переключатель 12, стойка 13 и направляющие втулки 14, в которых двигаются скалки 15 с закрепленной на них подъемной платформой 16 с фиксирующими пальцами 9 и переключающей пластиной 17, которая жестко закреплена на подъемной платформе 16. Приводом подъема подъемной платформы 16 является си25
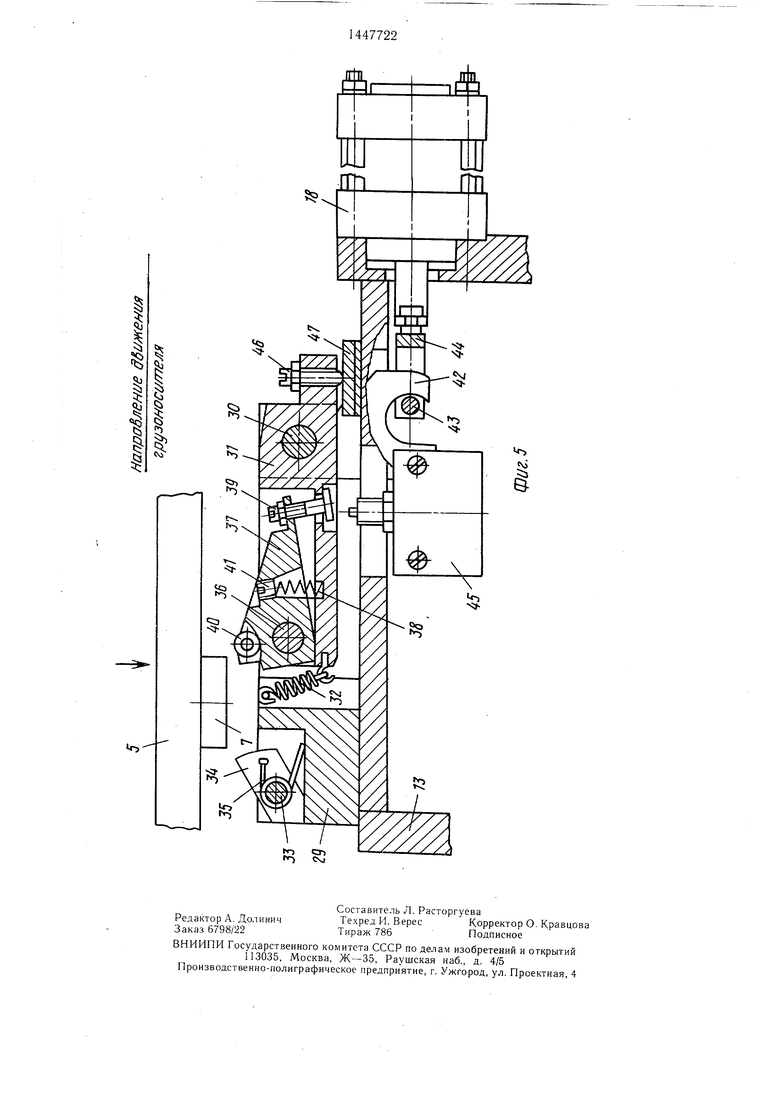
пус 29, в пазах которого на оси 30 установлен рычаг 31, подпружиненный пружиной 32 и на оси 33 защелка 34, подпружиненная пружиной 35. Защелка 34 препятствует отскоку грузоносителя 5. В вырезе рычага 31 на оси 36 расположена собачка 37, подпружиненная пружиной 38 и снабженная пере- ключающи.м упором 39 и роликом40, взаимодействующим с упором 7 грузоносителя 5 при проходе его над отсекателем после рас- 30 фиксации.
Защелка 34 и собачка 37 составляют .механизм останова и фиксации груза в направлении его пере.мещения.
Для быстрой замены пружины 38 и для предварительного ее поджатия служит пробка 41. На рычаге 31 закреплен кронштейн 42, взаимодействующий через палец 43 и вилку 44 с приводом 18. На кронштейне 42 закреплены переключатель 45, взаи.модей- ствующий с переключающим упором 39 со35
креплены привод с цилиндром 18 отсекате- ля 19, привод с цилиндром 20 двух подвижных опорных гребенок 21, связанных между
ловой цилинлр 11, а неподвижные направляющие 10 расположены параллельно подъем- 40 бачки 37. На рычаге 31 имеется регулиро- ной платформе 16. На основании также за-вочный винт 46, взаимодействующий с упругим элементом 47, закрепленным на стойке 13.
Подающее устройство работает следую- собой посредством траверсы 22, и переклю- . щим образом.
чатели 23 и 24, предназначенные для конт-Грузоноситель 5 с закрепленной на нем
роля конечного положения подвижных гребенок 21, установленных с воз.можностью . возвратно-поступательного перемещения по неподвижным направляющим 10.
Для направления и ограничения величи- 50 ны перемещения подвижных гребенок 21 служат щтифты 25, жестко закрепленные на неподвижных направляющих 10 и расположенные в продольных замкнутых пазах подвижных гребенок 21.
Подъемная платформа 16 имеет вырез с 5 целью размещения в нем верхней части корпуса отсекателя 19. С нижней стороны платсобираемой деталью 6, двигаясь по конвейеру 2, приходит под сборочную установку 4, нажимает упоро.м 7 на собачку 37 и поворачивает ее вокруг оси 36 до соприкосновения с верхней плоскостью паза в рычаге 31, поворачивая рычаг 31 вместе с собачкой 37 вокруг оси 30. При этом регулировочный винт 46 упирается в упругий эле.мент 47 и вся энергия удара грузоносителя на отсекатель гасится в нем.
Одновременно переключающий упор 39, расположенный на собачке 37, нажи.мает на переключатель 45, который дает сигнал на
формы 16 жестко закреплены две неподвижные гребенки 26.
Выступы всех гребенок 21 и 26 имеют параллельные подъемной платформе 16 опорные поверхности, при этом выступы одной пары гребенок расположены во впадинах другой пары гребенок при опускании подъемной платфор.мы 16, а. опорные поверхности одной пары гребенок расположены с возможностью взаимодействия с опорными поверх- ностя.ми выступов другой пары гребенок после подъе.ма подъемной платформы 16. При взаимодействии опорных поверхностей выступов гребенок 21 и 26 вертикальное усилие, напри.мер, от пресса 4 при сборке детали 6
передается через направляющие 10 на основание и далее на станину 1.
5
пус 29, в пазах которого на оси 30 установлен рычаг 31, подпружиненный пружиной 32 и на оси 33 защелка 34, подпружиненная пружиной 35. Защелка 34 препятствует отскоку грузоносителя 5. В вырезе рычага 31 на оси 36 расположена собачка 37, подпружиненная пружиной 38 и снабженная пере- ключающи.м упором 39 и роликом40, взаимодействующим с упором 7 грузоносителя 5 при проходе его над отсекателем после рас- 0 фиксации.
Защелка 34 и собачка 37 составляют .механизм останова и фиксации груза в направлении его пере.мещения.
Для быстрой замены пружины 38 и для предварительного ее поджатия служит пробка 41. На рычаге 31 закреплен кронштейн 42, взаимодействующий через палец 43 и вилку 44 с приводом 18. На кронштейне 42 закреплены переключатель 45, взаи.модей- ствующий с переключающим упором 39 со5
0 бачки 37. На рычаге 31 имеется регулиро- вочный винт 46, взаимодействующий с упсобираемой деталью 6, двигаясь по конвейеру 2, приходит под сборочную установку 4, нажимает упоро.м 7 на собачку 37 и поворачивает ее вокруг оси 36 до соприкосновения с верхней плоскостью паза в рычаге 31, поворачивая рычаг 31 вместе с собачкой 37 вокруг оси 30. При этом регулировочный винт 46 упирается в упругий эле.мент 47 и вся энергия удара грузоносителя на отсекатель гасится в нем.
Одновременно переключающий упор 39, расположенный на собачке 37, нажи.мает на переключатель 45, который дает сигнал на
подъем платформы 16 и включает силовой цилиндр 11, который своим штоком 27 через закрепленную на подъемной платформе i6 вилку 28 перемещает платформу 16 с грузо- носителем 5 вверх, отрывая последний от роликов конвейера 2. При этом фиксирующие пальцы 9 входят в отверстия втулок 8, точно ориентируя грузоноситель 5 относительно сборочной установки 4.
Поднимаясь вверх, упор 7 выходит из зацепления с собачкой 37 и она под действием пружины 38 занимает исходное положение. При крайнем верхнем положении подъемной платформы 16 с грузоносителем 5 переключающая пластина 17, закреплен10
упор 7 грузоносителя проскальзывает по ролику 40 собачки, освобождая ее, и она вместе с рычагом 31 под действием пружины 32, поворачиваясь вокруг оси 30, занимает исходное положение (фиг. 5), завершая цикл работы устройства.
В случае технологической необходимости, например деталь другой модификации и не подлежит операции на данной сборочной установке или произошел брак в сборке на предшествующей операции, т.е. когда грузоноситель должен свободно пройти под сборочной установкой 4 (без фиксации), тогда считыватель, закрепленный на грузоносите- ле (не показан), или какой-либо характерная на платформе нажимает на переключа- 15 пый выступ на собираемой детали 6, нажи- тель 12 и включается привод с цилиндром 20,мает на переключатель, установленный на
шток которого втягивается и перемещает конвейере 2 перед установкой 4 (не показан) посредством траверсы 22 подвижные гребенки 21 в крайнее левое положение в пределах длины паза для штифтов 25. При этом высту- - закрепленную на нем вилку 44, которая попы неподвижных гребенок 26 совмещаются с средством пальца 43 и кронштейна 42 пово- выступами подвижных гребенок 21, как бы подпирая платформу. В крайнем левом повключает цилиндр 18 привода отсекателя, шток цилиндра втягивается, перемещая
ложении гребенка 21 нажимает на переключатель 23 и включается сборочная установка
рачивает рычаг 31 с собачкой 37 вокруг оси 30, преодолевая сопротивление пружины 32. Собачка 37 опускается вниз и грузоноситель 5 свободно проходит под установкой 4. Прой4, и так как платформа 16 подперта под- 5 ду ;становку 4, грузоноситель нажимает на
вижной гребенкой 21, то вся нагрузка от пресса через направляющие 10 воспринимается основанием, установленным на станине 1. По окончании сборочной операции с
выключатель, установленный на конвейере 2 (не показан), включается цилиндр 18 на возврат щтока в исходное положение (щток выдвигается) и рычаг 31 вместе с собачкой
установки 4 подается сигнал на цилиндр 20, jo - действием пружины 32 возвращаются
который перемещает посредством траверсы 22 подвижные гребенки 21 в крайнее правое положение (в пределах длины паза для щти- фтов 25), выводя при этом упоры подвиж- ных гребенок 21 из-под упоров неподвижных
в исходное положение (фиг. 5), препятствуя проходу следующе1-о грузоносителя 5 с собираемой деталью 6.
В случае длительного пропуска грузоно- сителей под установкой 4 не будет сигнала
гребенок 26. При этом каждый упор непод- 35 выключение цилиндра 18, щток его будет
вижной (подвижной) гребенки оказывается напротив соответствующего паза в подвижной (неподвижной) гребенке, т.е. подпор платформы убран.
В крайнем гфавом положении подвижная гребенка нажимает на переключатель 24 и подается сигнал на опускание платформы 16. При опускании платформы с грузоносителем выступы неподвижных гребенок входят в пазы подвижных гребенок (положение по40
оставаться в крайнем правом положении, удерживая рычаг 31 с собачкой 37 внизу, и грузоносители будут свободно проходить под установкой 4, а в случае постоянного пропуска грузоносителя 5, например при ремонте установки 4, регулировочным винтом 46 (ввинчивая) можно опустить и зафиксировать рычаг 31 с собачкой 37 в крайнем нижнем положении.
В случае использования устройства для казано на фиг. 2), а грузоноситель 5 своим 45 установок с малым вертикальным усилием, упором (нижней плоскостью) нажимает свер- папри.мер для резьбозавинчивающих стан- ху на собачку 37 и, преодолевая сопротивле-ков, достаточно убрать подвижные 21 и пение пружины 32, прижимает ее вместе с ры-подвижные 26 гребепки вместе с приводом 20
чагом 31 вниз, поворачивая его вокруг оси и траверсой 22.
30.Такое выполнение устройства расщиряет
Грузоноситель 5 встает на ролики кон- 50 технологические возможности, так как выполнено более компактно путем расположевейера 2, а платформа 16 продолжает движение вниз и выводит закрепленные на ней пальцы 9 из отверстий втулок 8, освобождая грузоноситель от фиксации. Освободивщий- ся грузоноситель подхватывают приводные ролики конвейера 2 и перемещают его на следующую сборочную позицию согласно технологической карты сборки, при этом
55
ния привода гребенок внутри конструкции (устройства), а компактное устройство легче встраивать в линию в стесненных условиях из-за болылой плотности механизмов в линии.
Кроме того, увеличение высоты подъема платформы за счет установки привода подъ0
упор 7 грузоносителя проскальзывает по ролику 40 собачки, освобождая ее, и она вместе с рычагом 31 под действием пружины 32, поворачиваясь вокруг оси 30, занимает исходное положение (фиг. 5), завершая цикл работы устройства.
В случае технологической необходимости, например деталь другой модификации и не подлежит операции на данной сборочной установке или произошел брак в сборке на предшествующей операции, т.е. когда грузоноситель должен свободно пройти под сборочной установкой 4 (без фиксации), тогда считыватель, закрепленный на грузоносите- ле (не показан), или какой-либо характерконвейере 2 перед установкой 4 (не показан) закрепленную на нем вилку 44, которая посредством пальца 43 и кронштейна 42 пово-
включает цилиндр 18 привода отсекателя, шток цилиндра втягивается, перемещая
конвейере 2 перед установкой 4 (не показан) закрепленную на нем вилку 44, которая посредством пальца 43 и кронштейна 42 пово-
рачивает рычаг 31 с собачкой 37 вокруг оси 30, преодолевая сопротивление пружины 32. Собачка 37 опускается вниз и грузоноситель 5 свободно проходит под установкой 4. Пройду ;становку 4, грузоноситель нажимает на
выключатель, установленный на конвейере 2 (не показан), включается цилиндр 18 на возврат щтока в исходное положение (щток выдвигается) и рычаг 31 вместе с собачкой
- действием пружины 32 возвращаются
в исходное положение (фиг. 5), препятствуя проходу следующе1-о грузоносителя 5 с собираемой деталью 6.
В случае длительного пропуска грузоно- сителей под установкой 4 не будет сигнала
0
оставаться в крайнем правом положении, удерживая рычаг 31 с собачкой 37 внизу, и грузоносители будут свободно проходить под установкой 4, а в случае постоянного пропуска грузоносителя 5, например при ремонте установки 4, регулировочным винтом 46 (ввинчивая) можно опустить и зафиксировать рычаг 31 с собачкой 37 в крайнем нижнем положении.
55
ния привода гребенок внутри конструкции (устройства), а компактное устройство легче встраивать в линию в стесненных условиях из-за болылой плотности механизмов в линии.
Кроме того, увеличение высоты подъема платформы за счет установки привода подъем а, непосредственно взаимодействующего с подъемной плитой 16, также расширяет технологические возможности, так как дает возможность подавать собираемую деталь 6 под сборочную установку практически на любую высоту, что зачастую необходимо при сборочных операциях.
Применение управляемого отсекателя дает возможность использовать данное устройство в автоматических линиях для сборки деталей б нескольких модификаций (выборочная установка и фиксация грузоносите- ля), что также расширяет технологические возможности устройства. Кроме того, установка привода с вертикальным подъемом в виде силового цилиндра 11 ликвидирует горизонтальные усилия на скалки и уменьшает износ направляющих втулок 14 скалок 15.
Формула изобретения
I. Подающее устройство, содержащее расположенные на станине механизм перемещения груза, механизм останова и фиксации груза в направлении его перемещения, подъемную платформу и вертикально установленный силовой цилиндр подъема подъемной
5
0
5
платформы, отличающееся тем, что, с целью повышения надежности работы устройства, оно снабжено жестко закрепленными на станине расположенными параллельно подъемной платформе неподвижными направляющими, жестко закрепленными с нижней стороны подъемной платформы двумя гребенками, и двумя приводными опорными гребенками, установл енными с возможностью возвратно-поступательного перемещения по неподвижным направляющим, причем выступы всех гребенок имеют параллельные подъемной платформе опорные поверхности, при этом выступы одной пары гребенок расположены во впадинах другой пары гребенок, а опорные поверхности одной пары гребенок расположены с возможностью взаимодействия с опорными поверхностями другой пары гребенок.
2.Устройство по п. 1, отличающееся тем, что приводные опорные гребенки связаны между собой посредством траверсы.
3.Устройство по п. 1, отличающееся тем, что приводные опорные гребенки выполнены с продольными замкнутыми пазами, а неподвижные направляющие имеют жестко закрепленные на них штифты, расположенные в замкнутых пазах подвижной гребенки.

| название | год | авторы | номер документа |
|---|---|---|---|
| Подающее устройство | 1985 |
|
SU1313773A1 |
| Подающее устройство | 1983 |
|
SU1139611A1 |
| Устройство для фиксации грузоно-СиТЕля | 1979 |
|
SU852732A1 |
| Тележечный конвейер | 1980 |
|
SU981136A1 |
| Транспортная система несинхронной сборочной линии спутникового типа | 1981 |
|
SU956242A1 |
| Подающее устройство | 1986 |
|
SU1437179A1 |
| Устройство для фиксации грузоносителей | 1984 |
|
SU1270073A1 |
| Подающее устройство | 1981 |
|
SU1039828A1 |
| Многопозиционный автомат для сборки корпусных деталей с деталями типа подшипников и крышек | 1974 |
|
SU545443A1 |
| Сборочная линия | 1985 |
|
SU1255352A1 |
Изобретение относится к машиностроению. Цель - повышение надежности пазов устройства. На станине 1 расттоложены механизм перемещения груза, механизм останова и фиксации груза в направлении его перемещения, жестко закреплены неподвижные направляющие (Н) 10. По Н 10 возвратно-поступательно перемещаются две приводные опорные гребенки (Г) 21. Выступы Г 21 расположены во впадинах другой пары Г 26, жестко закрепленной с нижней стороны подъемной платформы (ПП) 16, установленной параллельно Н 10. При этом ПП 16 имеет вертикально установленный на станине 1 силовой цилиндр 11 ее подъема. Выступы .всех Г имеют параллельные ПП 16 опорные поверхности. Причем последние одной пары Г взаимодействуют с опорными поверхностями другой пары Г. При этом Г 21 и 26 связаны между собой траверсой, а Г 21 выполнены с продольными замкнутыми пазами, в которых расположены щтифты 25, жестко закрепленные на Г 26. При включении силового цилиндра 11 он поднимает ПП 16 и посредством траверсы перемещаются Г 21 в крайнее левое положение в пределах длины пазов для штифтов 25 и подпирают ПП 16. По окончании сборки Г 21 траверсой перемещаются в крайнее правое положение, т.е. подпор ПП 16 убран, и последняя опускается. 2 з.п. ф-лы, 5 ил. (О (Л
2Б
37
5-6
Z lf
/
Ц)иг.з
27
В
Фиг.
| Подающее устройство | 1985 |
|
SU1313773A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
