В номера позиции, в которой устройство, с датчиков путе мации объекта управления. И с регистра 1 в прямых кодах 5 на блок 2 вычитания, которы дит вычисление разности
,
Изобретение относится к автоматическому управлению и может быть использовано при организации систем управления приводными механизмами технологического оборудования.
Цель изобретения - расширение функциональных возможностей устройства за счет возможности формирования количества шагов перемещения.
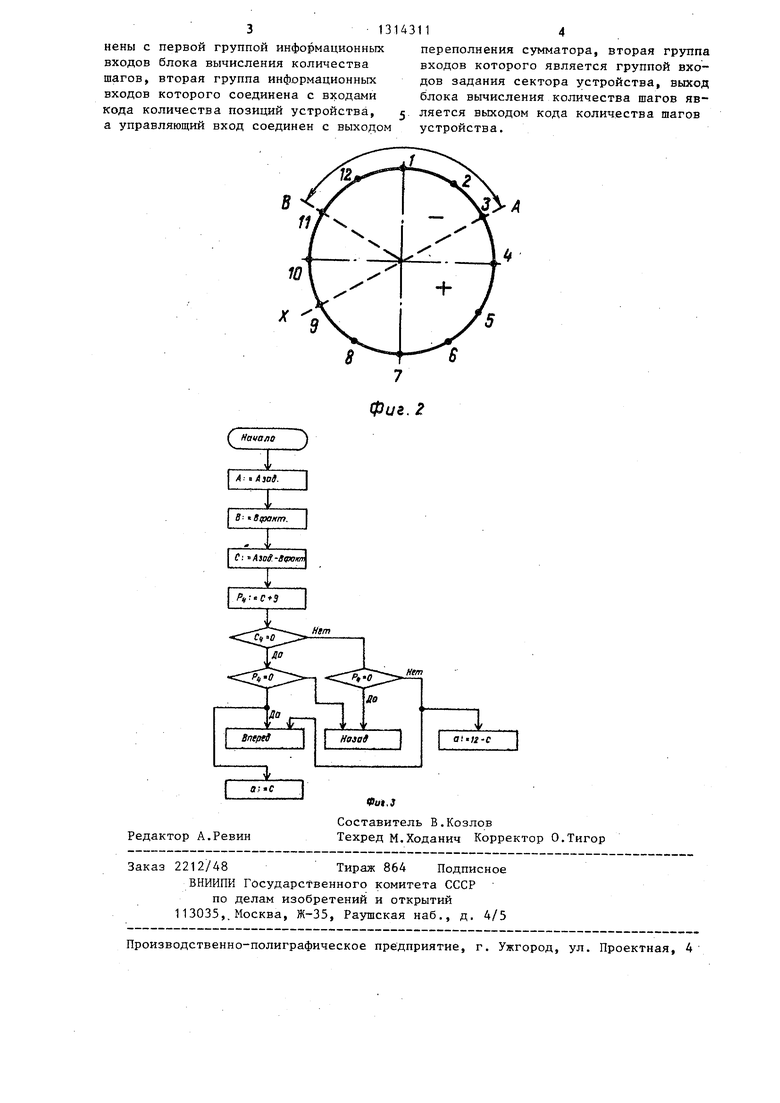
На фиг.1 изображена блок-схема 10 Цредпагаемого устройства; на фиг. 2- схема расположений позиций в замкнутом контуре технологического устрой- с:тва; на фиг.З - алгоритм определения
направления движения и количества ша- t5 константой X в сумматоре 4: гов для технологического устройства с замкнутым контуром из 12-и позиций для случая, когда необходимо существ- вить переход из 3-й позиции в 11-ю.
Устройство содержит регистр 1, i. 20 блок 2 вычитания, блок 3 определения направления движения, схему 4 сравнения, выполненную на сумматоре, и блок 5 вычисления количества шагов.
Устройство работает следующим об- 25 разом.
где С - абсолютное значение 1 при С П
- признак О при С О Значение модуля С суммир
, при 2 С+Х 1 при
Константа X определя.ет п устройства (сектор) в завис заданного и фа ;тического и
У-7 A-Z - -у 1,
где п - разность чисел в дво
N 2,4,6, - количество в технологическом устройств четному числу, причем
В регистр 1 заносятся операнды А номера позиции, в которую необходимо перейти из устройства ввода задания, реализованного в виде наборного поля или ЭВМ с аналогичными функциями, и
2П J,T N
30
Направление движения объекта управления определяется блоком 3 определения направления движения в соответствии с- логическими выражениями:
CnAPriVCnAP - движение назад (против часовой стрелки, -) ; Сг PnV С пЛРп - движение вперед (по часовой стрелке + ) .
Блок 3 реализован на базе злемен- щее блок вычитания, схему сравнения, тов И-НЕ.блок определения направления движеКоличество шагов перемещения определяется в блоке 5 вычисления количества шагов, реализованном на базе
ния, причем выходы разности блока вычитания соединены с первой группой входов схемы сравнения, выход которой
арифметико-логического устройства по 0 соединен с первым входом 5лока опревыражен.ию:
с, при Р,0
Г
N-C, при Р„
При приближении к заданной позиции 5 направления движения устройства, значение числа Q по модулю убывает. отличаю щееся тем, что, признак о,о является сигналом останов- расширения функциональных
возможностей за счет возможности форки объекта управления. Например, при перемещении из 3-й позиции в при и , так как .
направление движения , т.е. необходимо сделать четыре шага против часовой стрелки.
Формула изобретения
Устройство для управления положе- нием приводного механизма,, содержамирования количества шагов, схема 50 сравнения выполнена на сумматоре и в него дополнительно введены блок вычисления количества шагов и регистр, содержащий два подрегистра, информационные входы которых являются входа- 55 ми заданного и текущего номеров позиций устройства, а выходы разрядов соединены соответственно с первой и второй группами входов блока вычитания, выходы разности которого соедиВ номера позиции, в которой находится устройство, с датчиков путевой информации объекта управления. Информация с регистра 1 в прямых кодах подается на блок 2 вычитания, который производит вычисление разности
значение разности;
признак заема. С суммируется с
константой X в сумматоре 4:
, при 2 С+Х 1 при
Константа X определя.ет положение устройства (сектор) в зависимости от заданного и фа ;тического и равна
У-7 A-Z - -у 1,
где п - разность чисел в двоичном коде j
N 2,4,6, - количество позиций в технологическом устройстве, равное четному числу, причем
2П J,T N
ния, причем выходы разности блока вычитания соединены с первой группой входов схемы сравнения, выход которой
деления направления движения, выход знака блока вычитания соединен с вторым входом блока определения направления, выходы которого являются выхомирования количества шагов, схема 50 сравнения выполнена на сумматоре и в него дополнительно введены блок вычисления количества шагов и регистр, содержащий два подрегистра, информационные входы которых являются входа- 55 ми заданного и текущего номеров позиций устройства, а выходы разрядов соединены соответственно с первой и второй группами входов блока вычитания, выходы разности которого соеди3 13143
йены с первой группой информационных входов блока вычисления количества шагов, вторая группа информационных входов которого соединена с входами кода количества позиций устройства, а управляющий вход соединен с выходом
5
переполнения сумматора, вторая группа входов которого является группой входов задания сектора устройства, выход блока вычисления количества шагов яв- ляется выходом кода количества шагов устройства.
Л Начапо
/4: KiOi.
I
fl: tSlfJOHm. I
J.
С: A)
I I
Hgm
Редактор А.Ревин
Фа.}
Составитель В.Козлов
Техред М.Ходанич Корректор О.Тигор
Hem
Заказ 2212/48Тираж 864 Подписное
ВНИИПК Государственного комитета СССР
по делам изобретений и открытий 113035,. Москва, Ж-35, Раушская наб., д, 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4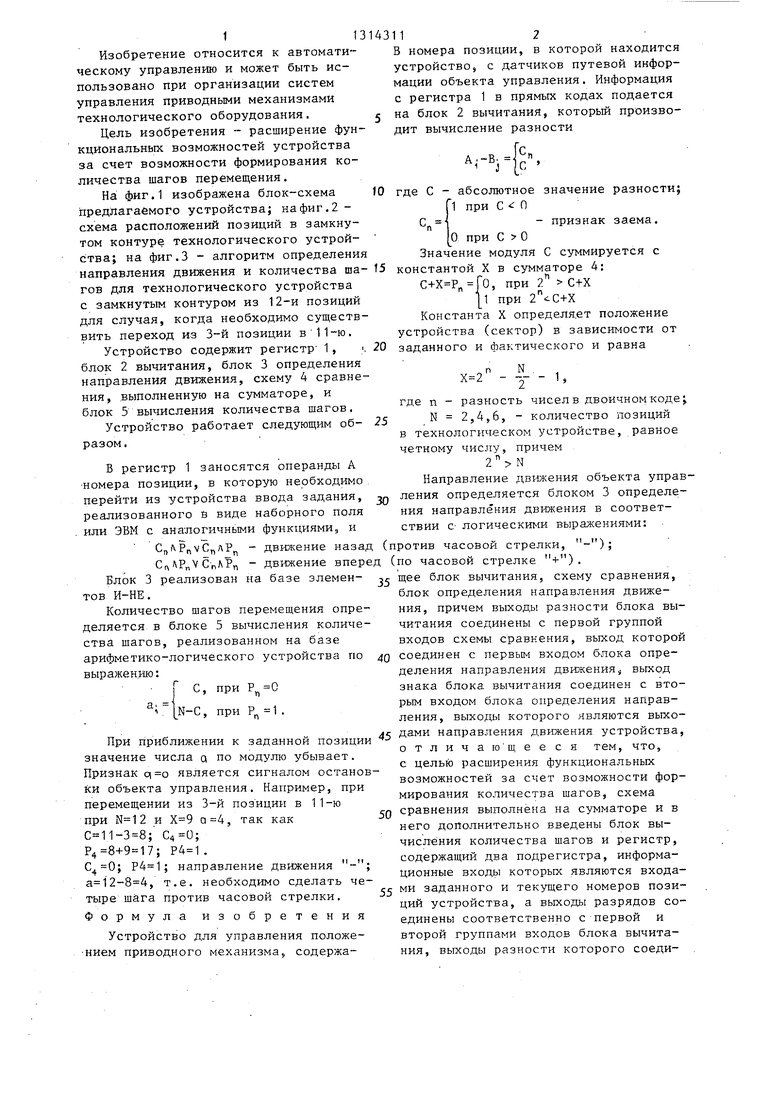
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления положением приводного механизма | 1987 |
|
SU1441355A2 |
| Арифметическое устройство в модулярной системе счисления | 1987 |
|
SU1432517A1 |
| Вычислительное устройство | 1986 |
|
SU1322270A1 |
| Устройство для сравнения чисел в системе остаточных классов | 1983 |
|
SU1145338A1 |
| Устройство для обнаружения ошибок в кодовой последовательности | 1989 |
|
SU1780191A1 |
| Устройство для обработки информации, представленной в системе остаточных классов | 1990 |
|
SU1743002A1 |
| Устройство для сравнения чисел в системе остаточных классов | 1982 |
|
SU1037244A1 |
| Устройство для вычисления тригонометрических функций | 1986 |
|
SU1332313A1 |
| Устройство для сравнения чисел в системе остаточных классов | 1984 |
|
SU1224803A1 |
| Устройство для поворота вектора (его варианты) | 1982 |
|
SU1078431A1 |
Изобретение относится к средствам автоматики для оптимизации поиска нужной позиции и направления движения к ней в замкнутых контурах технологических устройств и может быть использовано в системах управления технологическим оборудованием. Цель изобретения - расширение функциональных возможностей устройства за счет формирования количества шагов перемещения. Устройство содержит регистр 1, блок вычитания 2, блок 3 определения направления движения, сумматор 4, блок 5 вычисления количества шагов. Операнды заданного и фактического номера позиции регистра поступают на блок вычитания. Вычисленная разность поступает на сумматор и блок определения направления движения, формирующий знак направления перемещения в зависимости от выходного сигнала сумматора, определяемого заданной константой. Одновременно блок вычисления количества шагов определяет количество шагов перемещения объекта управления . 3 ил. б (Л (риг. /
| Авторское свидетельство СССР № 1195337, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для выбора наименьшего угла поворота вращающегося узла станка | 1976 |
|
SU643837A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
