«
| название | год | авторы | номер документа |
|---|---|---|---|
| Регулятор расстояния от инструмента до токопроводящей поверхности | 1978 |
|
SU858250A1 |
| Автоматический регулятор расстояния от инструмента до поверхности изделия | 1979 |
|
SU853894A1 |
| Регулятор положения инструмента относительно токопроводящей поверхности | 1985 |
|
SU1315190A1 |
| Автоматический регулятор расстояния от инструмента до поверхности изделия | 1987 |
|
SU1423315A1 |
| Способ определения координат кромок металлического листа и устройство для его осуществления | 1990 |
|
SU1832070A1 |
| Автоматический регулятор расстояния от инструмента до поверхности изделия | 1987 |
|
SU1479223A1 |
| Способ определения координат кромок металлического листа | 1986 |
|
SU1761404A1 |
| Автоматический регулятор расстояния от резака до поверхности изделия | 1961 |
|
SU149665A1 |
| Машина для термической резки листов | 1979 |
|
SU872086A1 |
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ПЛАЗМЕННОЙ ГОЛОВКИ | 1991 |
|
RU2083337C1 |
РЕГУЛЯТОР РАССТОЯНИЯ ОТ ИНСТРУМЕНТА ДО ТОКОПРОВОДЯЩЕЙ ПОВЕРХНОСТИ по авт.св. № 858250, отличающийся тем, что, с целью :Hbjiiiit.:Ji:-H повьшения надежности работы регулятора путем исключения возможности появления аварийной ситуации при завершении реза листа, в устройство введен измеритель уровня сигнала со световой и звуковой сигнализацией, подключенный г через нормально открытый контакт порогового реле к выходу усилителя и к одной из клемм нормально закрытого контакта порогового реле.
СО
СП)
о
00 00
Изобретение относится к системам автоматического контроля и регулирования, в частности к авторегуляторам расстояния от резака до металлической поверхности при газовой резке
По основному авт.св. № 858250 известен регулятор расстояния от инструмента до токопроводящей поверхности. Он содерзкит .высокоча стотный датчик, вьтолненньй в виде металлического витка подключенный к узлам измерения, сравнения и генератору высокой частоты,.усилитель, подключенный к исполнительному механизму, и пороговое реле, обмотка которого включена параллельно усилителю, а нормально закрытый контакт порогового реле одной своей клеммой подключен к исполнительному механизму, а другой - к точке подключения обмотки указанного реле к усилителю.
Недостатком этого регулятора является отсутствие информации о расстоянии от инструмента (резаков) до края разрезаемого листа, что необходимо для осуществления подготовительньгк мероприятий для остановки горизонтального перемещения резаков, отключения работы резаков и т.д., поскольку дальнейшее их перемещение может вызвать аварийную ситуацию: удар движущихся частей об ограядения за пределами листа, резка элементов постели, на которой находится разрезаемый лист и т.п.
Для повьшения надежности работы регулятора путем исключения возможности йоявления аварийной ситуации при завершении реза листа в предла-, гаемый регулятор, содержащий высокочастотный датчик, выполненный в виде металлического витка, подключенный к узлам измерения, сравнения и генератору высокой частоты, усилитель, подключенный к исполнительному механизму и пороговое реле, обмотка которого включена параллельно усилителю, а нормально закрытый контакт порогового реле одной своей клеммой подключен к исполнительному.механизму, а другой - к точке подключения обмотки реле к усилителю, введен измеритель уровня сигнала со световой и звуковой сигнализацией, подключенный через нормально открытый контакт порогового реле к выходу усилителя и к одной из клемм нормально закрытого контакта порогового реле.
Это позволяет при подходе датчика и соответственно резаков к краю листа, когда происходит пассивное горизонтальное перемещение, без их авторегулирования по высоте ( двигатель вертикального перемещения отключен) использовать активную работу датчика в этом режиме, сигнал с которого и соответственно с усилителя обратно
пропорционален расстоянию от датчика и соответственно резаков до края листа. Таким образом, вредное влияние краевого эффекта на датчик вертикального перемещения используется в
области пассивного горизонтального перемещения резаков для измерения расстояния от них до края листа. При :большом удалении резаков от края листа и движении в его сторону уровень сигнала с датчика и соответственно с усилителя будет сначала мал, а затем будет уве.пичиваться, а отсчетное устройство измерителя уровня сигнала, имея обратную шкалу, будет
показывать изменяющееся от большего к меньшему значение расстояния до края листа (большему уровню сигнала соответствует меньшее расстояние до края листа). Максимальное значение
уровня сигнала будет при выходе всего витка датчика за край листа, что по отсчетному устройству будет соответствовать нулевому значению расстояния от резаков до края листа.
Следует отметить, что если сопла резаков проходят внутри витка датчика, базовая ошибка равна нулю. Если виток датчика расположен впереди резаков, наблюдается постоянная базовая
ошибка, учитываемая, вводимая заранее, при вьшолнении реза как вдали, так и вблизи края листа. Таким образом, при определении расстояния от резаков до края листа во втором случае к показаниям отсчетного устройства добавляют величину этой базовой ошибки.
Поскольку определять расстояние от резаков до края листа необходимо только при подходе резаков к нему, измеритель уровня сигнала подключен к выходу усилителя через нормально открытые контакты порогового реле. При этом лишь только тогда, когда отключается двигатель вертикального перемещения резаков, к усилителю подключается измеритель уровня сигнала, что уменьшает его шунтирующее
действие при активной работе авторегулятора расстояния от резаков до разрезаемого листа, сохраняя при этом имеющуюся точность автоматического поддержания расстояния от резаков до разрезаемого металлического листа, а также увеличивает срок службы измерителя уровня сигнала.
Для того, чтобы оператор мог получать информацию о приближении резаков к краю листа на заранее заданное расстояние, не наблюдая постоянно за счетным устройством, измеритель уровня сигнала снабжен звуковой и световой сигнализацией.
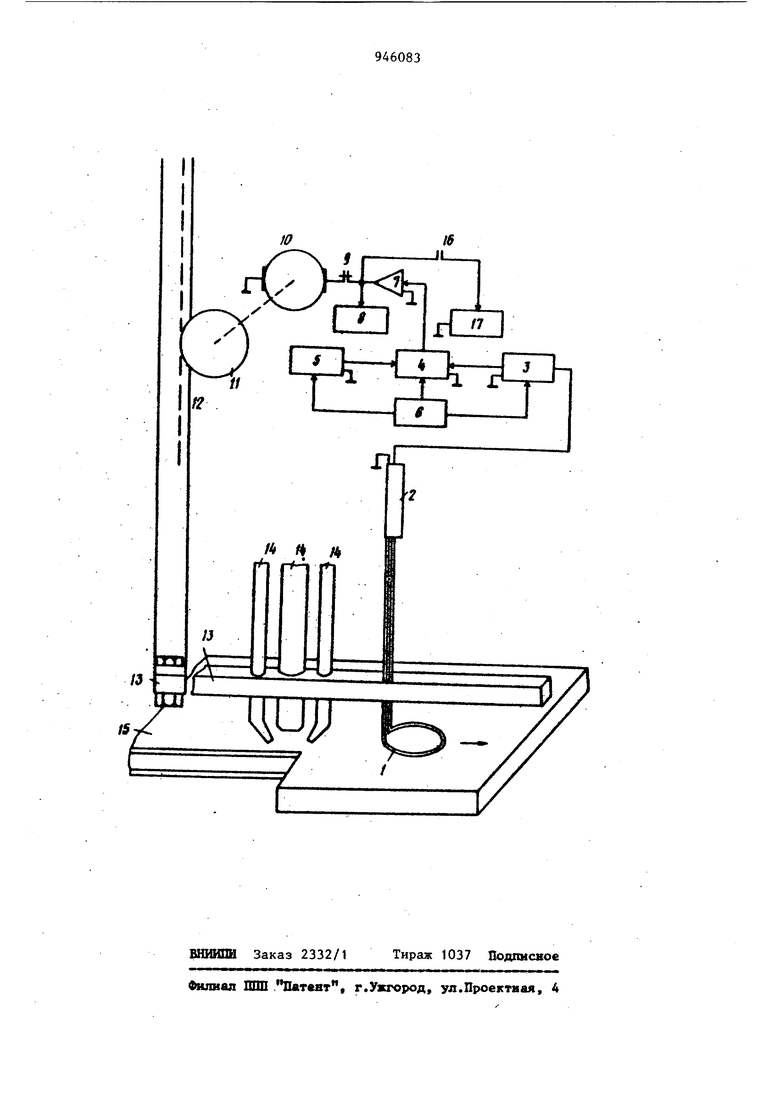
Конструкция регулятора и взаимное расположение его отдельных элементов изображены на чертеже.
Высокочастотный датчик регулятора образован металлическим витком 1 и коаксиальным кабелем 2., Коаксиальный кабель 2 датчика подключен к электрической схеме регулятора, при этом центральная жила коаксиального кабеля подключена к входу узла изнерения 3. Выход узла измерения 3 соединен с входом узла сравнения 4, второй вход которого соединен с узлом задания 5. Генератор высокой частоты 6 соединен с узлами измерения 3, сравнения 4 и задания 5. Выход узла сравнения соединен с входом усилителя 7. усилителя 7 соединен с пороговым реле 8 и одной из клемм его нормально замкнутого контакта 9. Вторая клемма нормально замкнутого контакта 9 соединена с обмоткой двигателя 10. Вал двигателя 10 связан с входным валом редуктора 11, выходной червяк которого перемещает рейку 12, жестко связанную с основанием 13, на котором закреплены газовые резаки 14 (два крайних повернуты на 90 ) и металлический виток 1 датчика, расположенные над токопроводящей поверхностью 15. Одна клемма нормально разомкнутого контакта 16 порогового реле 8 соединена с выходом усилителя 7. Вторая клемма нормально разомкнутого контакта 16 соединена с входом измерителя уровня сигнала 17.
Работа регулятора осуществляется следующим образом.
При включении питания на схему автоматического регулирования в зависимости от сигнала узла задания 5
резаки 14 устанавливаются на определенном расстоянии от токопроводяще поверхности 15. При этом параметры датчика:, включая металлический BJIток 1, обеспечивают такой выходной сигнал узла измерения 3, которьй при подаче его на вход узла сравнени 4 определяет нулевой сигнал на его выходе, т.е. на входе и выходе усилителя 7 сигнал равен нулю и двигатель 10 вертикального перемещения не вращается, а резаки 14 и металлический виток 1 не имеют вертикального перемещения, а происходит лишь их горизонтальное перемещение вдоль намеченного реза, показанного стрелкой (механизм горизонтального перемещения не показан). При изменении расстояния от металлического витка 1 до токопроводящей поверхности 15 вследствие, например, деформации разрезаемого листа изменяется индуктивность металлического витка 1 и, следовательно, выходной сигнал узла измерения 3 и узла сравнения 4, а на выходе усилителя 7 появляется сигнал, недостаточный для срабатьгеания порогового реле 8, но вызывающий вращение двигателя 10, редуктора 11, перемещение рейки 12, основания 13 и вертикального перемещения резаков 14 и металлического витка 1 до получения нулевого сигнала с выхода узла сравнения 4, При этом расстояние между резаками 14 и токопроводящей поверхностью 15 будет снова равн заданному, и резаки 14 будут выполнять качественный рез с образованием требуемых кромок.
При подходе металлического витка 1 и резаков 14 к краю разрезаемого листа происходит резкое изменение выходного сигнала усилителя 7, во много раз большее изменения этого сигнала при авторегулировании положения резаков 14 по высоте. При этом срабатывает пороговое реле 8, его нормально замкнутые контакты 9 размыкаются, отключая двигатель вертикального перемещения резаков 14 и витка 1 датчика. Дальнейший рез осуществляется при зафиксированном положении резаков 14 н витка 1 по высоте. В момент срабатывания порогового реле 8 замыкаются его нормально разомкнутые контакты 16 и к выходу усилителя 7 подключается измеритель уровня сигнала 17, имеющий отсчетное 5 устройство (на чертеже не показано) проградуированное в единицах длины, Причем отсчетное устройство имеет обратную шкалу: меньшим значением сигнала, подаваемым на измеритель уровня сигнала, соответствуют больш значения расстояний до края листа. При большем приближении витка 1 к краю листа сигнал с выхода усилителя будет большим, а по отсчетному устройству будет отмечаться меньшее расстояние, оставшееся до края лист В случае, когда виток 1 датчика движется вйереди резаков, в градуировке отсчетного устройства учитывается постоянная базовая ошибка. Поскольку измеритель уровня сигнала 17 подключается к усилителю 7 тольк при подходе резаков 14 к краю листа и отключении двигателя 10 вертикаль кого перемещения, при выполнении реза вдали от края листа (основной рабочий резким) влияние входного сопротивления измерителя уровня сиг нала 17 на точность автоматического поддержания расстояния от реваков 14 до токопроводящей поверхности полностью исключается. Кроме того, поскольку измеритель уровня сигнала 17 будет включаться лишь на короткие промежутки времени, его срок службы будет увеличен. Для того чтобы оператор не следил постоянно за показаниями измери теля уровня сигнала 17, т.е. за расстоянием до края листа, он устанавливает подвижный контакт (на чертеже не показан), закрепленный вблиз отсчетного устройства измерителя уровня сигнала 17, напротив того значения расстояния до края листа, по достижении которого хочет получить световой и звуковой сигнал 3 для начала подготовки к операции окончания реза и отключения горизонтального перемещения резаков 14. При этом как только величина расстояния от резаков 14 до края листа достигнет установленного значения, с помощью подвижного контакта замкнутся цепь питания звуковой и световой сигнализации. Кроме обеспечения возможности получения информации о до стижении дискретного значения расстояния от резаков 14 до края листа в виде световой и звуковой сигнализации это обеспечивает повышение производительности труда оператора, поскольку исключает необходимость постоянного наблкщения оператором за приближением к краю листа. Устанавливаемые с помощью подвижного контакта значения расстояния до края листа могут быть различными в зависимости от скорости горизонтального перемещения резаков и других условий резания. Наличие измерителя уровня сигнала, подключенного к выходу усилителя через нормально открытые контакты порогового реле и снабженного подвижным контактом, подключающим устройство сигнализации к источнику питания, позволяет простыми техничес кими средствами без оказания влияния на схему автоматического регулирования расстояния от резаков до токопроводящей поверхности осуществить измерение расстояния от резаков до края листа, что исключит возможность появления аварийных ситуаций при завершении реза листа, повысит производительность труда оператора, улучшит удобство эксплуатации используемого оборудования.
