t1
Изобретение относится к машиностроению, конкретно к автоматическим манипуляторам или промьшленным роботам для механизации технологических процессов, содержащих подъемно-транспортные операции, подачу деталей в зону сварки и т.п.
Цель изобретения - повышение надежности захвата листовых деталей при сварке за счет создания протяженной опорной поверхности.
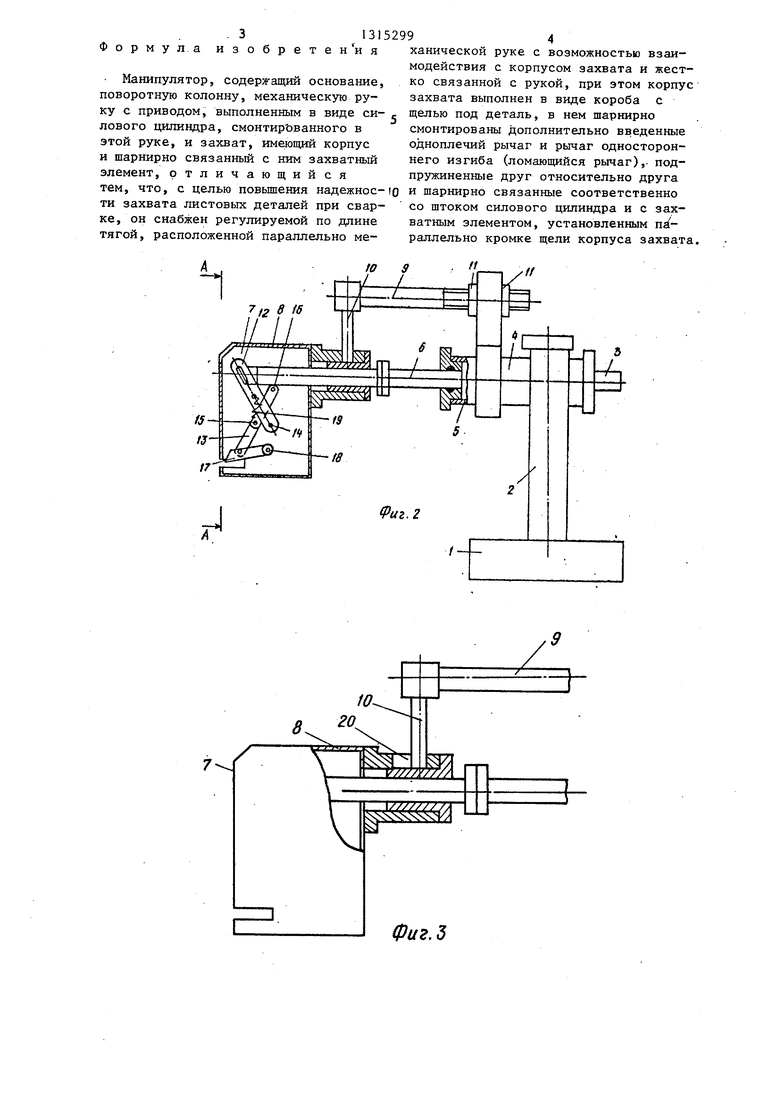
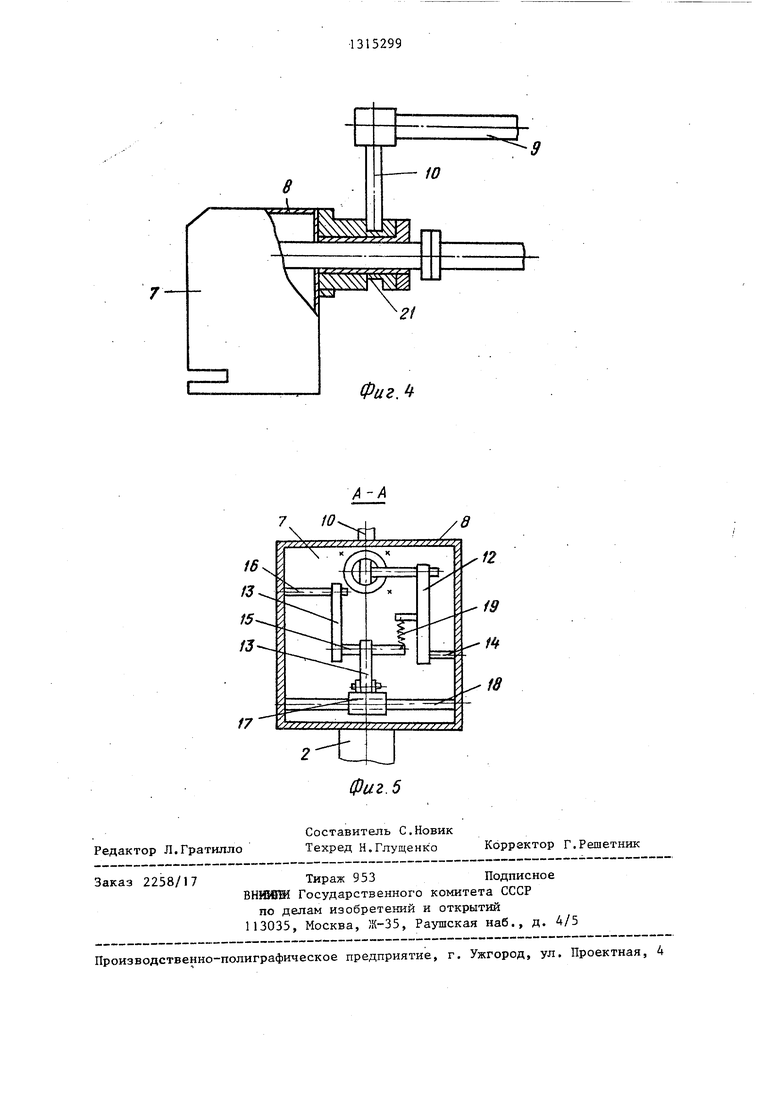
На фиг.1 показан манипулятор, вид спереди, с механизмом захвата в раскрытом положении; на фиг.2 - то же, с механизмом захвата в закрытом по- ложении; на фиг.З - манипулятор, с продольным пазом на корпусе механизма захвата; на фиг.4 - то же, с кольцевой канавкой на корпусе механизма захвата; на фиг.З - сечение А-А на фиг.2.
На фиг.1 и 2 показана одна рука, вторая устанавливается аналогично. Манипулятор состоит из основания 1 с поворотной колонной 2, на которой установлена механическая рука 3. Механическая рука 3 включает в себя корпус 4, в котором установлен пнев- моцилиндр 5. На штоке 6 цилиндра 5 установлен механизм 7 захв ата.
Корпус 8 механизма захвата соединен с корпусом 4 механической руки 3 посредством механической тяги 9 с упором 10. Длина механической тяги 9 регулируется гайками 11. Механизм 7 захвата включает приводной 12 и ломающийся 13 рычаги. Приводной рычаг 12 шарнирно соединен со штоком 6 и установлен на шарнире 14. Ломающийся рычаг имеет шарнир 15, установленный на шарнире 16 и соединен- ньй с прижимной губкой 17, которая установлена на шарнире 18. Приводной 12 и ломающийся 13 рычаги соединены пружиной 19.
Корпус 8 механизма 7 захвата может быть выполнен с продольным пазом 20, в котором шарнирно устанавливается упор 10 механической тяги 9.
Корпус 8 механизма 7 захвата может быть выполнен с кольцевой канавкой 21, в которой шарнирно устанавливается упор 10 механической тяги 9. На концах продольного паза 20 могут быть выполнены кольцевые канавки 21 .
Манипулятор работает следующим образом.
992
По команде с пульта управления поворотная колонна 2, поворачиваясь, устанавливает механическую руку 3 на позиции захвата детали, которая в
этот момент оказывается под прижим- ной губкой 17. Пневмоцилиндр 5 механической -руки 3 ,выдвигает шток 6 вперед, при этом механическая тяга 9 удерживает корпус 8 механизма 7 захвата в неподвижном положении, а шток 6 перемещает приводной рычаг 12 вперед, который посредством пружины 19 выпрямляет ломающийся рычаг 13 вокруг шарнира 15. Прижимная губка 17
проворачивается вокруг шарнира 18 и зажимает деталь в механизме 7 захвата. Затем, поворачиваясь, поворотная колонна 2 с механической рукой 3 устанавливает деталь на новой позиции. При раскрытии механизма 7 захвата шток 6 цилиндра 5 механической руки З движется назад, приводит в действие рычаги 12 и 13 и прижимную губку 17. Рычаг 13 ломается вокруг
шарнира 15 и механизм 7 захвата раскрывается. Затем цикл работы повторяется. Рука 3 манипулятора, вращаясь вместе с поворотной колонной 2, заводит механизм захвата на деталь сбоку от нее, и после зажима переносит деталь на необходимую поЗИ1ЩЮ.
Часто, в зависимости от конфигурации детали, необходимо заводить механизм захвата на деталь спереди.
В этом варианте на корпусе 8 механизма 7 захвата упор 10 устанавливается в продольном пазе 20 в крайнем положении, дальнем от поворотной колонны 2. При движении штока 6 корпус 8 перемещается вперед на деталь вместе со штоком 6. Когда противоположный конец паза 20 упрется в упор 10, движение корпуса 8 прекратится, а
дальнейшее движение штока 6 приведет к зажатию детали. При обратном движении штока 6 зажимные элементы механизма 7 захвата раскроются, а затем корпус 8 приводится в первоначальное
положение.
Часто, после переноса детали-на новую позицию, необходимо повернуть ее на определенный угол.
В зтом варианте на корпусе 8 механизма 7 захвата упор 10 устанавливается в кольцевой канавке 21. Поворот механизма 7 захвата осуществляется поворотом силового циливдра 5 механической руки 3.
. 3
131529
Формула изобретен и я
Манипулятор, содержащий основание, поворотную колонну, механическую руку с приводом, выполненным в виде си- , лового цилиндра, смонтированного в этой руке, и захват, имеющий корпус и шарнирно связанный с ним захватный элемент, отличающийся тем, что, с целью повьшения надежное-iо ти захвата листовых деталей при сварке, он снабжен регулируемой по длине тягой, расположенной параллельно ме1315299
ханической руке с возможностью взаимодействия с корпусом захвата и жестко связанной с рукой, при этом корпус захвата выполнен в виде короба с щелью под деталь, в нем шарнирно смонтированы дополнительно введенные одноплечий рычаг и рычаг одностороннего изгиба (ломающийся рычаг),- подпружиненные друг относительно друга и щарнирно связанные соответственно со штоком силового цилиндра и с захватным элементом, установленным раллельно кромке щели корпуса захвата
/
//
п 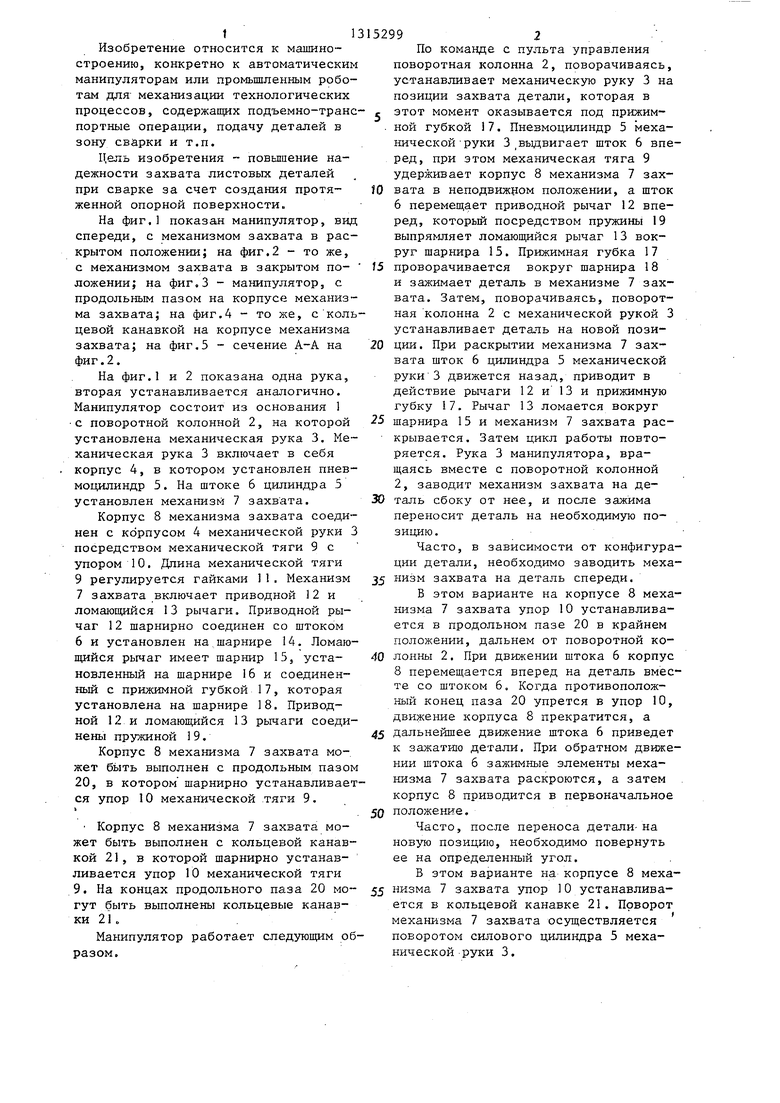
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР | 1991 |
|
RU2032527C1 |
| Захватное устройство | 1985 |
|
SU1283098A1 |
| СОЕДИНИТЕЛЬНАЯ МУФТА ТРУБОПРОВОДОВ С ПРИВОДОМ | 2024 |
|
RU2832372C1 |
| Автомат для сборки пряжек | 1973 |
|
SU484967A1 |
| Устройство для фиксации и прижима свариваемых деталей | 1977 |
|
SU707741A1 |
| Механическая рука для транспортирования банок щелочных аккумуляторов | 1977 |
|
SU683898A1 |
| Приспособление к манипулятору для захвата и удаления полых деталей | 1977 |
|
SU682392A2 |
| Манипулятор к гильотинным ножницам | 1978 |
|
SU770687A1 |
| Установка для изготовления биметаллических деталей | 1982 |
|
SU1069941A1 |
| Устройство для выгрузки изделий из печи | 1980 |
|
SU916946A1 |
Изобретение относится к станкостроению. Цель изобретения - повышение на,цежности захвата листовых деталей при сварке за счет создания протяженной опорной поверхности. Когда деталь подается в корпус 8 механизма захвата, включается пневмоцилиндр 5 и через систему рычагов находящихся внутри корпуса 8, губка 17 прижимает листовую деталь к протяженной опорной поверхности, образованной щелью, выполненной в корпусе. 5 ил. (Л с Фиу.1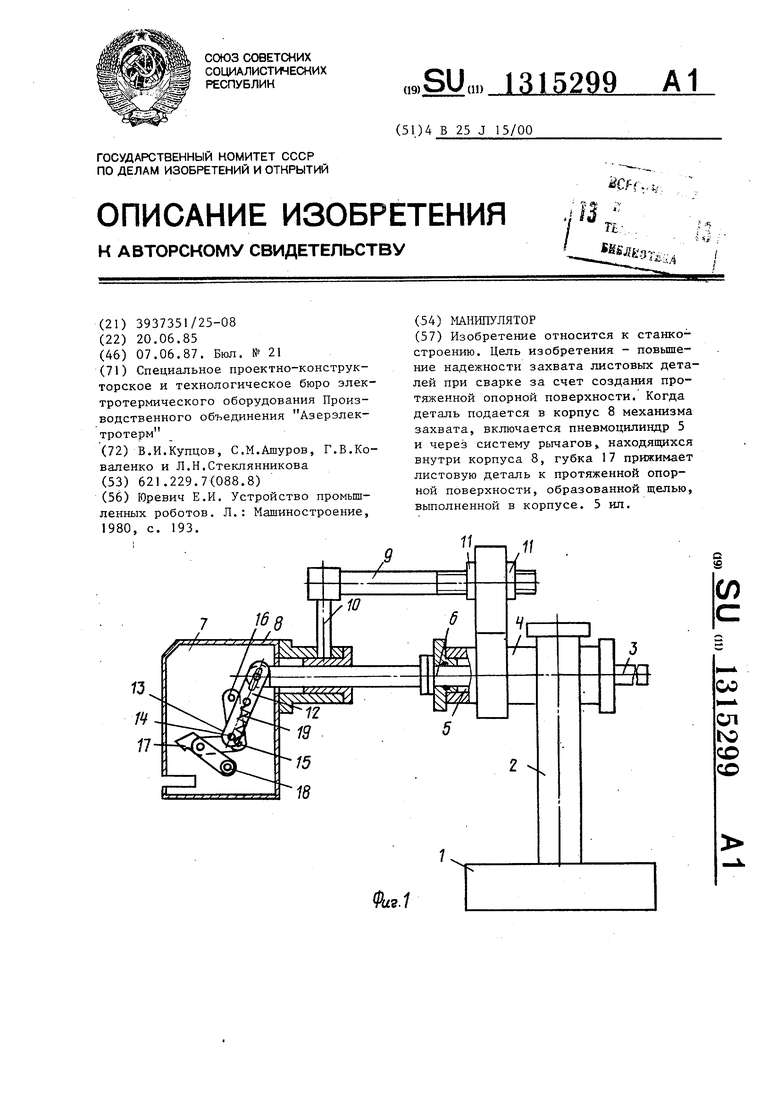
Фиг,3
ФигЛ
ч .л-, ТП
а
Редактор Л.Гратилло
Составитель С.Новик Техред Н.Глущенко
Заказ 2258/17
Тираж 953Подписное
Государственного комитета СССР по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Корректор Г.Решетник
| Юревич Е.И | |||
| Устройство промышленных роботов | |||
| Л.: Машиностроение, 1980, с | |||
| Приспособление для градации давления в воздухопроводе воздушных тормозов | 1921 |
|
SU193A1 |
