Известная конструкция приспособления для захвата предусматривает в соответствии с технологическим процессом последовательное перемещение руки манипулятора на разные позиции для укладки листовой заготовки на матрицу, для захвата кольцевого отхода и, наконец, для захвата самого стакана, что невозможно осуществить манипулятором, перемещение руки которого происходит до жесткого упора, так как для перемещения на следующую позицию необходимо переместить автоматически упор, что не всегда возможно в существующих конструкциях манипуляторов.
Другим недостатком известного устройства является невозможность осуществления одновременного захвата обрезанного кольца и отщтампованного стакана, что сказывается на нроизводительности работы манипулятора.
Для этого в предлагаемом приспособлении к манипулятору для захвата и удаления полых деталей захватная головка снабжена скобой со смонтированными на ней захватами, в частности магнитными, электромагнитными или вакуумными.
С целью повыщения производительности работы манипулятора путем обеспечения возможности одновременного захвата стакана и отрезанного от него кольцевого отхода скоба жестко закреплена на зажимной поворотной губке.
Для исключения необходимости дополнительного горизонтального перемещения руки манипулятора скоба закреплена на корпусе захватной головки.
Кроме того, скоба может быть выполнена в виде двух пластин, щарнирно установленных на оси, закрепленной в корпусе, и подпружиненных одна относительно другой.
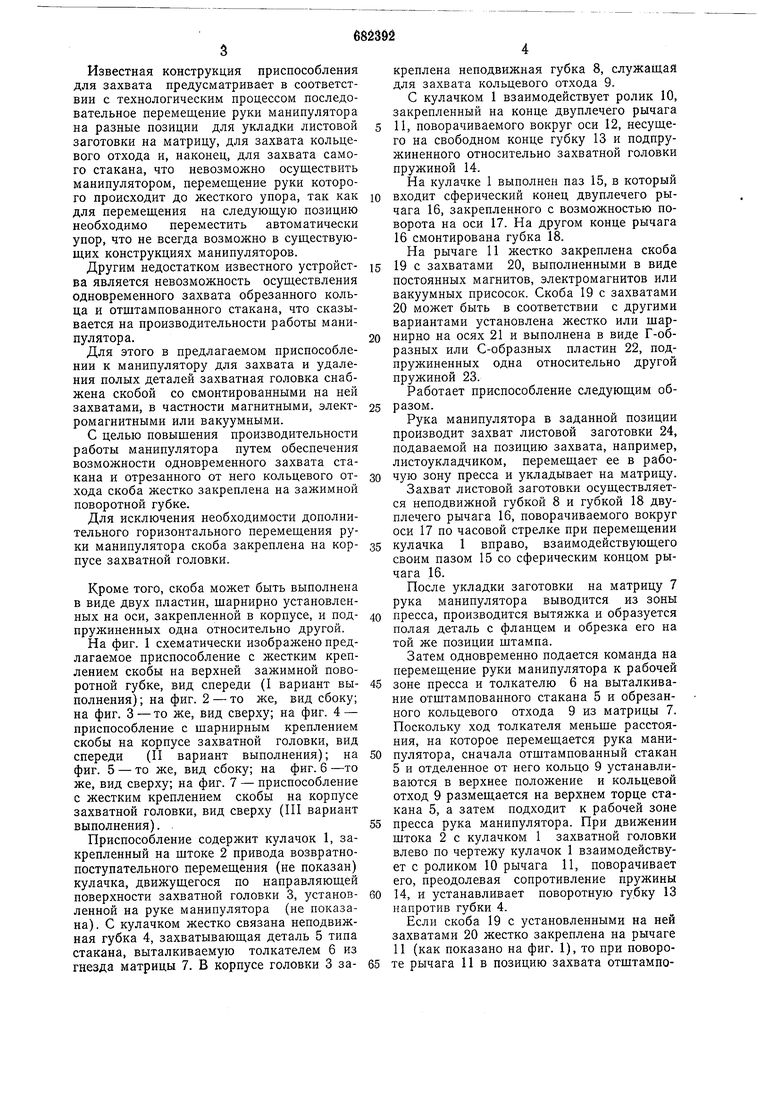
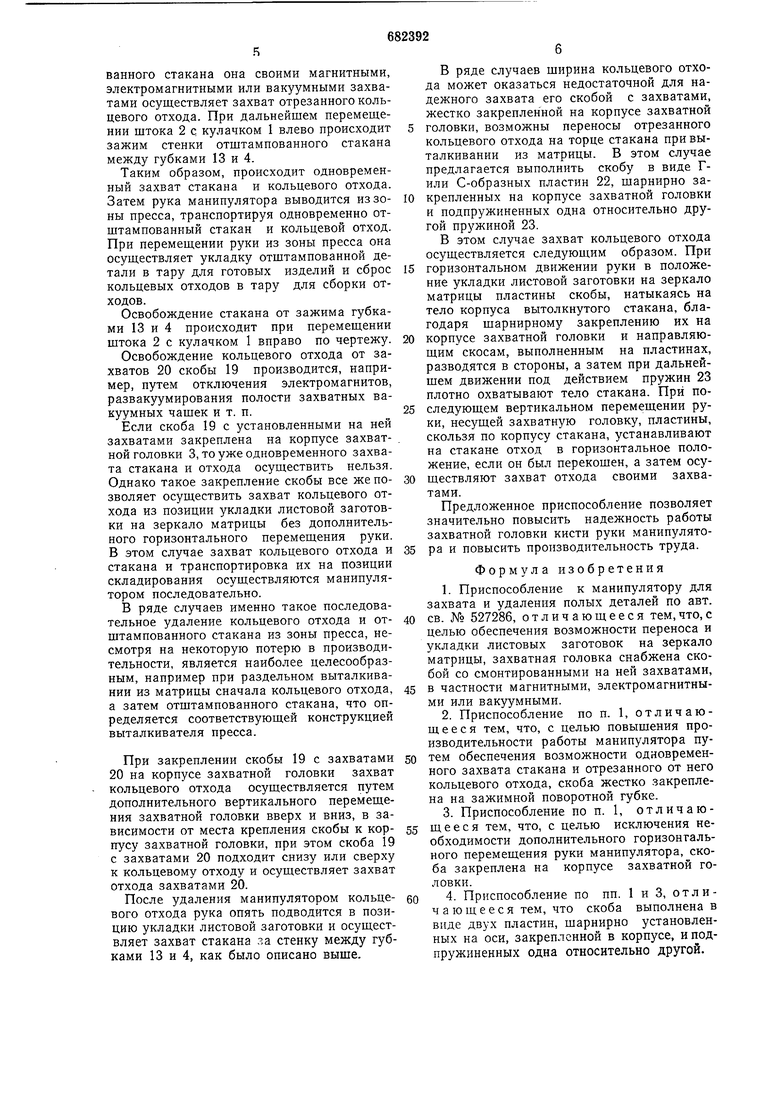
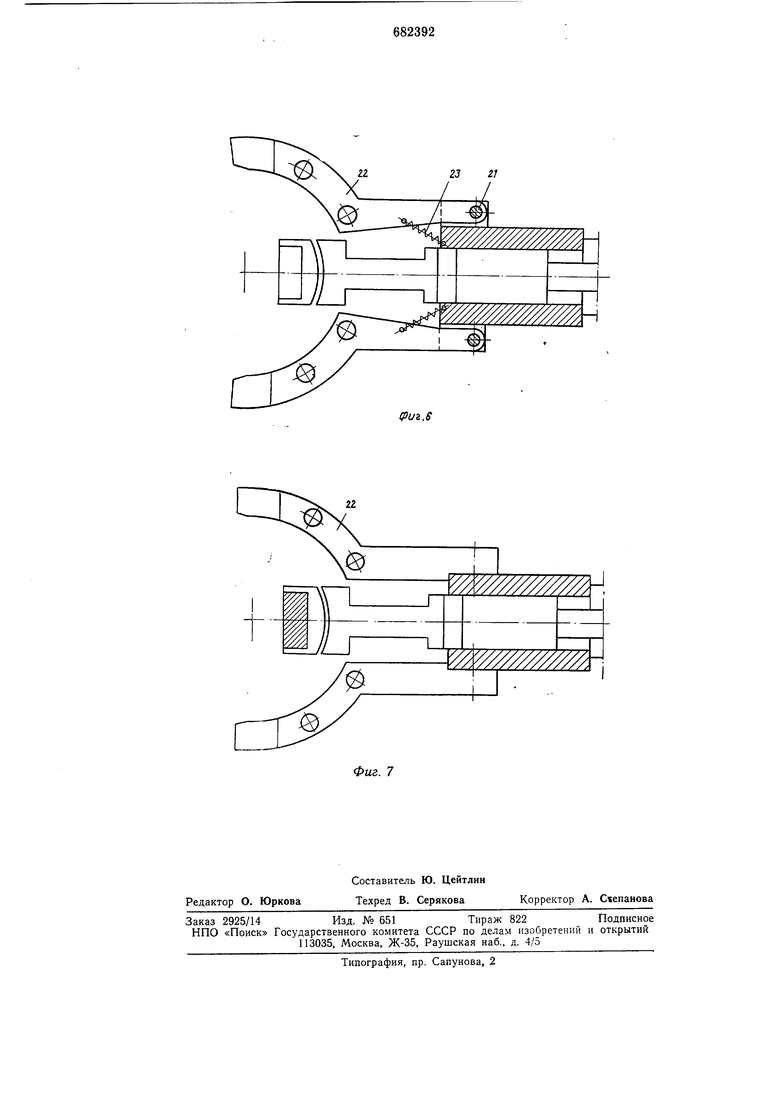
На фиг. 1 схематически изображено предлагаемое приспособление с жестким креплением скобы на верхней зажимной поворотной губке, вид спереди (I вариант выполнения); на фиг. 2 - то же, вид сбоку; на фиг. 3-то же, вид сверху; на фиг. 4 - приспособление с шарнирным креплением скобы на корпусе захватной головки, вид спереди (II вариант выполнения); на фиг. 5 - то же, вид сбоку; на фиг. 6 -то же, вид сверху; на фиг. 7 - приспособление с жестким креплением скобы на корпусе захватной головки, вид сверху (1П вариант выполнения).
Приспособление содержит кулачок 1, закрепленный на щтоке 2 привода возвратнопоступательного перемещения (не показан) кулачка, движущегося по направляющей поверхности захватной головки 3, установленной на руке манипулятора (не показана). С кулачком жестко связана неподвижная губка 4, захватывающая деталь 5 типа стакана, выталкиваемую толкателем 6 из гнезда матрицы 7. В корпусе головки 3 закреплена неподвижная губка 8, служащая для захвата кольцевого отхода 9.
С кулачком 1 взаимодействует ролик 10, закрепленный на конце двуплечего рычага И, поворачиваемого вокруг оси 12, несущего на свободном конце губку 13 и подпружиненного относительно захватной головки пружиной 14.
На кулачке 1 выполнен паз 15, в который входит сферический конец двуплечего рычага 16, закрепленного с возможностью поворота на оси 17. На другом конце рычага 16 смонтирована губка 18.
На рычаге 11 жестко закреплена скоба
19с захватами 20, выполненными в виде постоянных магнитов, электромагнитов или вакуумных присосок. Скоба 19 с захватами
20может быть в соответствии с другими вариантами установлена жестко или щарнирно на осях 21 и выполнена в виде Г-образных или С-образных пластин 22, подпружиненных одна относительно другой пружиной 23.
Работает приспособление следующим образом.
Рука манипулятора в заданной позиции производит захват листовой заготовки 24, подаваемой на позицию захвата, например, листоукладчиком, перемещает ее в рабочую зону пресса и укладывает на матрицу.
Захват листовой заготовки осуществляется неподвижной губкой 8 и губкой 18 двуплечего рычага 16, поворачиваемого вокруг оси 17 по часовой стрелке при перемещении кулачка 1 вправо, взаимодействующего своим пазом 15 со сферическим концом рычага 16.
После укладки заготовки на матрицу 7 рука манипулятора выводится из зоны пресса, производится вытяжка и образуется полая деталь с фланцем и обрезка его на той же позиции щтампа.
Затем одновременно подается команда на перемещение руки манипулятора к рабочей зоне пресса и толкателю 6 на выталкивание отщтампованного стакана 5 и обрезанного кольцевого отхода 9 из матрицы 7. Поскольку ход толкателя меньще расстояния, на которое перемещается рука манипулятора, сначала отштампованный стакан 5 и отделенное от него кольцо 9 устанавливаются в верхнее положение и кольцевой отход 9 размещается на верхнем торце стакана 5, а затем подходит к рабочей зоне пресса рука манипулятора. При движении штока 2 с кулачком 1 захватной головки влево по чертежу кулачок 1 взаимодействует с роликом 10 рычага 11, поворачивает его, преодолевая сопротивление пружины 14, и устанавливает поворотную губку 13 напротив губки 4.
Если скоба 19 с установленными на ней захватами 20 жестко закреплена на рычаге 11 (как показано на фиг. 1), то при повороте рычага 11 в позицию захвата отщтампованного стакана она своими магнитными, электромагнитными или вакуумными захватами осуществляет захват отрезанного кольцевого отхода. При дальнейшем перемещении щтока 2 с кулачком 1 влево происходит зажим стенки отштампованного стакана между губками 13 и 4.
Таким образом, происходит одновременный захват стакана и кольцевого отхода. Затем рука манипулятора выводится иззоны пресса, транспортируя одновременно отщтампованный стакан и кольцевой отход. При перемещении руки из зоны пресса она осуществляет укладку отштампованной детали в тару для готовых изделий и сброс кольцевых отходов в тару для сборки отходов.
Освобождение стакана от зажима губками 13 и 4 происходит при перемещении щтока 2 с кулачком 1 вправо по чертежу.
Освобождение кольцевого отхода от захватов 20 скобы 19 производится, например, путем отключения электромагнитов, развакуумирования полости захватных вакуумных чашек и т. п.
Если скоба 19 с установленными на ней захватами закреплена на корпусе захватной головки 3, то уже одновременного захвата стакана и отхода осуществить нельзя. Однако такое закрепление скобы все же позволяет осуществить захват кольцевого отхода из позиции укладки листовой заготовки на зеркало матрицы без дополнительного горизонтального перемещения руки. В этом случае захват кольцевого отхода и стакана и транспортировка их на позиции складирования осуществляются манипулятором последовательно.
В ряде случаев именно такое последовательное удаление кольцевого отхода и отштампованного стакана из зоны пресса, несмотря на некоторую потерю в производительности, является наиболее целесообразным, например при раздельном выталкивании из матрицы сначала кольцевого отхода, а затем отштампованного стакана, что определяется соответствующей конструкцией выталкивателя пресса.
При закреплении скобы 19 с захватами 20 на корпусе захватной головки захват кольцевого отхода осуществляется путем дополнительного вертикального перемещения захватной головки вверх и вниз, в зависимости от места крепления скобы к корпусу захватной головки, при этом скоба 19 с захватами 20 подходит снизу или сверху к кольцевому отходу и осуществляет захват отхода захватами 20.
После удаления манипулятором кольцевого отхода рука опять подводится в позицию укладки листовой заготовки и осуществляет захват стакана за стенку между губками 13 и 4, как было описано выше.
В ряде случаев щирина кольцевого отхода может оказаться недостаточной для надежного захвата его скобой с захватами, жестко закрепленной на корпусе захватной головки, возможны переносы отрезанного кольцевого отхода на торце стакана при выталкивании из матрицы. В этом случае предлагается выполнить скобу в виде Гили С-образных пластин 22, шарнирно закрепленных на корпусе захватной головки и подпружиненных одна относительно другой пружиной 23.
В этом случае захват кольцевого отхода осуществляется следующим образом. При горизонтальном движении руки в положение укладки листовой заготовки на зеркало матрицы пластины скобы, натыкаясь на тело корпуса вытолкнутого стакана, благодаря щарнирному закреплению их на корпусе захватной головки и направляющим скосам, выполненным на пластинах, разводятся в стороны, а затем при дальнейшем движении под действием пружин 23 плотно охватывают тело стакана. При последующем вертикальном перемещении руки, несущей захватную головку, пластины, скользя по корпусу стакана, устанавливают на стакане отход в горизонтальное положение, если он был перекошен, а затем осуществляют захват отхода своими захватами.
Предложенное приспособление позволяет значительно повысить надежность работы захватной головки кисти руки манипулятора и повысить производительность труда.
Формула изобретения
1.Приспособление к манипулятору для захвата и удаления полых деталей по авт. св. № 527286, отличающееся тем,что,с целью обеспечения возможности переноса и укладки листовых заготовок на зеркало матрицы, захватная головка снабжена скобой со смонтированными на ней захватами, в частности магнитными, электромагнитными или вакуумными.
2.Приспособление по п. 1, отличающееся тем, что, с целью повышения производительности работы манипулятора путем обеспечения возможности одновременного захвата стакана и отрезанного от него кольцевого отхода, скоба жестко закреплена на зажимной поворотной губке.
3.Приспособление по п. 1, отличающееся тем, что, с целью исключения необходимости дополнительного горизонтального перемещения руки манипулятора, скоба закреплена на корпусе захватной головки.
4.Приспособление по пп. 1 и 3, отличающееся тем, что скоба выполнена в виде двух пластин, щарнирно установленных на оси, закрепленной в корпусе, и подпружиненных одна относительно другой.
.А.
Ф
7J
фиг. 2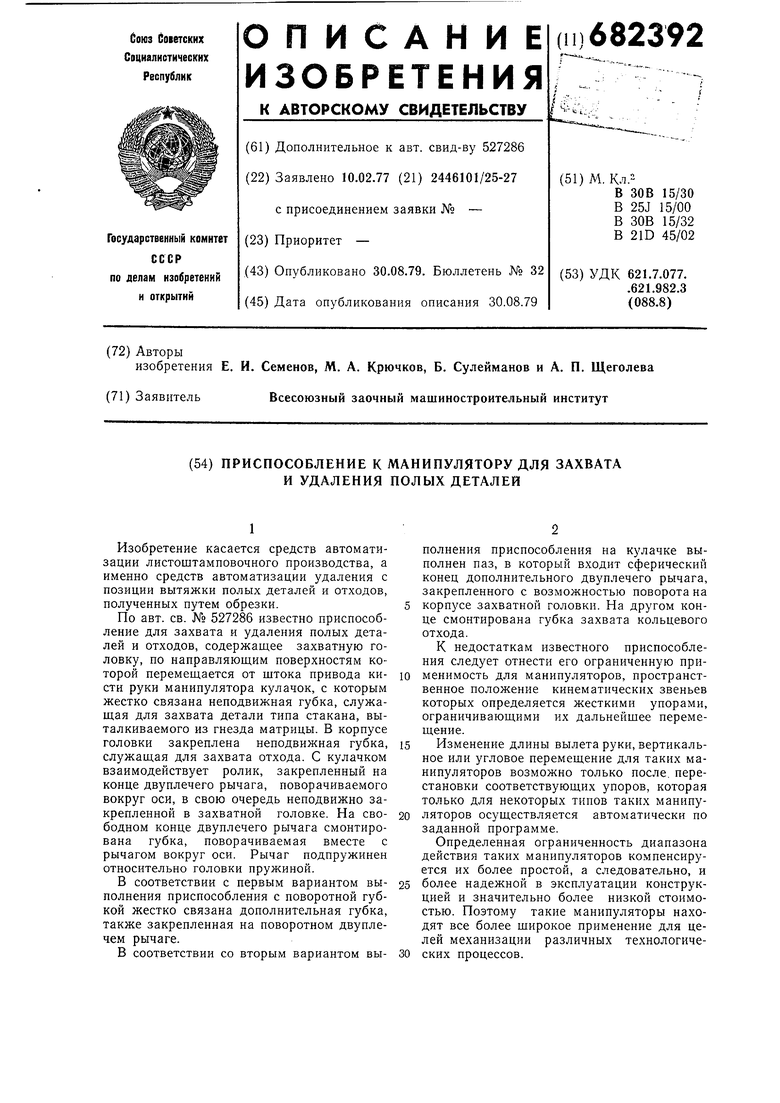
| название | год | авторы | номер документа |
|---|---|---|---|
| Приспособление к манипулятору для захвата и удаления полых деталей | 1981 |
|
SU990504A2 |
| Приспособление к манипулятору для захвата и удаления полых деталей | 1975 |
|
SU527286A1 |
| Захватный орган манипулятора | 1977 |
|
SU721324A1 |
| Автоматизированный комплекс для штамповки | 1985 |
|
SU1328036A1 |
| Автоматизированный комплекс для многопереходной штамповки | 1982 |
|
SU1013042A1 |
| Автоматизированный комплекс для штамповки крупногабаритных деталей | 1985 |
|
SU1324725A1 |
| Рука механическая к обрабатывающей машине | 1977 |
|
SU725865A1 |
| Манипулирующее устройство | 1978 |
|
SU789190A1 |
| УСТРОЙСТВО для ПОДАЧИ ЗАГОТОВОК В РАБОЧУЮ ЗОНУ ПРЕССА И УДАЛЕНИЯ ИЗ НЕБ ОТШТАМПОВАННЫХДЕТАЛЕЙ | 1972 |
|
SU421545A1 |
| МНОГОПОЗИЦИОННОЕ ЗАХВАТНОЕ УСТРОЙСТВО МАНИПУЛЯТОРА | 1992 |
|
RU2033918C1 |
TI Tt п 10 15 1 г
W///////////A
Фиг. 7
