Изобретение относится к области машиностроения, а именно к манипуляторам для механизации и автоматизации производственных процессов.
Известен захват манипулятора дЛя Механиэации и автоматизации производственных процессов, в котором содержатся зажимные губки, установленные на корпусе и соединенные с приводом шарнирными многозвенниками, кинематически связанными, между сог бой зубчатой передачей, на каждом из секторов которой жестко закреплено звено одного из шарнирных многозвенников 1.
Недостатком указанного захвата его невысокая надежность вследствие отсутствия регулирования рабочего усилия.
Наиболее близким техническим решением к изобретению является захват, в котором губки приводятся от привода линейного перемещения, соединенного с этими губками, шарнирными многозвенниками, кинематически связанным между собой 2.
Указанный захват недостаточно надежен вследствие возможности регулирования рабочего усилия только изменением давления в цилиндре.
Целью изобретения является повышение надежности путем регулирования рабочего усилия.
Указанная цель достигается тем, что секторы зубчатой передачи снабжены регулируемым упором и подпружинены относительно корпуса в сторону губок, а звено шарнирного многозвенника, закрепленное на секторе зубчатой передачи, выполнено ввиде эксцентриковой оси.
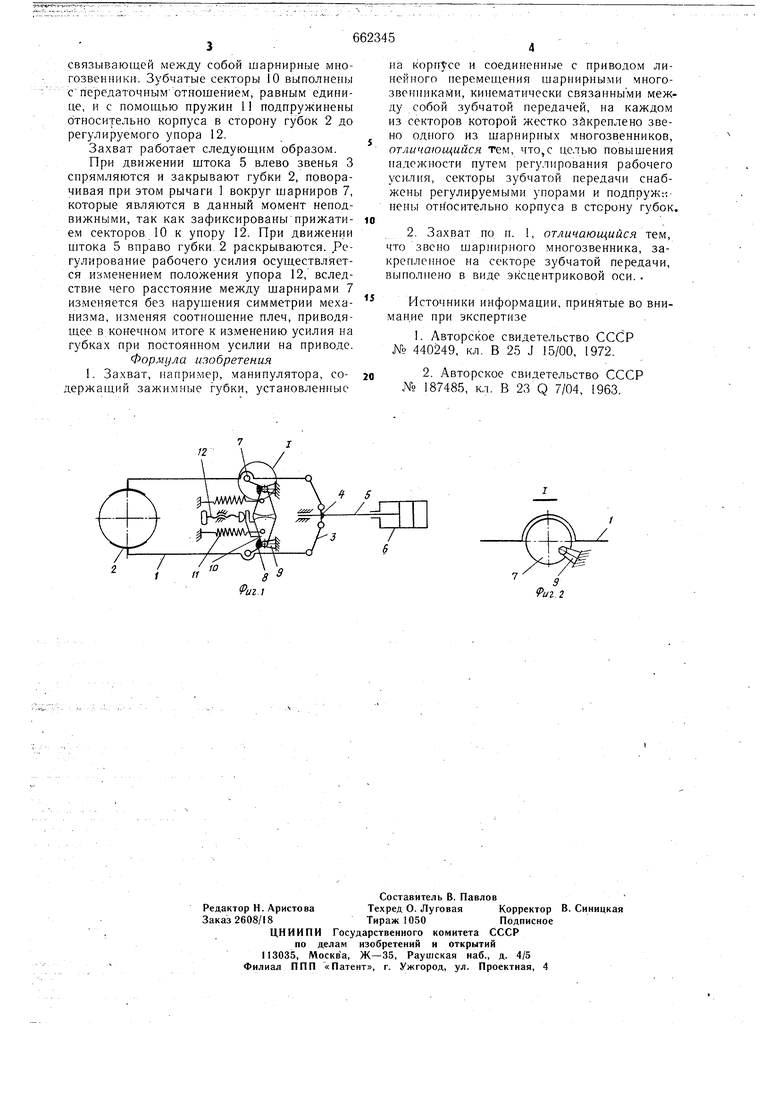
.,На фиг. 1 изображена кинематическая
схема захвата; на фиг. 2 - звено в виде эксцентриковой оси, вариант выполнения.
Захват состоит из двуплечих рычагов 1, входяших в состав шарнирных многозвенников, соединяющих зажимные губки 2 с
приводом линейного перемещения и корпусом захвата. Распорные звенья 3 связывают концы рычагов 1 с крестовиной 4, жестко закрепленной на штоке 5 привода линейного перемещения, например силового цилиндра 6.
Шарннры 7 рычага 1 расположены на звеньях 8, установленных на шарнирных опорах 9. Звено 8 одного из щарнирных многозвенников жестко закреплено на каждом из секторов 10 зубчатой передачи, кинематически связывающей между собой шарнирн 1е многозвенники. Зубчатые секторы 10 выполнены с передаточнымотношением, равным единице, и с помощью пружин 11 подпружинены относительно корпуса в сторону губок 2 до регулируемого упора 12. Захват работает следующим образом. При движении штока 5 влево звенья 3 спрямляются и закрывают губки 2, поворачивая при этом рычаги 1 вокруг шарниров 7, которые являются в данный момент Неподвижными, так как зафиксированыприжатием секторов. 10 к упору 12. При движении штока 5 вправо губки 2 раскрываются. Регулирование рабочего усилия осуществляется изменением положения упора 12, вследствие чего расстояние между шарнирами 7 изменяется без нарушения симметрии механизма, изменяя соотношение плеч, приводящее в конечном итоге к изменению усилия на губках при постоянном усилии на приводе. Формула изобретения 1. Захват, например, манипулятора, содержащий зажимные губки, установленные на Kopnjce и соединенные с приводом линейного перемещения шарнирными многозвенниками, кинематически связанными между собой зубчатой передачей, на каждом из секторов которой жестко закреплено звено одного из шарнирных многозвенников, отличающийся тем, что,с целью повышения надежности путем регулирования рабочего усилия, секторы зубчатой передачи снабжены регулируемыми упорами и подпружинены относительно корпуса в сторону губок. 2. Захват по. п. 1, отличающийся тем, что звено шарнирного многозвенника, закрепленное на секторе зубчатой передачи, выполнено в виде эксцентриковой оси. . Источники информации, принятые во вниман.ие при экспертизе 1. Авторское свидетельство СССР № 440249, кл. В 25 J 15/00, 1972. 2. Авторское свидетельство СССР № 187485, кл. В 23 Q 7/04, 1963.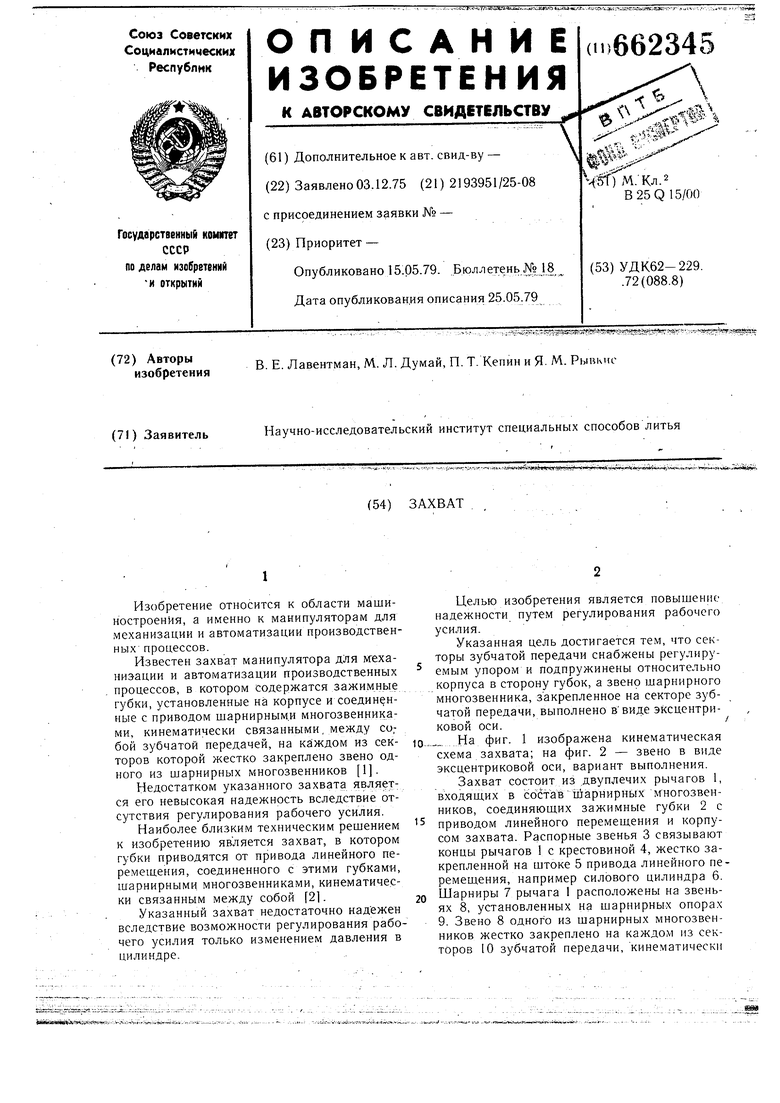
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват промышленного робота | 1979 |
|
SU841962A1 |
| Захват промышленного робота | 1981 |
|
SU963852A1 |
| Захват манипулятора | 1982 |
|
SU1024272A1 |
| Захват | 1972 |
|
SU440249A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1989 |
|
RU2044620C1 |
| Адаптивный захват | 1988 |
|
SU1542796A1 |
| Манипулятор | 1980 |
|
SU874329A1 |
| ЗАХВАТ | 2000 |
|
RU2175910C1 |
| Захват промышленного робота | 1980 |
|
SU891435A1 |
| Захват | 1976 |
|
SU558789A1 |
(Ztfz./
