Изобретение относится к технике обработки сигналов и может быть использовано в радионавигации, радиолокации и в системах синхронной связи, а также в радиогеодезических системах с дальномерным способом определения координат.
Цель изобретения - уменьшение времени поиска.
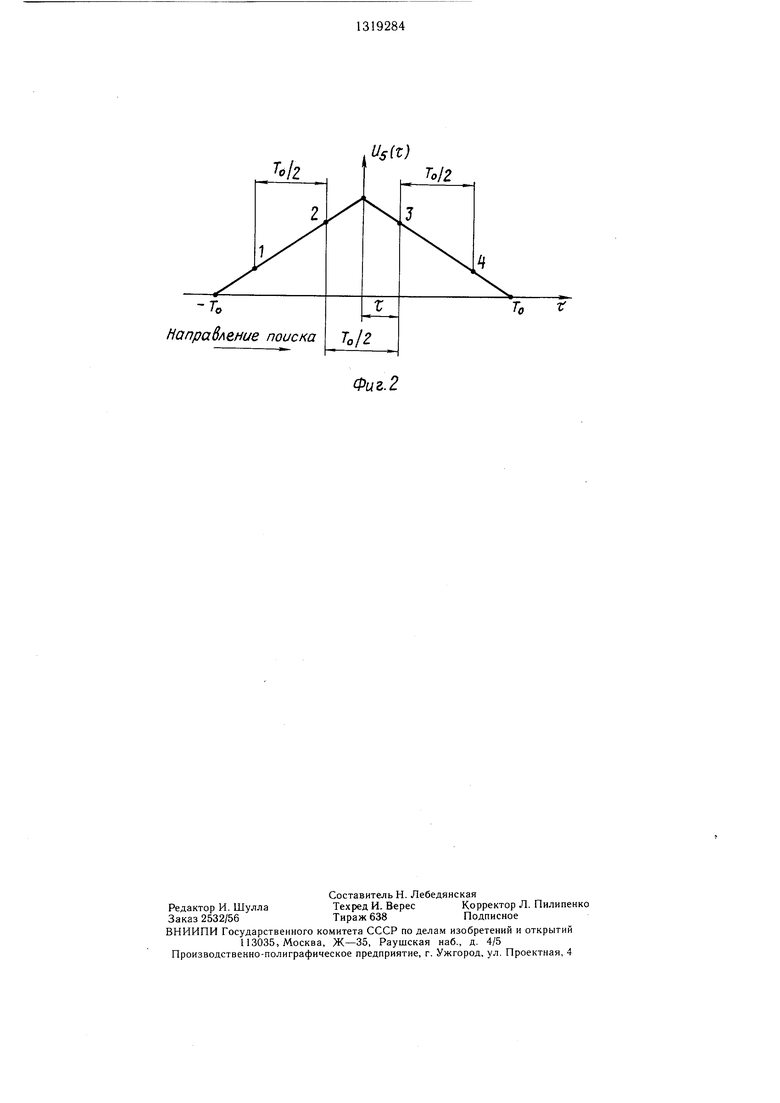
На фиг. 1 представлена структурная электрическая схема устройства поиска шумо- подобного сигнала по времени и частоте; на фиг. 2 - график зависимости сигнальной составляющей выходной величины квадратурного коррелятора от временного сдвига входного сигнала относительно опорной копии. .. .
Устройство содержит первый квадратурный коррелятор 1, первый блок 2 памяти, первый умножитель 3 на три, сумматор 4, второй квадратурный коррелятор 5, второй умножитель 6 на три, второй блок 7 памяти, генератор 8 копий сигнала, формирователь 9 управляющих сигналов и пороговый блок 10.
Устройство поиска шумподобного сигнала по времени и частоте работает следующим образом.
В течение времени анализа в одной точке интервала поиска генератор 8 копий сигнала генерирует копии принимаемого сигнала, причем на первом выходе формируется копия, опережающая копию на втором выходе на один элемент разрещения по времени, т.е. для дискретного щумоподобного сигнала на длительность одного элементарного импульса. Результаты накопления с выхода первого квадратурного коррелятора 1 поступают на первый вход сумматора 4 и записываются в первый блок 2, памяти, причем та величина, которая записывается в первый блок 2 памяти по окончании анализа в предыдущей точке интервала поиска в тот же момент времени, умноженная на три в первом умножителе 3, подается на второй вход сумматора 4. С выхода второго квадратурного коррелятора 5 результат накопления, умноженный на три во втором умножителе 6, поступает на третий вход сумматора 4 и записывается во второй блок 7 памяти, а результат, накопленный во втором корреляторе 5 в предыдущей точке интервала поиска, из второго блока 7 памяти попадает на четвертый вход сумматора 4. Сумма величин, поданных на все четыре входа сумматора 4, с его выхода поступает на вход порогового блока 10. Если порог не превышен, то формирователь 9 перестраивает генератор 8 копий сигнала на формирование копий, сдвинутых по времени относительно прежнего своего положения на половину длительности элементарного импульса шумоподобного сигнала То/2. Таким образом, копии сигнала
0
5
0
5
0
5
перемещаются в пределах интервала поиска по времени. Дойдя- до границы интервала задержек, формирователь 9 перестраивает частоту копий сигнала и снова повторяется поиск во всем интервале временной неопределенности. Как только в одной из точек интервала поиска порог превышается, формирователь 9 прекращает дискретную перестройку задержки копий сигнала. Поиск на этом заканчивается (фиг. 2). Ординаты 1-4-й точек равны сигнальным составляющим величин на входах сумматоров 4 соответственно. Шумовые составляющие величин на 1-4-м входах сумматора 4 попарно некоррелированы, а также некоррелированы щумовые составляющие копий на первом и втором выходах генератора 8 копий сигнала. По той же причине некоррелированы шумы на втором и четвертом входах. Некоррелированность же шумов на первом и втором, третьем и четвертом, первом и четвертом входах, а также на втором и третьем входах объясняется тем, что они образуются из различных реализаций входного процесса, так как относятся к различным точкам интервала поиска, анализируемым в различные неперекрывающиеся соседние интервалы времени. На вход сумматора 4 результаты анализа в соседних точках интервала поиска попадают одновременно из-за того, что выходные величины первого и второго квадратурных корреляторов 1 и 5, полученные в предыдущем интервале анализа, хранятся в первом и втором блоках 2 и 7 памяти до окончания анализа в текущем интервале анализа, проводимом в очередной точке интервала поиска.
Формула изобретения
5
Устройство поиска шумоподобного сигнала по времени и частоте, содержащее последовательно соединенные сумматор, пороговый блок, формирователь управляю0 щих сигналов, генератор копий сигнала, первый и второй выходы которого подключены соответственно к первым входам первого и второго квадратурных корреляторов, вторые входы которых соединены и являются входом устройства, при этом выход первого квадратурного коррелятора соединен с первым входом сумматора, отличающееся тем, что, с целью уменьщения времени поиска, введены последовательно соединенные первый блок памяти и первый умножиQ тель на три, выход которого соединен с вторым входом сумматора, а также второй умножитель на три и второй блок памяти, входы которых соединены с выходом второго квадратурного коррелятора, при этом выход первого квадратурного коррелятора соединен
5 с входом первого блока памяти, а выходы второго умно сителя на три и второго блока памяти соединены соответственно с третьим и четвертым входами сумматора.
Чг
-TO
Направление поиска
Us (I)
TolZ
Таt
Фиг.2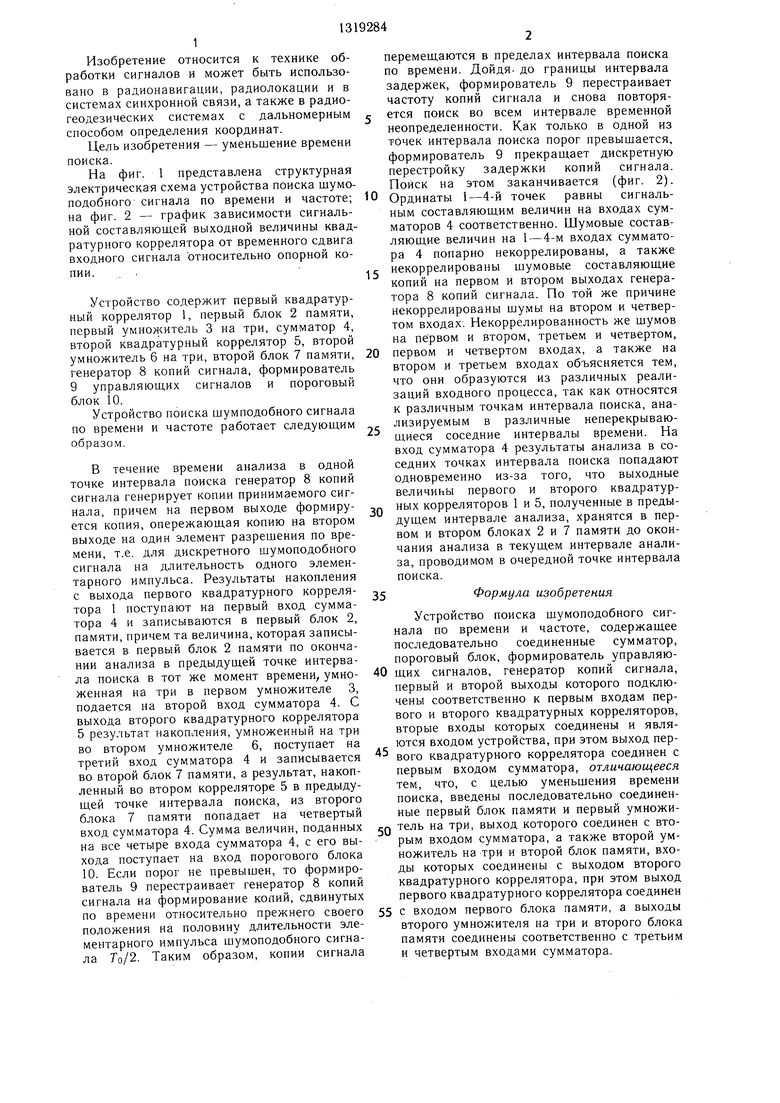
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения взаимной корреляционной функции | 1990 |
|
SU1751779A1 |
| УСТРОЙСТВО ПРИЕМА И ПЕРЕДАЧИ ФАЗОМАНИПУЛИРОВАННЫХ КОДОВЫХ СИГНАЛОВ | 2002 |
|
RU2236086C2 |
| ИЗМЕРИТЕЛЬ ОТНОШЕНИЯ СИГНАЛ-ШУМ | 1992 |
|
RU2117954C1 |
| СПОСОБ ПОИСКА МНОГОЛУЧЕВОГО ШИРОКОПОЛОСНОГО СИГНАЛА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ, СПОСОБ ОБНАРУЖЕНИЯ И ОЦЕНКИ РАЗМЕРА КЛАСТЕРА СИГНАЛОВ ЛУЧЕЙ И БЛОК, ЕГО РЕАЛИЗУЮЩИЙ | 2001 |
|
RU2208916C1 |
| Многочастотный приемник сигналов Глобальных Навигационных Спутниковых Систем | 2021 |
|
RU2787076C1 |
| Устройство определения координат объекта | 1988 |
|
SU1562980A1 |
| СПОСОБ ОБНАРУЖЕНИЯ ШИРОКОПОЛОСНЫХ СИГНАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2470459C1 |
| ПРИЕМНИК СПУТНИКОВОЙ НАВИГАЦИИ С УСТРОЙСТВОМ БЫСТРОГО ПОИСКА НАВИГАЦИОННЫХ СИГНАЛОВ В УСЛОВИЯХ ВЫСОКОЙ ДИНАМИКИ ОБЪЕКТА | 2006 |
|
RU2341898C2 |
| СПОСОБ ПРИЕМА МНОГОЛУЧЕВОГО СИГНАЛА, СПОСОБ ПОИСКА И СПОСОБ ФОРМИРОВАНИЯ МЯГКИХ РЕШЕНИЙ ПРИ ПРИЕМЕ МНОГОЛУЧЕВОГО СИГНАЛА И УСТРОЙСТВА, ИХ РЕАЛИЗУЮЩИЕ | 2003 |
|
RU2251802C1 |
| УСТРОЙСТВО ПОИСКА НАВИГАЦИОННЫХ СИГНАЛОВ | 2007 |
|
RU2334357C1 |
Изобретение может использоваться в радионавигации, радиолокации, системах синхронной связи и обеспечивает уменьшение времени поиска. Устройство содержит квадратурные корреляторы (КК) 1 и 5. блоки 2 и 7 памяти (БП), умножители 3 и 6 на три, сумматор 4, генератор 8 копий сигнала (КС), формирователь 9 управляющих сигналов и пороговый блок 10. В течение времени анализа в одной точке интервала поиска генератор 8 генерирует копии принимаемого сигнала таким образом, что КС на одном выходе опережает КС на другом выходе на одип элемент разрешения по времени. Результат накопления с КК 1 записывается в БП 2 и поступает на сумматор 4. На сумматор 4 поступают также величина из БП 2, записанная в предыдущей точке интервала поиска, умноженная на три, результат накопления КК 5, умноженный на три, и результат накопления КК 5 в предыдущей точке интервала поиска, записанный в БП 7. Результат сложения поступает на пороговый блок 10. Если порог не превышен, то формирователь 9 перестраивает генератор 8 таким образом, что КС перемещаются во времени в пределах интервала поиска. Если порог превышен, поиск заканчивается. За счет введения БП 2 и 7 и умножителей 3 и 6 обеспечивается некоррелированность щумов и уменьшение времени поиска. 2 ил. ffi (Л со со N3 СХ) 
| Шумоподобные сигналы в системах передачи информации/Под, ред | |||
| В | |||
| Б | |||
| Пест- рякова., М.: Советское радио, 1973, с | |||
| Способ приготовления хлебного вина | 1925 |
|
SU424A1 |
