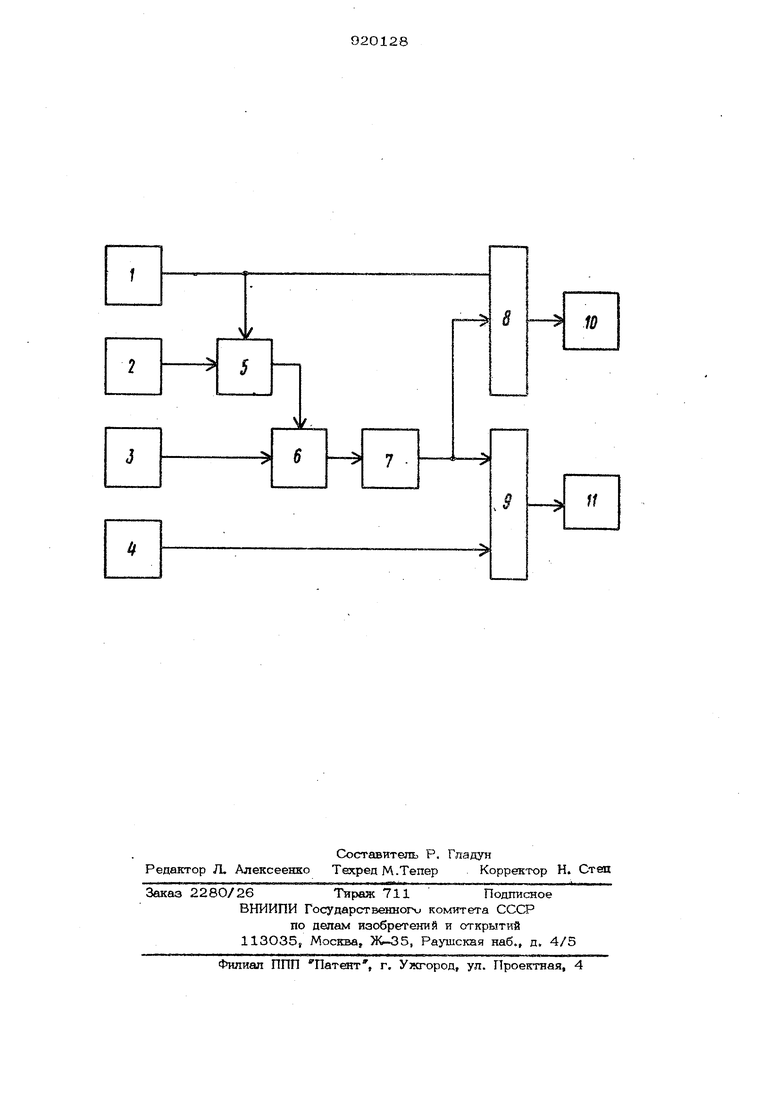
Устройство состоит из датчика 1 вре мени копания, датчика 2 оборотов двигателя привода, датчика 3 момента па его валу и датчика 4 перемощенного грунта за цикл электронных к аочей 5 и 6, сум матера 7, дел11телъных устройств 8 и 9 и индикаторов использовахтой средней мощности 10 и эффективности нроцесса копания 11. Устройство работает следующим обра зом. С. начала процесса копания на апектронный ключ 5 от датчика 1 времени подается сигнал и нри казклом оборо те двигателя привода по сигналу датчика 2 на выходе ключа 5 появляется сигнал 1. При этом информация о моменте на валу двигателя с датчика 3 за его дый оборот через щпоч 6 проходит и запоминается в сумматоре 7, а за время копшгия в нем фиксируется произведенная приводом работа, определяемая выражеiffieM|:-к.г: Miut Ньл где К - коэффициент пропорциональности П- - частота вращения вала дв ггателя привода, рад/с; . - момент на валу двигателя, Нм| ; - время измерения момента на валу двигателя, с. Информация о перемещенной горной массе за цикл экскавации выдается датчиком 4 и Поступает в делительный блок 9, на второй вход которого подается ре- зупьтат из сумматора 7. С выхода делительного устройства 9 результат поступает в индикатор э( тивности процесса копания 11 и определяется выражением . К : о5 где At - работа произведетшая механизмом тяги Б процессе копания. в -том цикле, HMJ Qy - вес перемещешюго грунта (в цикле, т. Формула (2) выражает энергозатраты процесса копания экскаватора и минимизация данного показатеття приводит к угленьшеггаю затрсченной работы, оттределенная часть которой идет на износ. На выходе делите-шного устройства 8 получается pev yльтaт соотношения произ- ведегшсй приводом тяги работы в процессе копания А и врем€;ни копантш il и ф;жс1груется индикатором средней мощности 10, показывая штенсивность нопользования мощности привода. Исполтизоваттее предлагаемого устройства для,контрапя работы экскаватора позволяет вести учет затраченной работы на единицу полезной продукции (вес перемещенной горной массы). Минимизация энергозатрат при копании позволит повысить как наделшость vrexaнизмoв привода тяги (и в целом экскаватора), так и эффект нвность работы экскаватора. Формула изобретенИ я Устройство этгя контроля работы экскаватора} включающее датчик оборотов и датчик момента на валу двигателя, датчики времени копазгия и перемеще гао- го грунта за цикл, ключевые элементы,, два дапительных блока, сумматор и тшикатор опенки эфс зектипности работы экскаватора, к входу которого подключен выход одного из делительшзгх блоков, отличающееся тем, что, с делгзЮ повышения надеткности контроля путем исюиочения динам1-1ческих нагрузок в меха1шзмах тяги экскаватора, оно снабжено .mmvucaTopoM использованной средней мощности, к входу которого подключен выход второго делительного блока, к одному из входов которого подключен дат чик времеш копания, а к второму входу и к одному из входов первого делительного блока подключен ныход сумматора, к входу KOTopoi-o черэз дв.а последовательно соединенных ключевых, элемента подключены датчики времени копания и оборотов двигателя и через второй клю чевой элемент « датчик момента на валу привода, а датчик пepe eщeтшoгo грунта за цикл подключек: к второму входу первого ;деш телъного элемента. Источз-1ики информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР 502100, Ш1, Е 02Р 9/20, 1973. 2.Авторское свидетельство СССР № 540990, кл, Е 02 Г 9/20, 1973.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля работы экскаватора | 1973 |
|
SU540990A1 |
| Устройство диагностики состояния рабочего органа роторного экскаватора | 1987 |
|
SU1479574A1 |
| Устройство для контроля и учета работы добычного роторного экскаватора | 1983 |
|
SU1145089A1 |
| Устройство для учета и контроля работы экскаватора | 1979 |
|
SU872668A1 |
| Способ автоматического управления процессом копания на одноковшовых экскаваторах и устройство для его осуществления | 1981 |
|
SU977623A1 |
| Устройство выбора слабины подъемных канатов экскаваторов-драглайнов | 1980 |
|
SU939674A1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ КОПАНИЯ ДРАГЛАЙНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2130998C1 |
| Устройство автоматического управления процессом копания драглайна | 1982 |
|
SU1063950A1 |
| Способ управления процессом черпания экскаватора-драглайна и устройство для его осуществления | 1980 |
|
SU910957A1 |
| Система стабилизации нагрузки рабочего органа роторного экскаватора | 1989 |
|
SU1767104A1 |