132
ние технологических возможностей и повьшение эффективности применения промышленного робота за счет взаимного расположения составных частей установки, наличия дополнительного магазина и снабжения средней руки трехрукого робота механизмом сдвига схватов. Установка для отделения листовых заготовок от стопы, подачи в пресс и удаления обработанного материала содержит связанные системой 4 питания и управления с прессами 1, 2 трехрукий робот 3, на руках которого установлены схваты 5, 6, 7, 16 с возможностью возвратно-поступательного пере1
Изобретение относится к обработке металлов давлением, в частности к ав томатизирующим устройствам, и может быть использовано при автоматизации листоштамповочного производства, на- пример, в автоматических линиях различных- отраслей машиностроения.
Цель изобретения - расширение технологических возможностей и повышени эффективности применения промьпилен- ного робота путем осуществления наряду с двухоперационной штамповкой однооперационной штамповки двух заготовок, размеры и технология которых не позволяют устанавливать их в штамп более одной.
I
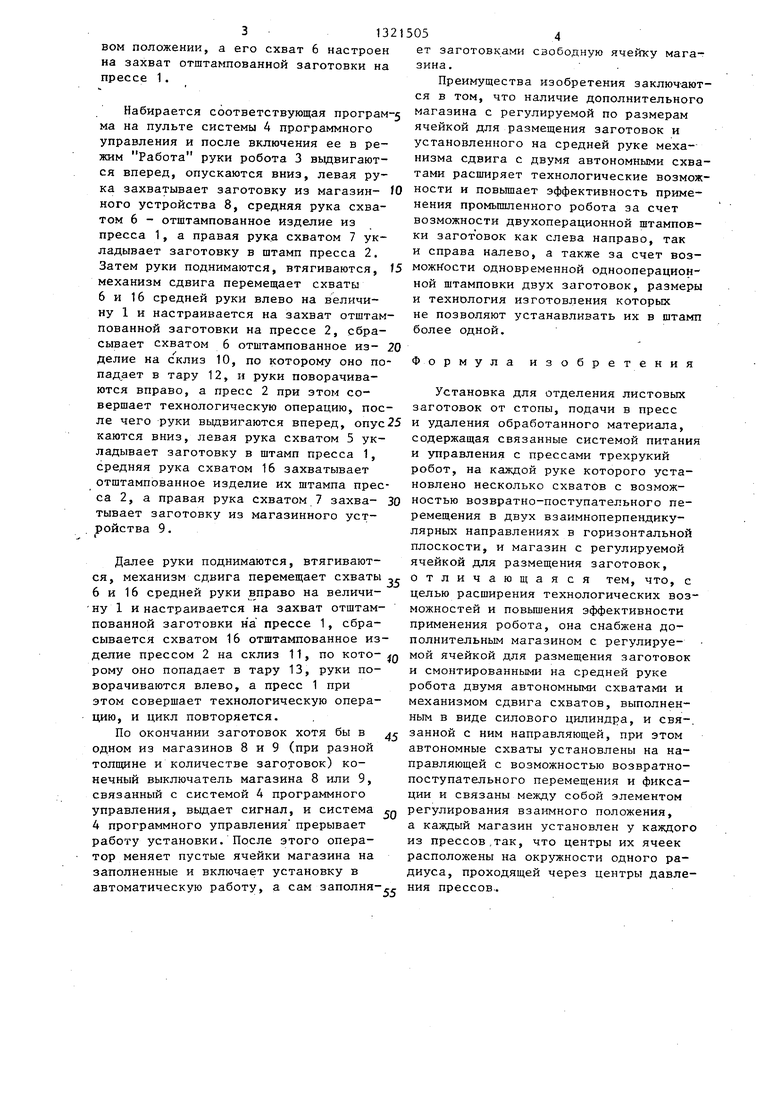
. На фиг. 1 изображена предлагаемая установка, обслуживающая два пресса;; на фиг. 2 - механизм сдвига с двумя автономными схватами; на фиг. 3 - разрез А-А на фиг. 2.
В -состав установки, связанной с двумя прессами 1 и 2, входят трех- рукий робот 3 с системой 4 программного управления, оснащенньш схватам 5-7 с присосками, расположенными таким образом, что оси схватов 5 и 7 расположены на оси симметрии рабочих ячеек магазинов 8 и 9 и прессов 1 и соответственно, а схват 6 имеет возможность располагаться на этих осях си 1метрии.
Транспортные устрйоства (склизы) lOn 11 расположены таким образом, что обеспечивается связь Соответству
505
мещения в двух взаимноперпендикуляр- ных направлениях в горизонтальной . плоскости и магазин 8 с регулируемой по размерам ячейкой для размещения заготовок. Установка снабжена дополнительным магазином 9 с регулируемой по размерам ячейкой для размещения Заготовок, а средняя рука трехрукого робота - механизмом сдвига, несущим два автономных схвата 6, 16, Каждый из магазинов 8, 9 установлен с одной из сторон калздого пресса 1, 2. а центры их рабочих ячеек расположены на одном радиусе, проходящем через центр давления прессов 1,2.3 ил.
г
5
0
ющей руки со схватами 5-7 с тарой 12 и 13 готовых деталей.
На средней руке робота 3 установлен механизм сдвига в виде силового цилиндра 14 с направляющей 15, на которой на расстоянии 1 друг от друга установлены схваты 6 и 16 с вакуумными присосками с возможностью регулироваться с помощью винта 17, имеющего левую и правую резьбу, и фиксироваться гайками 18.
Установка работает следующим образом.
В магазинные устройства 8 и 9 перед началом работы оператор загружает четыре стопы заготовок (по две стопы каждой детали или четыре стопы одной детали, если производится штамповка одной детали в двух прессах 1 и 2).
Далее с помощью винта 17 (фиг. 2) настраивается расстояние 1 между схватами 6 и 16 таким образом, чтобы при перемещении механизма сдвига влево на величину 1 ось схвата 6 совпадала с осью, проходящей через центр давления штампа пресса 1, а в правом положении ось схвата 16 с центром давления штампа пресса 2, и винт за- контривается гайками 18.
I
Б начале цикла руки робота 3 втянуты и повернуты влево, в штампе : пресса 1 находится отштампованная на нем заготовка, а в схвате 7 правой руки робота 3 установлена заготовка из магазинного устройства 9, механизм сдвига средней руки находится в праBOM положении, a его схват 6 настроен на захват отштампованной заготовки на прессе 1.
Набирается соответствующая програм-5 магазина с регулируемой по размерам
ма на пульте системы 4 программного управления и после включения ее в режим Работа руки робота 3 вьщвигают- ся вперед, опускаются вниз, левая руячейкой для размещения заготовок и установленного на средней руке механизма сдвига с двумя автономными схв тами расширяет технологические возмо
нения промьшшенного робота за счет возможности двухоперационной штамповки загот овок как слева направо, так и справа налево, а также за счет воз- f5 можйости одновременной однооперацион- ной штамповки двух заготовок, размеры и технология изготовления которых не позволяют устанавливать их в штамп более одной.
ка захватывает заготовку из магазин- iO ности и повьш1ает эффективность приме- ного устройства 8, средняя рука схва- том 6 - отштампованное изделие из пресса 1, а правая рук.а схватом 7 укладывает заготовку в штамп пресса 2. Затем руки поднимаются, втягиваются, механизм сдвига перемещает схваты 6 и 16 средней руки влево на величину 1 и настраивается на захват отштампованной заготовки на прессе 2, сбрасывает схватом 6 отштампованное из- 20 делие на склиз 10, по которому оно попадает в тару 12, и руки поворачиваются вправо, а пресс 2 при этом совершает технологическую операцию, после чего руки вьщвигаются вперед, опус25 каются вниз, левая рука схватом 5 укладывает заготовку в штамп пресса 1, средняя рука схватом 16 захватывает отштампованное изделие их штампа пресса 2, а правая рука схватом 7 захва- 30 тывает заготовку из магазинного устройства 9.
Ф о рмула изобретения
Установка для отделения листовых заготовок от стопы, подачи в пресс и удаления обработанного материала, содержащая связанные системой питания и управления с прессами трехрукий робот, на каждой руке которого установлено несколько схватов с возможностью возвратно-поступательного перемещения в двух взаимноперпендику- лярных направлениях в горизонтальной плоскости, и магазин с регулируемой ячейкой для размещения заготовок.
Далее руки поднимаются, втягиваются, механизм сдвига перемещает схваты .. отличающаяся тем, что, с
6 и 16 средней руки вправо на величи- ну 1 и настраивается на захват отштампованной заготовки н а прессе 1, сбрасывается схватом 16 отштампованное изделие прессом 2 на склиз 11, по кото- Q рому оно попадает в тару 13, руки поворачиваются влево, а пресс 1 при этом совершает технологическую операцию, и цикл повторяется.
45
По окончании заготовок хотя бы в одном из магазинов 8 и 9 (при разной толщине и количестве заготовок) конечный выключатель магазина 8 или 9, связанный с системой 4 программного управления, выдает сигнал, и система 4 программного управления прерывает работу установки. После этого оператор меняет пустые ячейки магазина на заполненные и включает установку в автоматическую работу, а сам заполня50
целью расширения технологических возможностей и повьш ения эффективности применения робота, она снабжена дополнительным магазином с регулируе- мой ячейкой для размещения заготовок и смонтированными на средней руке робота двумя автономными схватами и механизмом сдвига схватов, выполненным в виде силового цилиндра, и свя-. занной с ним направляющей, при этом автономные схваты установлены на направляющей с возможностью возвратно- поступательного перемещения и фиксации и связаны между собой элементом регулирования взаимного положения, а каждый магазин установлен у каждого из прессов,так, что центры их ячеек расположены на окружности одного радиуса, проходящей через центры давления прессов.
ет заготовками свободную ячейку магазина.
Преимущества изобретения заключаются в том, что наличие дополнительного
магазина с регулируемой по размерам
ячейкой для размещения заготовок и установленного на средней руке механизма сдвига с двумя автономными схватами расширяет технологические возможнения промьшшенного робота за счет возможности двухоперационной штамповки загот овок как слева направо, так и справа налево, а также за счет воз- можйости одновременной однооперацион- ной штамповки двух заготовок, размеры и технология изготовления которых не позволяют устанавливать их в штамп более одной.
ности и повьш1ает эффективность приме-
ности и повьш1ает эффективность приме-
Ф о рмула изобретения
Установка для отделения листовых заготовок от стопы, подачи в пресс и удаления обработанного материала, содержащая связанные системой питания и управления с прессами трехрукий робот, на каждой руке которого установлено несколько схватов с возможностью возвратно-поступательного перемещения в двух взаимноперпендику- лярных направлениях в горизонтальной плоскости, и магазин с регулируемой ячейкой для размещения заготовок.
целью расширения технологических возможностей и повьш ения эффективности применения робота, она снабжена дополнительным магазином с регулируе- мой ячейкой для размещения заготовок и смонтированными на средней руке робота двумя автономными схватами и механизмом сдвига схватов, выполненным в виде силового цилиндра, и свя-. занной с ним направляющей, при этом автономные схваты установлены на направляющей с возможностью возвратно- поступательного перемещения и фиксации и связаны между собой элементом регулирования взаимного положения, а каждый магазин установлен у каждого из прессов,так, что центры их ячеек расположены на окружности одного радиуса, проходящей через центры давления прессов.
/4
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая линия | 1982 |
|
SU1043036A1 |
| Магазинное устройство робототехнологического комплекса | 1987 |
|
SU1542669A1 |
| Роботизированный комплекс для многопереходной штамповки | 1983 |
|
SU1199368A1 |
| Гибкий производственный модуль для листовой штамповки | 1988 |
|
SU1667994A1 |
| Устройство для обработки плоских заготовок | 1983 |
|
SU1159696A1 |
| Автоматизированный комплекс для штамповки | 1987 |
|
SU1540907A1 |
| Установка для отделения листовых заготовок от стопы,подачи в пресс и удаления обработанного материала | 1982 |
|
SU1049265A1 |
| РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ МНОГОПЕРЕХОДНОЙ ШТАМПОВКИ | 1993 |
|
RU2082527C1 |
| Робототехнический комплекс | 1987 |
|
SU1416244A1 |
| Автоматизированный комплекс для штамповки листовых заготовок | 1982 |
|
SU1061896A1 |

Изобретение относится к обработке металлов давлением, в частности к автоматизирующим устройствам, и может быть использовано при автоматизации листоштамповочного производства, например, в автоматических линиях в различных отраслях машиностроения. Целью изобретения является расшире(Л со ю СП о ел иг. 1
| Установка для отделения листовых заготовок от стопы,подачи в пресс и удаления обработанного материала | 1982 |
|
SU1049265A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
