13233
Изобретение относктся к робототехнике, а точнее к принодам i о i с BHeuiHHMii магпитньт5-5 cHcrir Ць;/(ью пзо6ретен1-ш явл i i
точносгги позидионирозания i :i лри водяигих элемеп тов относит L.J а. i китиой системы.
На., фиг, 1 показан привод, разрез; на фиг, 2 - датчик положатся со ijy- пбм,
Предлагаемый привод содержит с ойки 1 , устатзовлеиные иа оспов.шгил в месте дозиционирования. Па CTot iK ix располагается магнитная система., включающая магнитопровод 2, натг )т:
мер, IIобразного типа,, с .сой
3 зозС 7;;дения и полюсными ::чи - ками 4з образующими 1иэздуи. 3, 5, Пe iaгпитньй защитный колпачок .; закрыиает якорь 7 (токопроводялцч .эзлвменты) 5 который на случ:ай пркме--- нения двигателя постоянного тока снабжен щеточньЕ4 узлом 8, VJ ;-- ;;L jjieii на валу 9, устаног) j.. подшилниках 10, Подшипники ycTai- i;:з-- лены и обойме 11. Муфтой 12 нал 9 соединен с валом редуктора 13 -: ;;jvji:i ориентирующей стет.(еии подвижности ро Редуктор 13 приводит в длН лсе™ нне ориентирутащую степень иодиижнос-- ти робота 1с-1ею1цего руку 14.
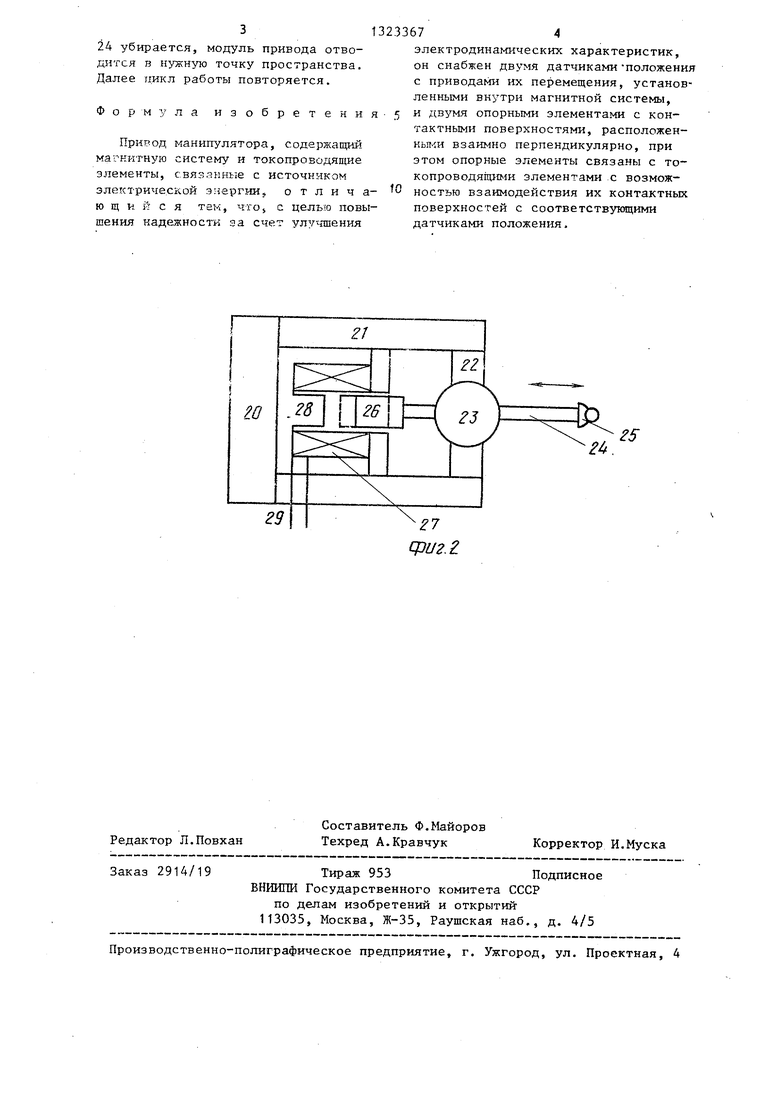
На колпачке 6 с пог-ювшю уго.тть:1 - к.;: 15 установлены опорные элелзенты i : и 17 с контактны ми псверхностямк:., расположенными во взаимно перпенд:нку лярн.ых плоскостях, -взаимодейстБ :у10 :ще с горизонтальным 18 к вертикальнг г 19 да Тчиками положения, которые У :;И-- фицированы, установлень на основани- ях 20 на магнитных системах, Каж;ц:ьй из датчиков снабжен направляющими стойка ш 21 с накладками 22, в кото- pbEs; закреплен корпус 23 датчика положения. В качестве его может быть использован, напримерj ин.дккатор часового типа с присоединенным преце зионным потенциометром типа Г111ИЛ-20К или кодовым датчиком типа ПИК-15. ФЭП-15. Индикатор имеет двухсторонний шток 24. На одном его конл;е распола г ается контактирз,тощий наконечник 25 защемленный шарик или карбокорундовая вставка. Другой конехг, штока оснащен сердечником 26, которь(й входит в за- зор катушки 27 с магннтогшоводом 28 Катушка с магнитопроводом .я сердечником образуют электромаг нитный от672
волной привод, выводы 29 которого 1пгпс,оединяются к системе управления ;о5ототехническим комплексом. К ней же подсоединены датчики 18 и 19. Привод работает следующим обраПри 1- ахождэнии якоря 7 вне воз- ;;,уп;ного зазора 5 вал 9 неподвижен, |окальная подвижность робота также очч-утствует. робот совершает регио- ) (переносные) движения. При подходе к месту изменения ориентации детали или звена якорь 7 входит в воздушный зазор 5, образованный наконечниками 4, Включаются катушки 3, по маг.иитопроводу 2 проходит магнит- поток, -пересекающий якорь 7. Ще- точ-;по-коллекторный узел 8 обеспечи- LiacT токоподвод к якорю 7. Якорь ирап1,ае : ся до тех пор, пока датчик положенияэ установленный на ведомом звене, не вы,(Т;;;с г сигпа.т о дост -шении требуемого положения. Б этом случае ток в якоре отключают, робот готов для созер1яекия последующих манипу- л.яций. Якорь может быть выведен из зазора. При необходимости повторения ;1р - ентир пощих действий якорь 7 вновь .;ещаются Б зазор 5 посредством ;1ействия региональных степеней подвижности .
Перед нег:осредственнь1М помещением |-ч;)ря 7 с колпачком 6 в зазо.р 5 датчики 18 и 19 отводятся, катуш- кк 27 находятся во включенном состоянии, сердечник 26 притянут, шток 24 зтяиуч. .После позиционирования, т.е. :;о 1е;11ения якоря в зазор, катушки 27 от ключаются от сети. Под действием ;арул и.ны, имеющейся в корпусе 23 датчика (обычно спиральной), шток 24 двшкется вправо. Во втянуто.м положении сердечник 26 показан пунктиром (фиг, 2).
Шток, выдвигаясь, наконечником 25 упирается в фиксирующую поверхность 16 или 17, Затем происходит отсчет-показаний датчика. Эти показания сравниваются с заданными, в случае невязки система упранления, воздействуя на регион-алькые степени подвижности, устраняет рассогласование. Может быть организовано также программное управление по заданным координатам положение по которым определяется с помощью датчиков 18 и 19, После окончания позиционирования включаются катушки 27, щток
24 убирается, модуль привода отводится в нужную точку пространства. Далее цикл работы повторяется.
Форм
л а
изобретения- 5
Привод манипулятора, содерлаящий магнитную систему и токопроводящие элементы, связанные с источником электрической энергии, о т л и ч а- ю щ к и с я тем, что, с целью повышения надежности эа счет улу ппения
электродинамических характеристик, он снабжен двумя датчиками положения с приводами их перемещения, установленными внутри магнитной системы, и двумя опорными элементами с контактными поверхностями, расположен- ньп-1И взаимно перпендикулярно, при этом опорные элементы связаны с то- копроводящими элементами .с возможностью взаимодействия их контактных поверхностей с соответствующими датчиками положения.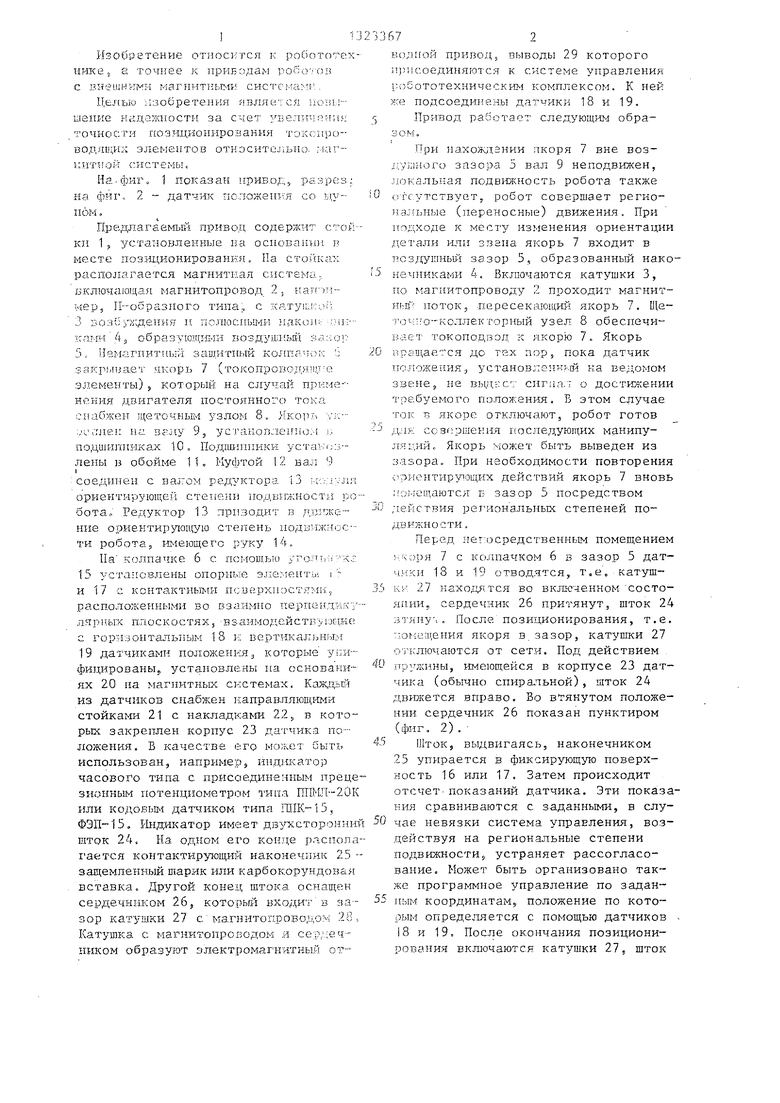
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод манипулятора | 1986 |
|
SU1397279A1 |
| Исполнительный орган робота | 2015 |
|
RU2653397C2 |
| Промышленный робот | 2015 |
|
RU2654096C2 |
| Промышленный робот | 1986 |
|
SU1404330A1 |
| Промышленный робот | 1990 |
|
SU1729740A1 |
| ПРОМЫШЛЕННЫЙ РОБОТ | 2003 |
|
RU2247020C1 |
| Промышленный робот | 1990 |
|
SU1805028A1 |
| Робот промышленный | 2014 |
|
RU2634392C2 |
| ПРИВОД СХВАТА МАНИПУЛЯТОРА | 2008 |
|
RU2378102C2 |
| Промышленный робот | 1990 |
|
SU1722810A1 |
Изобретение относится к робототехнике, а точнее к приводам роботов с внешними магнитными системами. Целью изобретения является повьше- ние надежности за счет увеличения точности позиционирования токопрово- дящих элементов относительно магнитной системы. Привод содержит магнитную систему, установленную в рабочей зоне манипулятора, включающую магнитопро- врд 2 и токопроводящие элементы (якорь) 7, установленные на подвижном органе манипулятора. При работе привода якорь 7 вводится в воздушный зазор 5 магнитной системы и через якорь пропускается электрический ток. Установка якоря контролируется датгш- ками положения 18 и 19. 2 ил. / .4 / 5 /,7 / 3 П 7ff а S (Л с 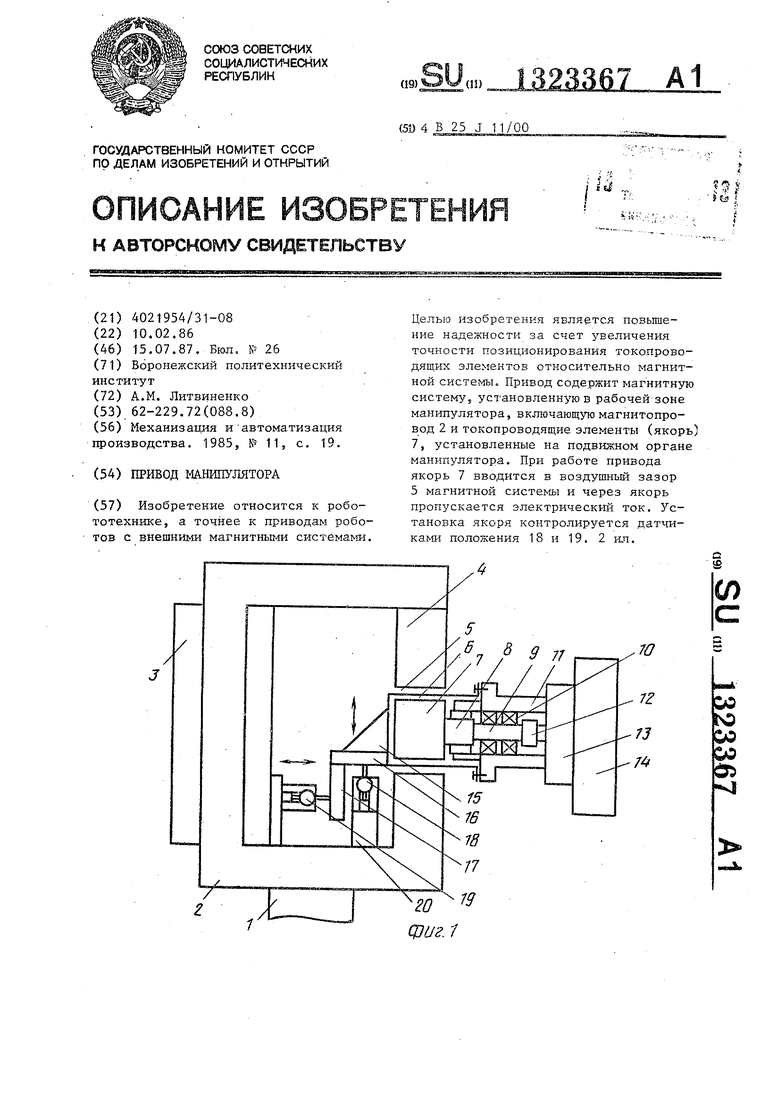
Редактор Л.Повхан
Составитель Ф.Майоров Техред А.Кравчук
Заказ 2914/19
Тираж 953Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Корректор И.Муска
| Механизация и автоматизация производства | |||
| Приспособление для установки двигателя в топках с получающими возвратно-поступательное перемещение колосниками | 1917 |
|
SU1985A1 |
| Способ изготовления электрических сопротивлений посредством осаждения слоя проводника на поверхности изолятора | 1921 |
|
SU19A1 |
