11
Изобретение OTIIOCI-ITCH к Mni- ii-Kv- cTpoeni-iio,, s частное: x poC- . /./i о-лс - ло1 нческим комплексам, и можег Oijirj использобано для автоматнзаци -; ир;:.-- изводственных процессоп .
iJ(b;i.i гиобретепия является: ji.-i.i-i ui ijine безоласности работы .а счет оОгспе ч:еи1Ц свободного доступа рг- Сочей .зоне,.
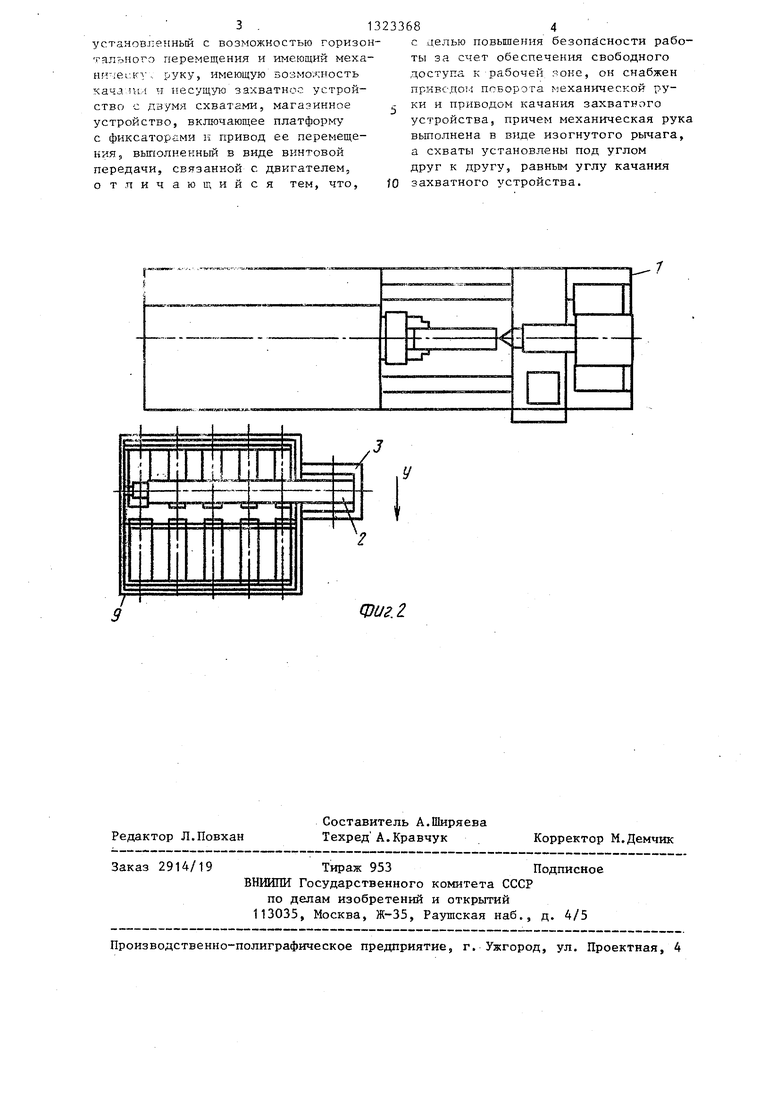
lid Ъпг, 1 изображен робото ге.х-иоло - j li fOC -a и комплекс;- s s il;nr, 2 - то лее., вв;; .
рпбстготехнологический к(г -иле ис; содер;кит станок 1, промышлен} ;:: ро-- бот 2, установленный на механизме3иОЗП |, перемещения :л 13:.К; : i ;к;||иш по Юротную колонну . с npiiiio.- : eL rinpciN-eiiTeiiUH 5 механическую г;:- Т :- у::тааопле -;пу п на пороротной кс.: ч-1: :-,:/
4с во;1ь;ожнос 1 ью качания в ьер чкаль |пй п. югчу .л: 1 ;I TI несу;и; 10 за:-; :;: ;- Г
уст зойс ггзо 6 с .циумя с: ;ват;г.1 и, . , раепо.поженньгми под уг .гюм t ,1:4/ ГУ, а так);;е пр;-шод их ) ;.-:- чем схпаты / и 8 расположены н;ч лом ч ЛРУ-t Другу и этот ут с.и ра.веи К41чан ;1я .ватио - с у-:: роист в а 6..
Механи ческая: рука : вгл - олкеиа з
}31ц.е изогнутого рычага, Ь :аоне .ггеи-- ствия схвато:з 7 и 8 -y(;Tano}:;jreiu:. магазинное устройст:во 9, la-ieionic--- гшатформу 10 с фиксаторам : 1 ч ;;/-:.- водом 12 ее т1еремещепв.Я; Еыис-.;ч :п Ч1.;.;. в злгде :зинто1:;ой нередачи,, связзчлоч с двигателем (не по:ка.зан) ч нес-у1ч-у:о ча.лету 13 с загото1 -кам:ч ,
Роботот: ехнологинес;аш ко;-- нлекс работает следующей образом..
Промышленном робот 2 -с подняты:-- вертикально изогнутым ры-чагом (ме- ханической руко.й 5) н опуп елньм вниз схватом 7 по программе с по - мощью мех 1низма гюз:шд:ионного переме.--- ш;ен:ия устанавливается в заданной точке, напримерJ на. позии,1-ио выбора за отовки 14, да.лее механическая рзпса 5 наклоняется н схзат 7 з;1хваты вает заготовку, Подъе:мом ме:ханичес- кой ру.ки 5 в вертикальное положетп- е и последьаоЕ им поворотом ее вокруг вер7 икат1ьной оси с по:моя5ыо привода переметения поворотной Koj:roH-:;bi i o6ec ie-t 4RaeTCH выбор заготсо::;и : из ячейк:и налеты 13 и беспре:аятгл зен М ш ..о.:.{ Вглсч упающих шстей стгчт п ; а MexaiHJsMOM по:;и1.п--;онного :ч:;. ч:о-- п(ен:-ш по горизонтал .ЬНий. коорди-иат-;-;.:.,
;
V
-j
п .;
0
682
:г:ро1-;ьш1ленпый робот 2 перемещается в загрузки - выгрузки, качание : анической руки 5 обеснечивает перемещение заготовки 14 в зону за- 1 р-у :-ки - зьггрузки. после чего кача- :чеха 1гческой руки 5 с зажатой I:-; ; ::}5ате 7 заготовкой обеспечивает ;. ;-:- :ч;овку ее в патрон станка 1, вы-- в;:..1 разжатого схвата 7 из зоны за- rpvsKH. Затем подается команда на ркч очение станка 1, Во время работы .. 1 П15ом1)тшленный робот 2 захва- Tbi.jaeT схва-гоы 7 следующую заготовку 1 ;, после чего с помощью приводов ка-,ания механической руки 5 и за- кячтного устройства б схват 7 подни- -:-, ся 5 а схват 8, благодаря одина- - :;1зому углу качания и углу ci рас- 1иг1ожения схватов 7 и 8, оказывается .|;г отовленным- к снятию обработан- 4of заготовки из патрона станка.
После перемещения промышленного робота 2 йа позицию разгрузки патро- :ia станка 1 н.з.клоном механической руки 5 схват 8 захватывает обрабо- .1;:ую заготовку 14 и перемещением 1.-сч аническэй руки 5 извлекает ее патр-она станка. .Затем, меняя гчкааты 7 и 8 местам:;- и перемещая ме-- ):...- чесхую ру.ку 5, в натрон станка ус :i :п1аБ. новую заготовку 14. 1ч:;ле установки заготовки 14 механи- -: .;--ц-а.я рука .5 поднк-тется, поворачи- .,оется посредством привода перемеще- )Я поворотной колонны и перемещает- с:т: ча координату, обеспечивающую :ч-1хчат следующей заготовки 14. Накло- ч-м механической руки 5 схват 7 за- :.. атывает загс товку, затем механическая рука 5 ноднимается, а схват 8 опускается и наклоном механической руки 5 укладывает обработанную заготовку 14 в ячейку налеты 13.
После укладки обработанной детали и подъема механической руки 5 промышленный робот готов к последую- циклу выгрузки - загрузки. С .пью сохранения положения оси заготовок по высоте при загрузке палеты 13 с заготовка1 1И по программе вьща- ется команда приводу 12 перемещения п.1атформы 10, который через винтовую пару устанавливает.- платформу с фиксаторами И для палеты 13 на за- д;гнну10 высоту,
Ф о р м у л а изобретения
Робототехн.ологический комплекс, Содержащий станок, промышленной робот.
установленньй с возможностью горизонтального перемещения и имеющий меха- HH-iei -Ky руку, имеющую возможность кача и несущую захватное устройство с двумя схватами, магазинное устройство, включающее платформу с фиксаторами к привод ее перемещения э выполненный в виде винтовой передачи, связанной с двигателем, отличающийся тем, что.
с целью повышения безопасности работы за счет обеспечения свободного доступа к рабочей яоке, он снабжен привс-до1-5 поворота механичес :ой руки и приводом качания захватного
устройства, причем механическая рука выполнена в виде изогнутого рычага, а схваты установлены под углом друг к другу, равным углу качания
захватного устройства.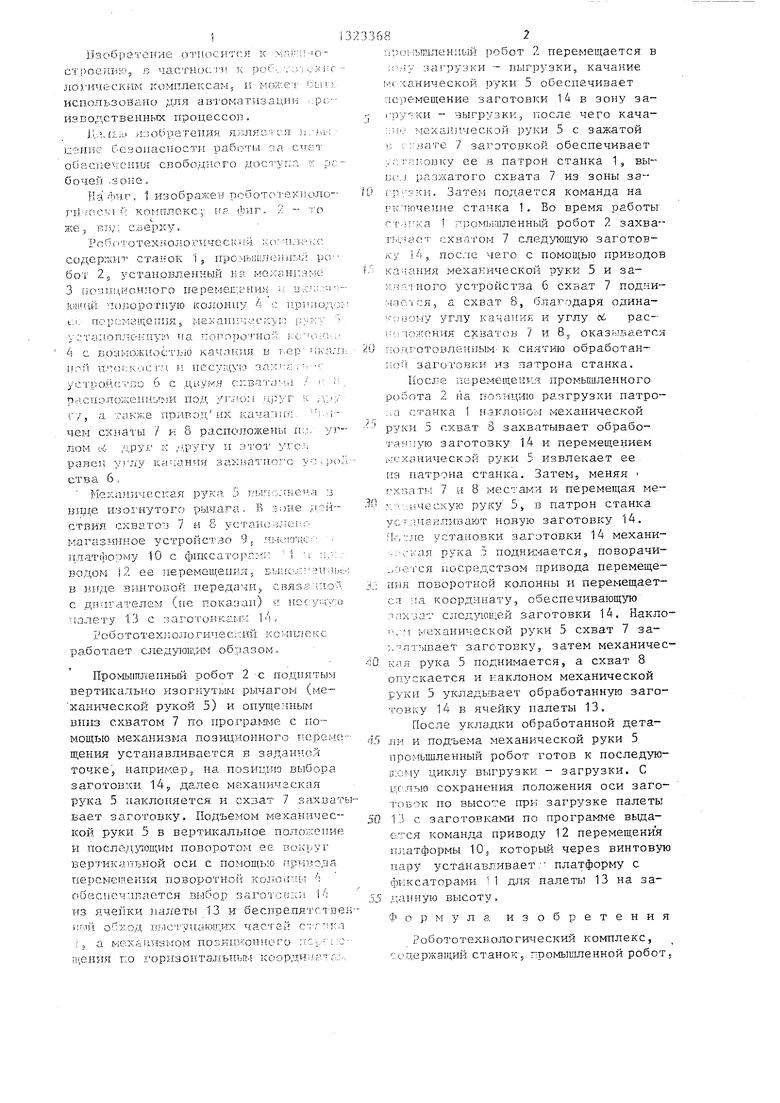
| название | год | авторы | номер документа |
|---|---|---|---|
| Гибкий производственный модуль холодной листовой штамповки | 1986 |
|
SU1535665A1 |
| Промышленный робот | 1990 |
|
SU1756142A1 |
| Магазинное устройство | 1986 |
|
SU1424919A1 |
| Промышленный робот | 1986 |
|
SU1348166A1 |
| Гибкая производственная система | 1986 |
|
SU1373535A1 |
| Манипулятор | 1986 |
|
SU1321581A1 |
| Автооператор | 1979 |
|
SU856749A1 |
| Промышленный робот | 1977 |
|
SU846267A1 |
| Промышленный робот модульного типа | 1983 |
|
SU1158344A1 |
| Робот к листоштамповочному прессу | 1976 |
|
SU565818A1 |
Изобретение относится к машиностроению и может быть использовано при автоматизации технологических процессов. Целью изобретения является повьшение безопасности работы за счет обеспечения свободного доступа к рабочей зоне. Для этого промьшлен- ный робот 2 имеет привод перемещения поворотной колонны, а механическая рука вьшолнена в в1-ще изогнутого рычага, несущего схваты 7 и 8, установленные под углом oi друг к другу, равным углу качания захватного уст- роства 6. При подъеме механической руки 5 в вертикальное положение и последующем повороте ее вокруг вертикальной оси с помощью привода перемещения поворотной колонны 4 обеспечивается выбор заготовки 14 из ячейки палеты 13 и беспрепятственный обход выступающих частей станка 1. 2 ил. с: « 7 в / F Cpt/2.f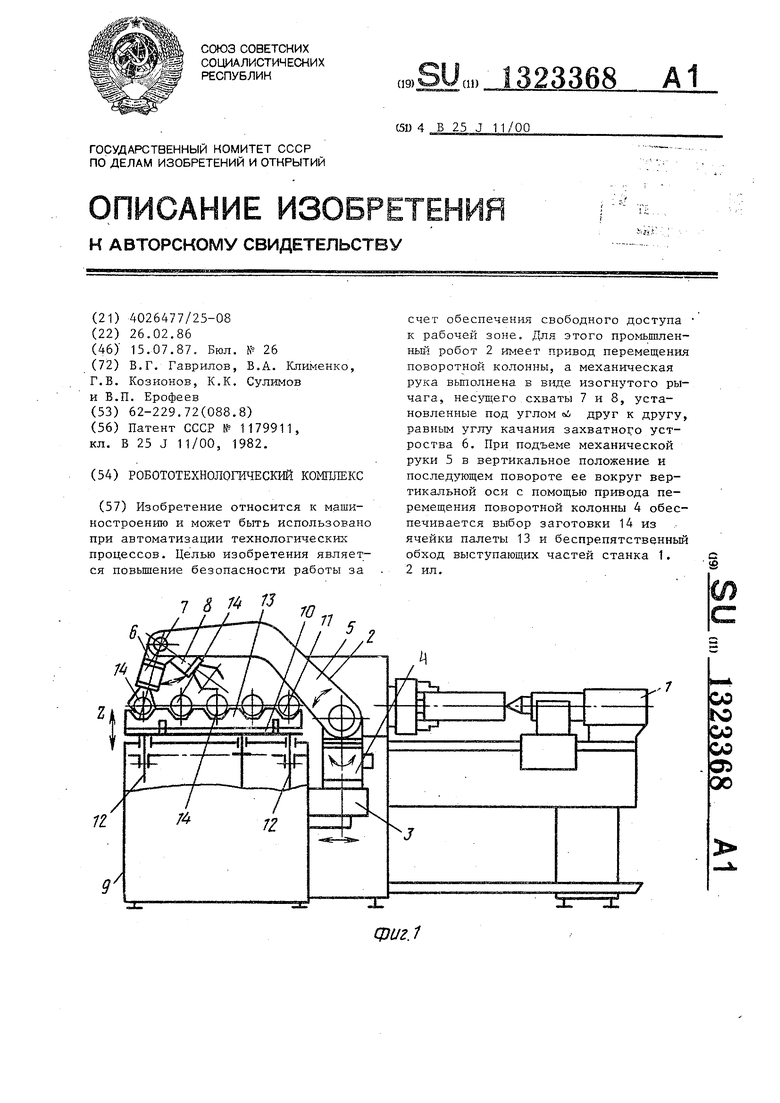
Ш
Редактор Л.Повхан
Составитель А.Ширяева Техред А.Кравчук
Заказ 2914/19
Тираж 953Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Ф
Корректор М.Демчик
| Патент СССР № 1179911, кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
