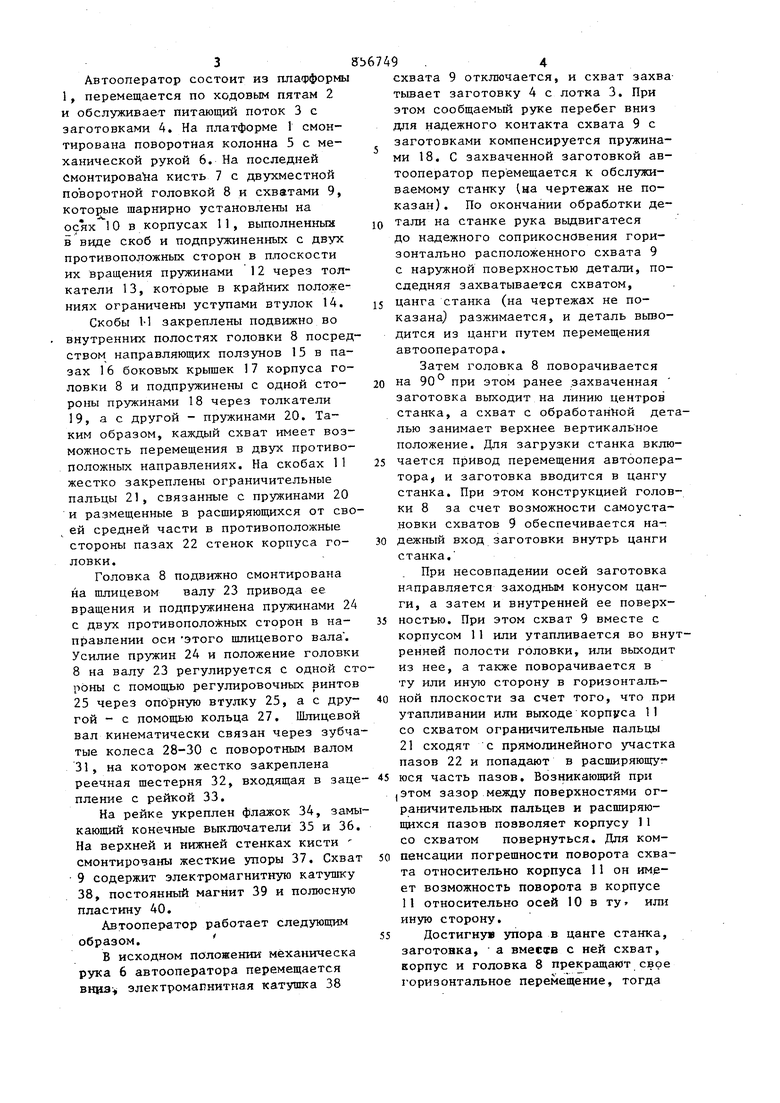
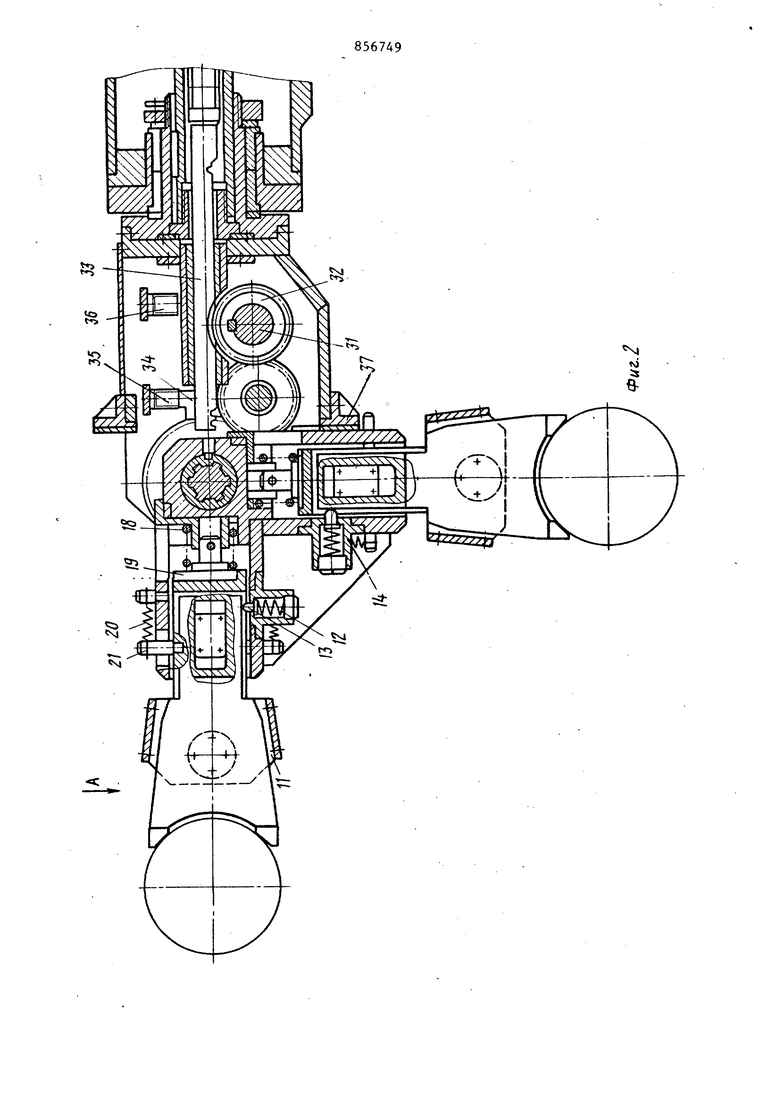
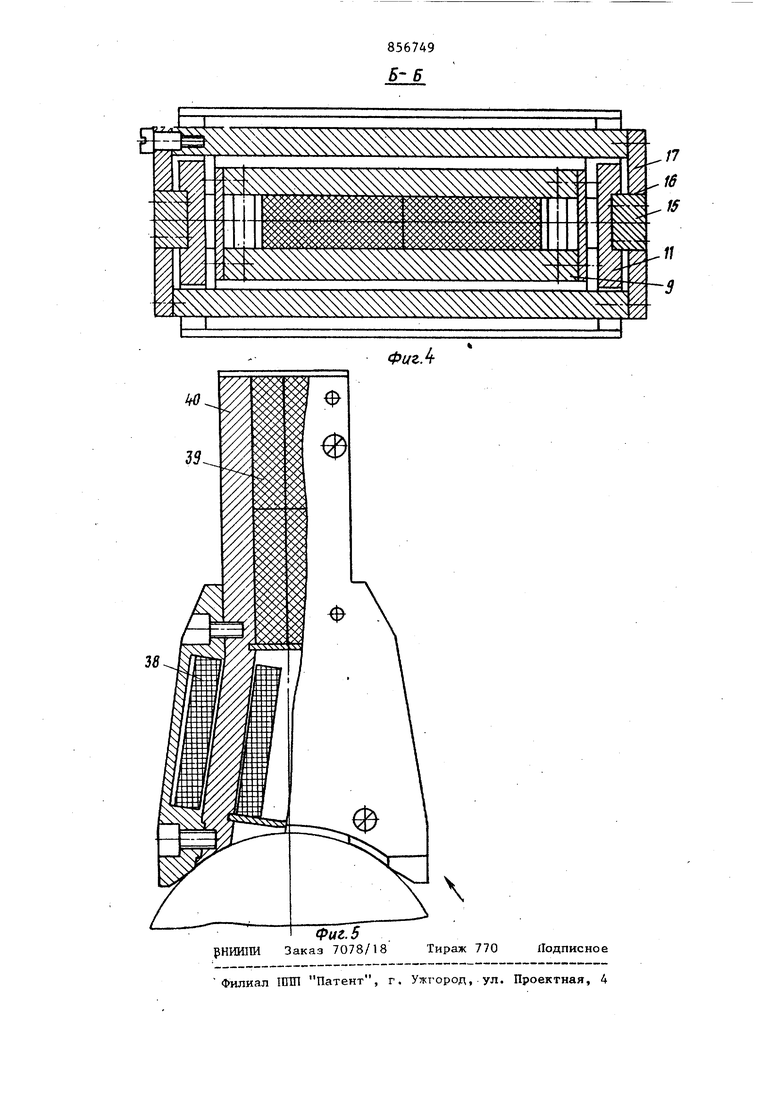
Изобретение относится к MaimiHOстроению и может быть использовано при автоматизации технологических процессов. Известен автооператор, содержащий платформу, поворотную колонну и механическую руку, несущую кисть с двухместной поворотной головкой, имеющей корпус и схваты и установленной на выходном валу привода ее поворота рЗ. Недостатком такого устройства явля.тся то, что схваты установлены на поворотной головке жестко, а это требует высокой точности позиц онирования схвата механической руки что при усложнении конструкции и си темы управления существенно снижае как функциональные возможности уст ства, так и его надежность. Цель изобретения - расширение функциональных возможностей и повышение надежности. Эга цель достигается тем, что автооператор снабжен дополнительны- ми корпусами, вьтолненными в виде скоб, в каждой из которых шарнирно смонтирован охват, подпружиненный в плоскости его вращения, а скобы установлены с возможностью осевого перемещения в корпусе поворотной головки под углом 90 друг относительно друга и подпружинены, причем головка установлена на выходном валу привода с возможностью перемещения вдоль его продольной оси и также подпружинена. При этом схваты выполнены из магнитного материала и снабжены электромагнитными катушка 1и. На фиг. 1 схематично изображен предлагаемый автооператор, общий вид; на фиг. 2 - то же, разрез; на фиг. 3 вид А на фйг. 2; на фиг. 4 - разрез Б-Б на фиг. 3; на фиг. 5 - схват, общий вид.
Автооператор состоит из плафформы 1, перемещается по ходовым пятам 2 и обслуживает питающий поток 3 с заготовками 4. На платформе 1 смонтирована поворотная колонна 5 с механической рукой 6. На последней смонтировала кисть 7 с двухместной поворотной головкой 8 и схватами 9, которые шарнирно установлены на осях 10 в корпусах 11, выполненных i виде скоб и подпружиненных с двух противоположных сторон в плоскости их вращения пружинами 12 через толкатели 13, которые в крайних положениях ограничены уступами втулок 14. Скобы М закреплены подвижно во внутренних полостях головки 8 посредством направляющих ползунов 15 в пазах 16 боковых крышек 7 корпуса головки В и подпружинены с одной стороны пружинами 18 через толкатели 19, ас другой - пружинами 20, Таким образом, каждый схват имеет возможность перемещения в двух противоположных направлениях. На скобах 11 жестко закреплены ограничительные пальцы 21, связанные с пружинами 20 и размещенные в расширяющихся от своей средней части в противоположные стороны пазах 22 стенок корпуса головки.
Головка 8 подвижно смонтирована на шлицевом валу 23 привода ее вращения и подпружинена пружинами 24 с двух противоположных сторон в направлении оси ЭТОГО шлицевого вала . Усилие пружин 24 и положение головки 8 на валу 23 регулируется с одной строны с помощью регулировочных винтов 25 через опорную втулку 25, а с другой - с помощью кольца 27, Шлицевой вал кинематически связан через зубчатые колеса 28-30 с поворотньм валом 31, на котором жестко закреплена реечная шестерня 32, входящая в зацепление с рейкой 33,
На рейке укреплен флажок 34, замыкающий конечные выключатели 35 и 36. На верхней и нижней стенках кисти смонтированы жесткие упоры 37. Схват 9 содержит электромагнитную катушку 38, постоянный магнит 39 и полюсную пластину 40,
Автооператор работает следуюштцм образом,
В исходном положении мёханическа рука 6 автооператора перемещается вниз электромагнитная катушка 38
схвата 9 отключается, и схват захва тьшает заготовку 4 с лотка 3, При этом сообщаемый руке перебег вниз для надежного контакта схвата 9 с заготовками компенсируется пружинами 18. С захваченной заготовкой автооператор перемещается к обслуживаемому станку (иа чертежах не показан) . По окончании обработки детали на станке рука вьщвигатеся до надежного соприкосновения горизонтально расположенного схвата 9 с наружной поверхностью детали, посдедняя захватываемся схватом,
цанга станка (на чертежах не показана} разжимается, и деталь вьгоодится из цанги путем перемещения автооператора,
Затем головка 8 поворачивается
на 90° при этом ранее захваченная заготовка выходит на линию центров станка, а схват с обработанной деталью занимает верхнее вертикальное положение. Для загрузки станка включается привод перемещения автооператора и заготовка вводится в цангу станка. При этом конструкцией головки 8 за счет возможности самоустановки схватов 9 обеспечивается надежный вход заготовки внутрь цанги станка,
При несовпадении осей заготовка направляется заходным конусом цанги, а затем и внутренней ее поверхностью. При этом схват 9 вместе с корпусом 11 или утапливается во внутренней полости головки, или выходит из нее, а также поворачивается в ту или иную сторону в горизонтальной плоскости за счет того, что при утапливании или выходе корпуса 11 со схватом ограничительные пальцы 21 сходят с прямолинейного участка пазов 22 и попадают в расщиряющуг
юся часть пазов. Возникающий при |Этом зазор между поверхностями ограничительных пальцев и расширяющихся пазов позволяет корпусу 11 со схватом повернуться. Для компенсации погрешности поворота схвата относительно корпуса 11 он имеет возможность поворота в корпусе 11 относительно осей 10 в ту или иную сторону,
Достигнув упора в цанге статна, заготовка, а вместе с ней схват, корпус и головка 8 прекращают свое горизонтальное перемещение, тогда
как автооператор еще продолжает перемещаться, сжимая одну из пружин 2, Величина перебега автооператора позволяет осуществить надежное бази зование заготовки по жесткому упору цанги.
Загрузив первый станок, автооператор перемещается к следующему, по пути втягивает механическую РУку и поворачивает ее кисть 7 на 180 . Цикл разгрузки и загрузки последующих станков аналогичен.
Таким образом, предлагаемый автооператор обеспечивает полую автоматизацию загрузки и разгрузки станков, расположенньк вдоль пути его перемещения .
Формула изобретения
1. Автооператор, содержащий платформу, поворотную колонну и механическую руку, несу1иую кисть с двухместной поворотной головкой, имеющей корпус и схваты и установленной на
выходном валу привода ее поворота, о тлйч ающийся тем, что, с целью расширения функциональных возможностей и повьшения надежности, он снабжен дополнительными корпусами, выполненными в виде скоб, в каждой из которых шарнирно смонтирован схват, подпружиненный в плоскости его вращения, а скобы установлены с возможностью осевого перемещения в корпусе головки под углом 90 ° друг относительно друга н подпружинены, причем головка установлена на выходном валу привода
с возможностью перемещения вдоль его продольной оси и также подпружинена .
2. Автооператор по п. 1, о, т личающийся тем, что схваты выполнены из магнитного материала и снабжены электромагнитными катушками.
Источники информации, принятыеВО внимание при экспертизе
1, Авторское свидетельство СССР № 510363, кл. В 25 J 11/00, 1974.

| название | год | авторы | номер документа |
|---|---|---|---|
| АВТООПЕРАТОР | 1973 |
|
SU368007A1 |
| Автооператор | 1984 |
|
SU1191256A1 |
| АВТООПЕРАТОР | 1972 |
|
SU344960A1 |
| Схват промышленного робота | 1986 |
|
SU1313706A1 |
| Роторный станок для шлифования отверстий деталей | 1989 |
|
SU1660940A1 |
| Автооператор | 1981 |
|
SU971613A1 |
| Цанговый патрон | 1984 |
|
SU1171224A1 |
| Устройство для автоматической смены инструмента | 1983 |
|
SU1135593A1 |
| Автоматизированная линия для многопереходной штамповки | 1986 |
|
SU1344471A1 |
| Автооператор для смены инструментальных наладок | 1986 |
|
SU1426744A1 |
3 8
/
/
