13233742
Изобретение относится к машино- разом. При нажатии штыря 5 на жесткую строению, в частности к захватным поверхность он перемещается вверх, устройствам промышленных роботов. т,е. как бы утапливается в карман 4,
Цель изобретения - повышение ка- сжимая витую пружину 6, и при этом дежности работы путем полдерживания вследствие шарнирного соединения пос- детали в процессе ее транспортире- редством оси 7 тянет за собой профили- вания,рованный рычаг 8 по траектории, котоНа фиг.1 изображено захватное уст- рая задана для центрирующих 10 и под- ройство, общий вид; На фиг.2 - сече- держивающих 9 площадок симметричными ние А-А на фиг.1; на фиг.З - сечение (О криволинейными нагфавляющими пазами Б-Б на фиг.1,12, по которым скользит палец 13, заЗахватное устройство состоит из прессованный в профилированный ры- соединительной пластины 1, жестко чаг 8. крепящей корпус захватного устройства 2 с промьш ленным роботом (не по- (5 После команды на транспортировку казан), вакуумного или электромагнит- листовой заготовки 11 вакуумный или кого захватного органа 3. В фрезеро- магйитный орган 3 (в зависимости от ванных карманах 4 по перг1метру уст- свойств материала заготовки) отрыва- ройства находятся механизмы удержания ет и отводит ее от жесткой поверхно- и центровки. Эти механизмы состоят из 20 Одновременно с отводом под дей- приводного штыря 5, установленного ствием витой пружины 6 приводные шты- в кармане корпуса по скользящей по- Р 5 посредством профилированных ры- садке и подпружиненного витой пружи- чагов В, двигающш:ся по направляющим ной 6 сжатия, к которому шарнирно на копирным пазам 12„ выдвигают центри- оси 7 присоединен профилированный, ры- 25 рующие 10 и поддерживающие 9 площад- чаг 8 с поддерживающими 9 и центриру- ки, вступающие в контакт с листовой ющими 10 площадками для конкретной заготовкой 11, вначале центрируя ее. листовой заготовки 11. Траектория площадкой 10, а затем поддерживая на движения и ход профилированного рыча- протяжении транспортировки площад- га с упорами задаются криволинейньми зо 9. симметрично фрезерованными в карманах
корпуса направляющими копирными паза- Формула изобретения ми 12,, в которых по скользящей посадке находится палец 13,, запрессованный Захватное устройство, содержащее в профилированный рычаг.. корпус с упор.ами и захватным органом,
Захватное устройство работает еле- отличающееся тем, что, с дующим образом.целью повышения нa I;eжнocти работы,
Для захвата неориентированной оно снабжено по числу упоров подпру- строго относительно осей устройства хсиненными штырями, каждый упор вьтол- листовой заготовки 1 1, находящейся на 40 виде профилированного подвижно- жесткой поверхности (не показано), го рычага, на котором закреплен па- подводится захватное устройство. Пер- лец, в корпусе выполнен копирный паз, выми касаются жесткой поверхности в котором размещен палец, причем на штыри 5, которые убир,ают в карманы 4 одном конце профилированного рычага корпуса 2 профилированные рычаги 8 с 45 выполнены поддерживающая и центриру- поддержйвающими 9 и центрирующими 10 ющая площадки, а другой конец рычага площадками в исходное положение (по- соединен посредством шарнира с под- казано пунктиром) до момента касания пружиненнььм штырем, размещенным в захватного органа 3 листовой заготов- корпусе параллельно оси захватного ки 11. Это происходит следующим об- 50 устройства.
А /
6-6
фиг. 2
г I I
73 4 5
фи.З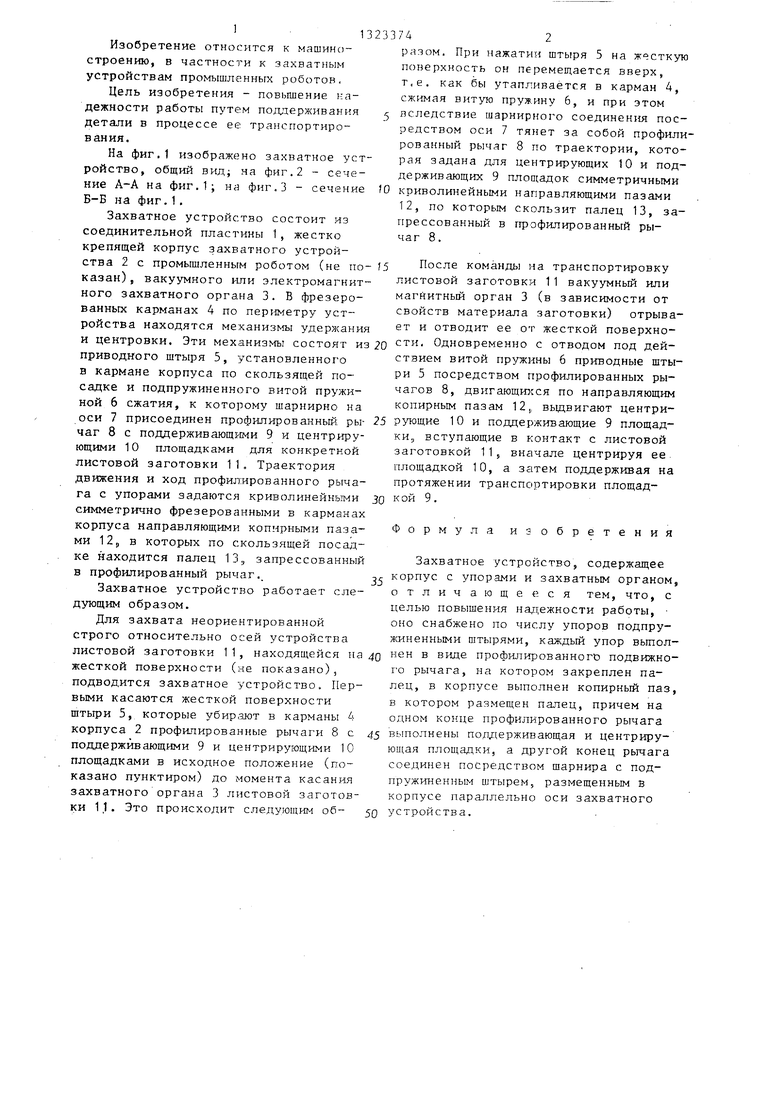
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая сборочная линия | 1985 |
|
SU1296350A1 |
| Захватная головка манипулятора | 1986 |
|
SU1342727A1 |
| Загрузочное устройство | 1977 |
|
SU677871A2 |
| Захватное устройство для грузов со штырем и фигурной головкой | 1986 |
|
SU1525110A1 |
| Механическая рука к прессу | 1988 |
|
SU1611755A1 |
| Устройство для формования изделий "мюзле | 1977 |
|
SU751485A1 |
| Устройство для кодовой маркировки радиодеталей | 1984 |
|
SU1226549A1 |
| Захват | 1986 |
|
SU1397280A1 |
| Устройство для подачи штучных заготовок в рабочую зону пресса | 1989 |
|
SU1706764A1 |
| Автоматический захват | 1983 |
|
SU1174366A1 |
Изобретение относится к машиностроению, в частности к захватным устройствам промышленных роботов. Целью изобретения является повьш1ение надежности работы путем поддерживания детали в процессе ее транспортирования. Для захвата листовой заготовки. находящейся на жесткой поверхности, подводится устройство и первыми касаются жесткой поверхности штыри 5, которые убирают в карманы 4 корпуса 2 профилированные рычаги 8 с поддерживающими 9 и центр тощими 10 площадками в исходное положение до момента касания захватного органа листовой заготовки 11. После команды на транспортировку листовой заготовки 11 захватный орган 3 отрывает и отводит ее от жесткой поверхности и одновременно с отводом под действием пружины 6 штыри 5 посредством профилированных рычагов 8, двигающихся по копир- ным пазам 12, захватывают заготрвку 11, центрируя ее площадками 10 и поддерживая площадками 9. 3 шт. о (Л :о : vj 
Редактор И.Касарда
Составитель А.Алексеев
Техред Л.Олийнык Корректор А. Зимокосов
Заказ 2915/20Тираж 953Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Схват промышленного робота для перемещения заготовок | 1982 |
|
SU1013266A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
