Фиг. 7
теина с втулкой поворотного корпуса. Срабатывает датчик, включающий электромагнитный захватный орган, который открывает отштампованную деталь 3 от матрицы. Во время леремеи ения ползуне вниз втулка снимает пружину 9. Ролик, воздейст вуя на копирный паз, поворачивает механическую руку, выводя ее мз зоны Действия штампа 2, Затем ролик перемещается по вертикальному участку копирного паза. Во
время вертикального перемещения механической руки опорный ролик вступает во взаимодействие с упорной площадкой 5 опорной плиты, в результате зго пропсхо дит горизонтальное перэмеи-ение раГ;Очей площадки 17. Затем срабатывает дiJ7чик, обесточивается катушка 16 электромагнитного захватного органа и деталь накидыва- ется на штырь 24 загрузочного устройства. 7 ил,
| название | год | авторы | номер документа |
|---|---|---|---|
| Робот к штамповочному прессу | 1982 |
|
SU1127674A1 |
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
| Устройство для подачи штучных заготовок в рабочую зону пресса | 1989 |
|
SU1706764A1 |
| Устройство для штабелирования деталей с отверстиями | 1986 |
|
SU1459780A2 |
| Промышленный робот | 1988 |
|
SU1604496A2 |
| Устройство к прессу для транспортирования штампованных деталей | 1989 |
|
SU1632586A1 |
| Автоматизированный комплекс для штамповки деталей | 1987 |
|
SU1581436A1 |
| Устройство для подачи штучных заготовок в рабочую зону штампа | 1980 |
|
SU912353A1 |
| МЕХАНИЗМ ШАГОВОЙ ПОДАЧИ ЛИСТОВЫХ ЗАГОТОВОК В РАБОЧУЮ ЗОНУ ПРЕССА | 1991 |
|
RU2011539C1 |
| Поточная линия для штамповки крупногабаритных листовых заготовок | 1991 |
|
SU1834813A3 |
Изобретение относится к механизации процессов холодной обработки металлов давлением и может быть использовано для загрузки пресса в автоматическом режиме. Цель изобретения - расширение технологических возможностей. Во время включения в работу пресса на автоматический режим ползун 1 начинает опускаться вниз до соприкосновения бонки 22 упорного кронштейна с втулкой поворотного корпуса. Срабатывает датчик, включающий электромагнитный захватный орган, который отрывает отштампованную деталь 3 от матрицы. Во время перемещения ползуна вниз втулка снимает пружину 9. Ролик, воздействуя на копирный паз, поворачивает механическую руку, выводя ее из зоны действия штампа 2. Затем ролик перемещается по вертикальному участку копирного паза. Во время вертикального перемещения механической руки опорный ролик вступает во взаимодействие с упорной площадкой 5 опорной плиты, в результате чего происходит горизонтальное перемещение рабочей площадки 17. Затем срабатывает датчик, обесточивается катушка 16 электромагнитного захватного органа и деталь накидывается на штырь 24 загрузочного устройства. 7 ил.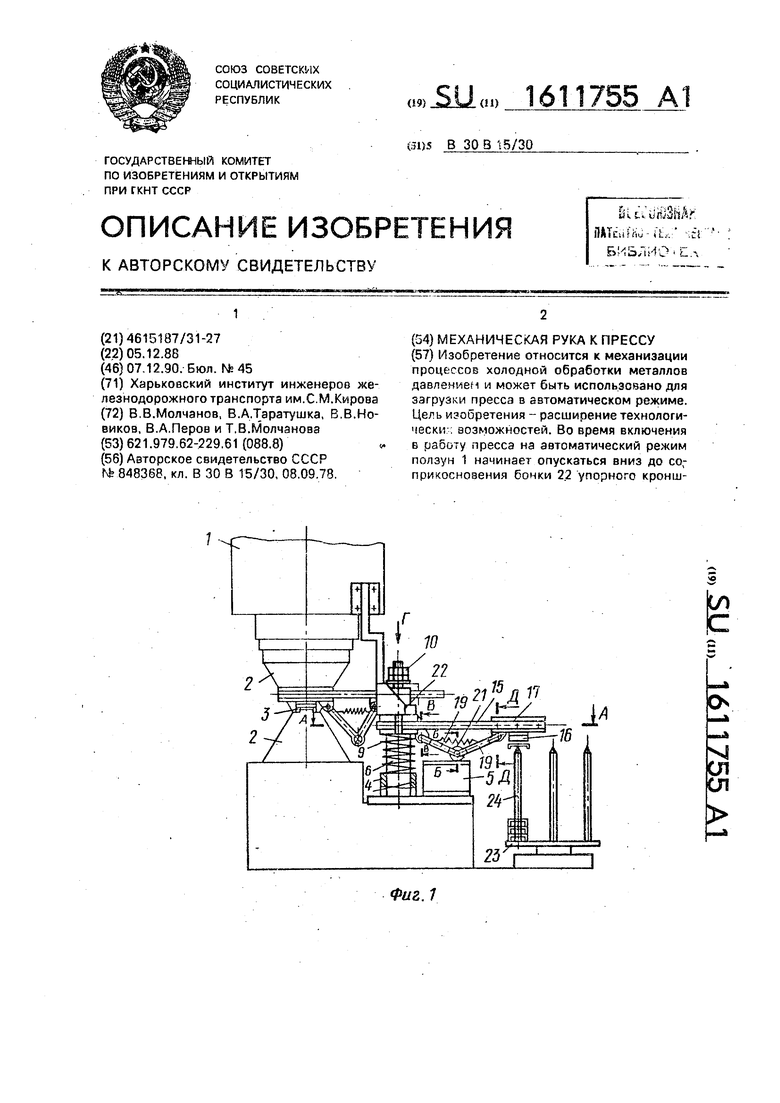
Изобретение относится к механизации
процессов холодной обработки металлов
давлением и может быть использовано для
разгрузки пресса в звтомгэтическом режи.ме..
Цель изобретения - расширение технологических возможностей,
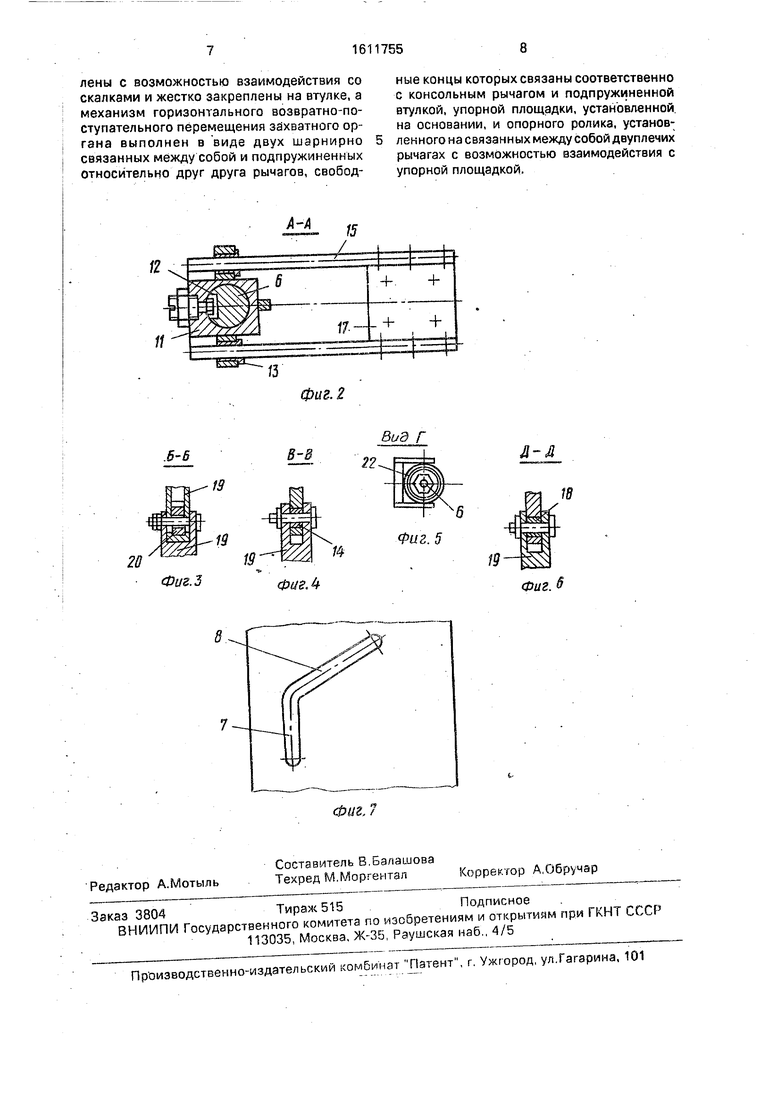
На фиг.1 представлена механическая рука при разгрузке, общий вид; на фиг,2 - разрез А-А на фиг, 1; на фиг,3 - разрез Б-Б на фиг.1; на фиг,4 - разрез В-В на фиг.1;на фиг,5 - вид Г на фиг, 1; на фиг.б - разрез Д-Д на фиг,1; на фиг,7 - развертка цилиндрической поверхности вала в месте расположе- ния фигурного паза.
Механическая рука к прессу содержит корпус, поворотный кронштейн, консольный рычаг, р еханизм выдвижения, упорный кронштейн и загрузочное устройство,
Устройства механической руки руются на гидропрессе, подвижной частью которого является ползун 1, а на его столе установлен штамп 2 для изготовления из ферромагнитной стали деталей 3 с цент- ральным отверстием,
В состав сварного корпуса входит опорная плита, прикрепленная болтами к столу гидропресса, к которой приварены бойка с отверстием 4 и упорная площадка 5. В отверстие 4 вертикально запрессован вал 6 с винтовым фигурным пазом на его цилиндрической поверхности и резьбовой на его торце. Фип/рный паз имеет вертикалы ый 7 и винтовой 8 участки, при этом вал 6 является направляюидей для пружины 9 сжатия, а резьба его торца используется для закреп- ления ггек 10. Поворотный кронштейн содержит втулку 11 с центральным отверстием, в которой выполнено резьбовое отверстие и приварены ребро и уши с отверстиями. Боковое резьбовое отверстие втул,Ч1. 11 используется для установки и фи:с сации гзйкой резьбового пальца, на торце
которого закреплен с возможностью поворота ролик 12.
Поверхность ценгралы;ого отверстия втулкм 11 поворотного кррнштейна охв аты- вает цилиндрическую поверхность вала 6, а сама втулка расположена между пружиной. 9 сжатия и гай(ами 10, при этом ролик 12 размеш,ен в фигурном пазу вала, В отверстиях обоих ушей втулки 11 запрессованы латурные втулки 13, а в отверстие ребра - втулка 14.
Консольный рычаг содержит две скалки 15, катушку 16 злектромагнита и механиз.м выдвижения. Скалки 15, которые винтами соединены с рабочей плош.адкой 17, используются в качестве нагфавляющих и размещены консольно в отверстиях втулок 13 прворотного корпуСсЗ. На рабочей площадке 17 выполнены сквозные отверстия для закрепления болтами катушки 16 электромагнита и приварено на е-о краю ребро, в отверстии которого запрессована втулка 18,
Механизм выдвижения состоит из двух шарнирно закрепленных звеньев 19,концы которых закреплены осями с возможностью поворота в отверстиях втулок 14 и 18, npi/f этом общая ось звеньев 19 используется для установки ролика 20, а на оба звена воздействует усилие пружины 21 растяжения. Упорный кронштейн, который изготовлен сварным, содержит горизонтально расположенную и закрепленную винтами на ползуне 1 гидропресса планки с бонкой 22, диаметр отверстия которой соответствует наружному диаметру втулки 11 поворотного cpoнuJтeйнa и расположенному соосио с вертикальной осью вала 6,
Загрузочное устройство, разиеш,енное на некотором удале1-1 /;и от фундамента гидропресса, содержит планшайбу 23 с вертикально установленным / по ее периферим штырями 24 с ко1- ическир.и торцами, наружный диаметр которых несколько меньше диаметра центрального отверстия отштампованной детали 3,
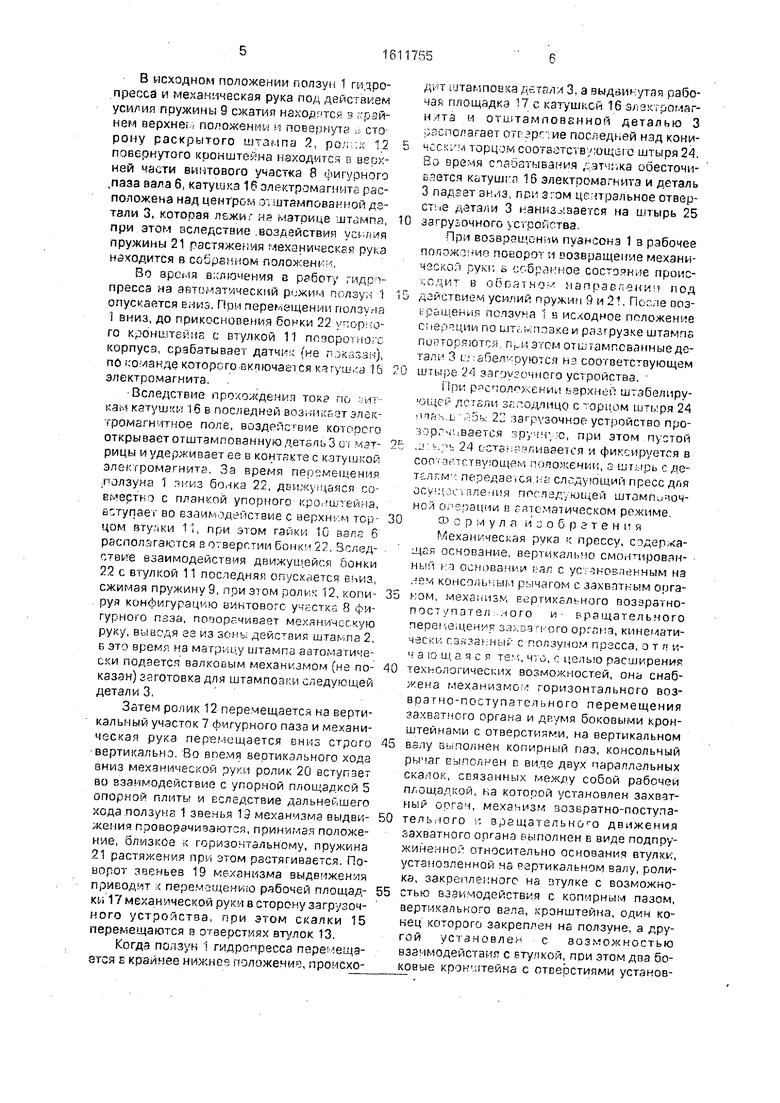
В исходном положении ползун 1 гидро- , пресса и механ11.неская рука под действием пружины 9 сжатия находгп-ся з . р.- й- нем верхнего положенмы и повернута .. сторону раскрытого штампа 2, рол;;;г 12 5 повернутого кронштейна находится в веихней части BHiiTOBoro участка 8 фигурного .паза вала б, катушка 16 электромагнита расположена над центром отштампованной дэ- тали 3, которая лежи- на матрице щтсзмпа 10 при этом вследствие .воздействия УСИЛИЯ пружины 21 растяжения механическая рука находится в соерг„м,но,м положенкм,
Во время включения в работу гидоппресса на автомат /зческмй рижим ползун
1
-- ь... ч . . 1 JJ 1 -1 1 i V J I о Y il (
опускается вниз. При перемещении ползуго 1 вниз, до прикосновения бонки 22 упор .-о- го кронштейна с етулкой 11 nnnopo-n-ioVo корпуса, срабатывает датчи:; (не показан), по ;оманде которсго.вкпючается кагуш/а 16 О электромагнита, .
Вследствие прохождения ток по -и-гг- ;ам катушгси 16 в последней вознм1СЕат электромагнитное поле, воздействие котоосго
открывает отштампованную деталь 3 о 2. рицы и удерживает ее в контакте с катушГой электромагнита. За время пео-мещения ;палзуна 1 зкиз бонка 22, движупдаяся совместно с планкой упорного крог-шгейна, вступает во взаимодействие с верхним тор- 30 чем втулки 11, при этом гайки 10 валя 6 располагаются в отверстии бойки 22, Вслед- , стви б взаимодействия движущейся бон ки 22 с втулкой 11 последняя опускается вьиз сжимая пружину 9, при этом 12, копи- 35 руя конфигурацию винтового участка 8 фигурного паза, поворачивает механическую руку, выводя ее из зоны действия штампа 2, в это время на матрицу ситампа автоматически подается валковым механизмом (не по- 40 казан) загото-вка для штамповки следующей детали 3,
Затем ролик 12 перемещается на верти- кальный участок 7 фигурного паза и механическая рука перемещается вниз строго 45 вертикально. Во время вертикального хода вниз механической руки ролик 20 вступзет во взаимодействие с упорной площадкой 5 опорной плиты и вследствие дальнейшего хода .ползуна 1 звенья 19 механизма выдви- 50 жения проворачиваются, принимая положе- ние, близкие к горизонтальному, пружина 1 растяжения при этом растягивается. Поворот звеньев 19 механизма выдвижения риводит ; пере.мэщению рабочей площад- 55 ii 17 механической руки в сторону загрузоч- ого устройства, при этом скалки 15 еремещаются в отаерстмях втулок 13.
Когда ползун 1 гидропресса перемещатся Е крайнее нижнее г оложение, происхоскпл ны те за ж ус ка ст ве не го вз ко
510
О
. 0 5
дим штамповка детали 3, а выдвинутая рабочая площадка 17 с кагушксн 16 злэктромаг- H.tTa и отштампованной деталью 3 располагает отг:эрг-:ие последней над коки- чссги-м торцо.м соотаатсгву;ощего штыря 2А. Во время спайатываиия ,;атчг,ка обесточи- Еэется кйтушгп 16 электромагнита и деталь 3 падгет вниз, пои згом це:п-ральное отверстие детали 3 наниз .вается на штырь 25 загрузочного устройства.
При возвращении пуансона 1 з рабочее положа:Н1П поворот и возвращение механи- чзскоп рукц Б собранное состояние проис- в оосатно и напраегенип под дэйствием усилий пружин 9 и 2. Пог.ле ооз- ьращения ползуна 1 в исходное положение спер-тции по шт.ыпозке и разгрузке штампа повторяются, этом отштампсванныеде- тали 3 ш табелируются на соответствующем штыре 24 загрузочного устройства.
При расположении кзрхней штабелирующей детгли заподлицо с торцом штыря 2А тйь.ь ;:5i,: 23 загрузочное устройство про- зоргчивается зруч г,;о, при этом пустой .: ь,; ь 24 оств яэливается и фиксируется в соотпвтствующем положении, з итырь с де- тглгм- передае1ся.1;й следующий пресс для осу:;;ос ;алегц я последующей штамп оч- нои операции в с-ятсматическом режиме. Ф о р vi у л а изобретения Механическая рука к прессу, с дерха- щая основание, вертикально смонтирован- иыи КЗ основа 1ии с уст новпенным на нем консольным рычагом с захвптным органом, механиз.ч вертикального возэратно- паступател:..чого и- вращательного пере1 ещен р захвз п-:ого органа, кинематически свйзангны;;- с ползуном пресса, о т г и- ч а 10 ш. а я с я те.-- ;, что, с целью расширения технологических возможностей, она снабжена механизме. горизонтального возвратно-поступательного перемещения захватного органа и дкумя боковыми кронштейнами с отверстиями, на вертикальном валу выполнен копирный паз, консольный рычаг выполнен в виде двух параллельных скалок, связанных между собой рабочей плош,адкой, на которой установлен захватный орган, механизм зозвратно-поступа- тельгюго .: вращательного движения захватного органа выполнен в виде подпружиненной относительно основания втyлк ;, устанозленной на вертикальном валу, ролика, закрепле1;ногс на втулке с возможностью взаимодействия с копирным пазом вертикального вала, кронштейна, один конец которого закреплен на ползуне, а другой установлен с возможностью взаимодействия с втулкой, при этом два боковые крониггейна с отверстиями установлены с возможностью взаимодействия со скалками и жестко закреплены на втулке, а механизм горизонтального возвратно-поступательного перемещения захватного органа выполнен в виде двух шарнирно связанных между собой и подпружиненных относительно друг друга рычагов, свободфиг. 2
.5-5
в-в
Фиг.З
ФиёЛ
Фиг.7
Составитель В.Балашова Техред М.Моргеитал
Корректор А.Обручар
Редактор А.Мотыль
It r.nMulTeTa по изсбретениямТоТрь.тиям при ГКНТ СССР ВНИИПИ Государстаеннот о ет -.Р
-- -- -- ::
ные концы которых связаны соответственно с консольным рычагом и подпружиненной втулкой, упорной площадки, установленной, на основании, и опорного ролика, установленного на связанных между собой двуплечих рычагах с возможностью взаимодействия с упорной площадкой.
Вид г
Д-М
Фиг.
Корректор А.Обручар
| Механическая рука к прессу | 1978 |
|
SU848368A1 |
| Способ обработки медных солей нафтеновых кислот | 1923 |
|
SU30A1 |
