(21)4153602/25-08
(22)01.12.86
(46) 23.05.88. Бюл. № 19 (72) И.В. Копкарев
(53)62-229-72(088.8)
(56)Авторское свидетельство СССР № 1136935, кл. В 25 J 15/00, 1982.
Авторское свидетельство СССР № 1180265, кл. В 25 J 15/00, 1984.
(54)ЗАХВАТ
(57)Изобретение относится к машиностроению и может быть использовано для зажима и манипулирования деталями в автоматическом оборудовании. Цель изобретения - повышение надежности зажима, точности позиционирования деталей в захвате и расширение технологических возможностей за счет увеличения угла раскрытия захватных рыча, гов. Захват имеет шток 3, который при перемещении через шарнирно связанные тяги 4 воздействует на рычаги 6 и 8. При повороте рычагов 6, жестко связанных с зажимными рычагами 8 сто порным механизмом, происходит пере- мещение губок 1 1 к зажимаемой детали.. Когда зажимные рычаги 8 доходят до ограничителей сближения 13, рычаги 6 освобождаются от жесткого соединения
с зажимными рычагами 8. При дальнейшем выдвижении штока 3 тяги 4 вают поворот рычагов 6 вокруг осей 7. Движение губок 11 продолжается прямолинейно, деформируя пружины 12. Одновременно с зтим ограничитель 14 перемещений, связанный со штоком 3, опорными поверхностями 15 обхватывает ролики 10 и жестко соединяет зажимные рычаги 8 с корпусом 1, а губки 11, продолжая сближаться, зажимают де-..
таль, центрируя ее относительно захвата. 1 з.п.ф-лы, 3 ил.
СЛ
«1/11
Изобретение от 5осится к машиностроению, в частности к станкам-авто- мфтам, промышленным роботам и манипу- лйторам, и может быть использовано адя зажима и манипулирования деталями, подвергающимися различным технологическим операциям в автоматических линиях.
Цель изобретения - повышение надёжности зажима, точности позициони- р }эвания деталей в захвате и расширение технологических возможностей зах
в.
1та за счет увеличения угла раскры
захватных рычагов,
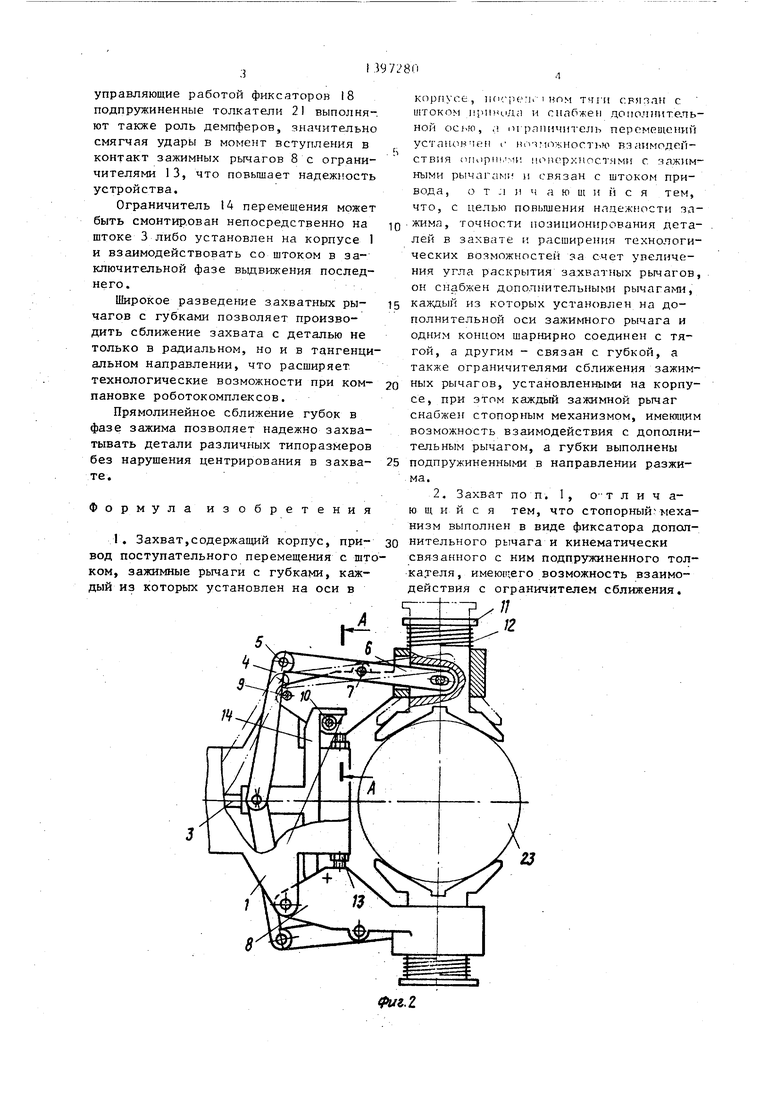
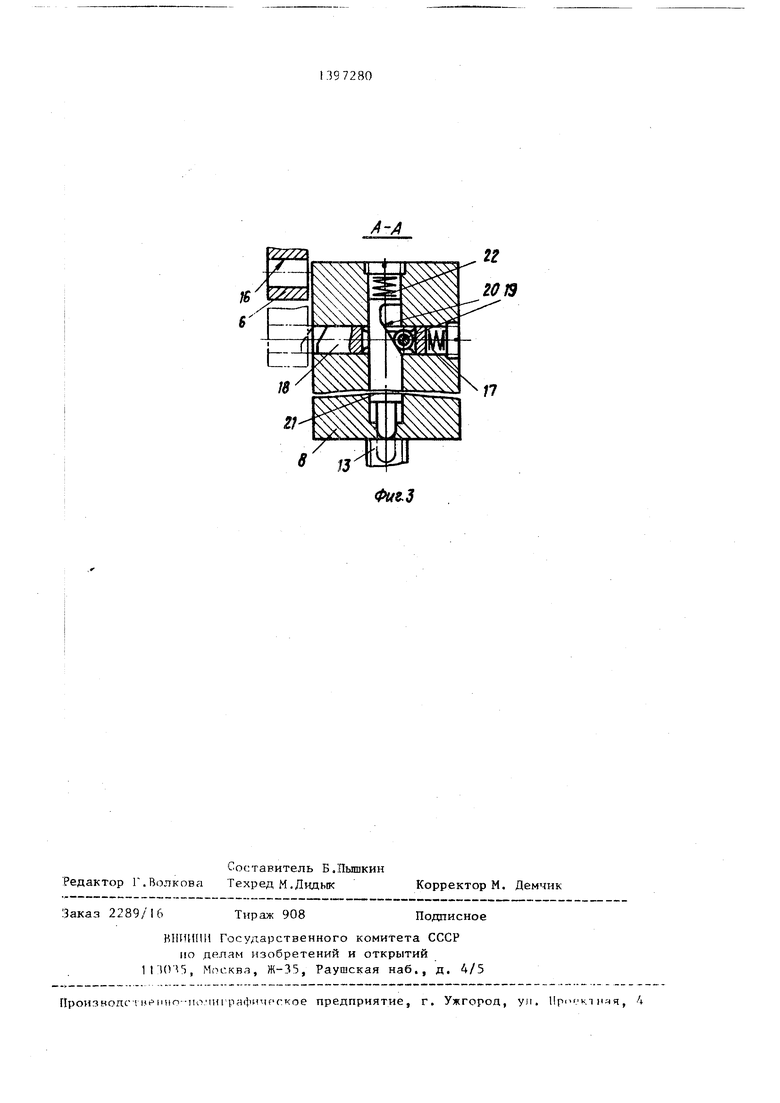
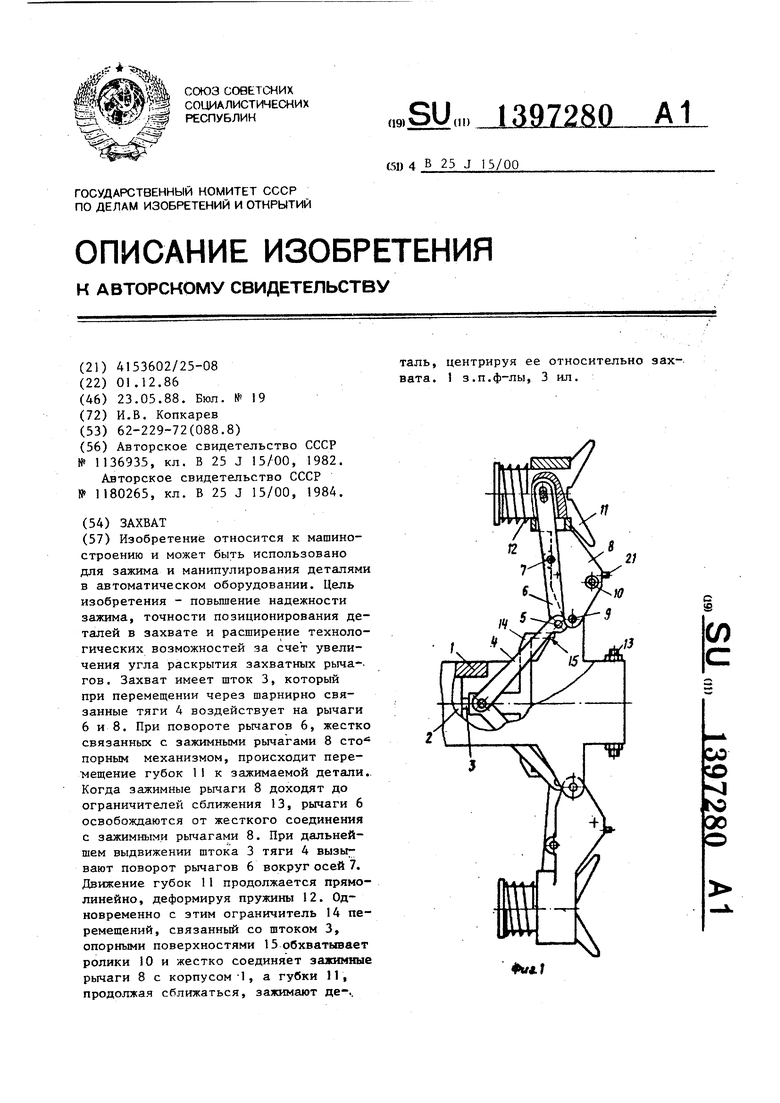
На фиг,1 изображен захват в откры- тЬм положении; на фиг.2 - то же, в за- кЬытом положении; на фиг, 3- разрез АгА на фиг.2.
; Захват содержит корпус 1 ,. установ- л|енный на руке робота (не показано), привод 2 поступательного перемещения например силовой цилиндр, штоком 3 Ш арнирно соединенный с тягами 4, каж- из которых другим концом с по- мрщью шарнира 5 соединена с концом рЬтчага 6, размещенного на оси 7 за- жрмного рычага 8, установленного на оЬи 9 в корпусе 1 и снабженного роли- крм IО и подвижно установленной губ- 1 1, поджатой витой пружиной 12 скатия в направлении разжима и связанной с другим концом; рычага 6. На корпусе 1 смонтированы регулируемые упоры-ограничители Л 3 сближения за- жимных рычагов 8 и размещен связанный е|о ш Гоком 3 ограничитель 14 перемеще- кя с возможностью взаимодействия ойорными поверхностями 15 с роликами Ш рычагов 8. На каждом из зажимных рЬгчагов 8- смонтированы стопорные механизмы, имеющие западающий в отверстие 16 рычага 6 под действием витой Пружины 17 сжатия фиксатор 18 с роликом 19, контактирующий с копирной поВ ерхностью 20 толкс1теяя 21, поджатого витой пружиной 22.
Захват работает следующим образом;. В исходном положении шток 3 привода 2 втянут. Губки 11 под действием Дружин 12 поджаты к зажимным рычагам; 8, а связанные со штоком 3 тяги 4 через рычаги 6 воздействуют на рычаг ги 8, удерживая их в разведенном положении. Рычаги 6 под действием пру- ямн 12 губок 11 развернуты на осях 7 таким образом, что шарниры 5 приближены к осям 9, и дополнительно удерживаются в этом положении фиксаторами
0
5
5
0 5 0 0
0
5
18, западающими в отверстия 16 рычагов 6 под действием пружин 17. При этом ролик 19 устанавливается во впадине копирной поверхности 20 толкателя 21, который находится в нижнем положении. Пружр на 22 разжата.
При подведении захвата к детали 23 шток 3 выдвигается, тяги 4, воздействуя на короткое плечо, заключенное между шарниром 5 и осью 9, производят ускоренный поворот вокруг осей 9 зажимных рычагов 8, жестко сцепленных с рычагами 6. Губки 11 приближаются к поверхности детали 23. В завершающей фазе поворота зажимные рычаги 8 вступают в контакт с упорами-ограничителями 13 и прекращают дальнейшее перемещение. Рычаги отрегулированы таким образом, что при данном положении губки 11 соосны между собой. Одновременно с этим толкатели 21, вступая в контакт с упорами 13, утапливаются, сжимая пружину 22 и воздействуя копирной поверхностью 20 на ролики 19 фиксаторов 18, при этом последние, преодолевая усилия пружин 17, утапливаются и выходят из отверстий 16, чем освобождают рычаги. 6 от жесткого соединения с зажимными рычагами 8. При дальнейшем вьдвижении штока 3 тяги 4 вызьшают поворот рьтагов 6 вокруг осей 7, прекративших движение рычагов 8. Сближение губок 11 продолжается прямолинейно, деформируя пружины 12. Одновременно с этим ограничитель 14 перемещений, двигаясь вместе со штоком 3, опорными поверхнос- тями 15 охватьтает ролики 10 и тем самым жестко Соединяет зажимные рычаги 8 с корпусом 1. Губки 11, продолжая сбл;ижаться, зажимают деталь 23, центрируя ее относительно захвата. В завершающей фазе рассмотренных перемещений сближение губок 11 происходит при воздействии тяг 4 на длинное плечо рычагов 6, заключенное между шарниром 5 и осью 7, что обеспечивает повьнпенные усилия зажима детали 23, которая переносится затем для выполнения другой технологической опер ации.
Освобождение детали осуществляется в обратном порядке,
Фиксаторы 18 исключают нежелательные перемещения губок 1I в случае, если сопротивления повороту рычагов 8 (например, трение в осях 9) пре- вьшают жесткость пружин 12. При этом
управляющие работой фиксаторов 18 подпружиненные толкатели 21 выполняют также роль демпферов, значительно смягчая удары в момент вступления в контакт зажимных рычагов 8 с ограничителями 13, что повышает надежность устройства.
Ограничитель 14 перемещения может быть смонтир.ован непосредственно на штоке 3 либо установлен на корпусе 1 и взаимодействовать со штоком в заключительной фазе вьздвижения последнего.
Широкое разведение захватных рычагов с губками позволяет производить сближение захвата с деталью не только в радиальном, но и в тангенциальном направлении, что расширяет технологические возможности при компановке роботокомплексов.
Прямолинейное сближение губок в фазе зажима позволяет надежно захватывать детали различных типоразмеров без нарушения центрирования в захвате.
Формула изобретения
1. Захват,содержащий корпус, привод поступательного перемещения с штком, зажимные рычаги с губками, каждый из которых установлен на оси в
0
5
корпусе, lidc-jieMi 1 ном тяги срипан с UITOKOM iipiKHi/ui и снабжен дополнительной ocf-ю, .. 1И рапмчитсль перемещений устанс1вче11 i Hii-i ioxHocTiiHi взаимодействия iruipiih ;.n 1и- 1нфхт1остями с зажимными рычагами и связан с штоком привода, о т л и ч а ю щ и и с я тем, что, с целью повышения надежности зажима, точности позиционирования деталей в захвате и расширения технологических возможностей за счет увеличения угла раскрытия захватных рычагов, он снабжен дополнительными рычагами, каясдый из которых установлен на дополнительной оси зaжи ffloгo рычага и одним концом шарнирно соединен с тягой, а другим - связан с губкой, а также ограничителями сближения зажимных рычагов, установленными на корпусе, при этом каждый зажимной рычаг снабжен стопорным механизмом, имеющим возможность взаимодействия с дополнительным рычагом, а губки выполнены 5 подпружиненными в направлении разжима.
2. Захват по п. 1, л и ч а- ю щ и и с я тем, что cтoпopный механизм выполнен в виде фиксатора дополнительного рь1чага и кинематически связанного с ним подпружиненного тол- ка.теля, имеющего возможность взаимодействия с ограничителем сближения.
0
0
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватная головка манипулятора | 1986 |
|
SU1342727A1 |
| Захватное устройство | 1987 |
|
SU1504092A1 |
| Механизм для открывания и закрывания откидной крышки ящика | 1985 |
|
SU1339050A1 |
| Захватное устройство | 1985 |
|
SU1268405A1 |
| Захват | 1980 |
|
SU905061A1 |
| Захватное устройство | 1989 |
|
SU1708603A1 |
| Захватное устройство | 1987 |
|
SU1426784A1 |
| Захватное устройство | 1987 |
|
SU1495122A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1989 |
|
RU2044620C1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2022781C1 |
Т
тх/;
/2
8
13
Составитель Б.Пышкин Редактор Г.Волкова Техред М.ДнДЫККорректор М. Демчик
Заказ 2289/16
Тираж 908
ВИИИПИ Государственного комитета СССР
110 делам изобретений и открытий inOTi, Москва, Ж-35, Раушская наб., д. 4/5
Подписное
