1
Изобретение относится к обработке металлов давлением, в частности к средствам автоматизации при штамповке.
Цель изобретения - расширение технологических возможностей.
Рычаг продольного перемещения получает качательное движение от механизма , содержащего шатун и связанный с ним кривошип, шестерню, установленную на одном валу с кривошипом, зубчатый сектор, зацепленный с шестерней, и несущий ролик, контактирующий с кулачком продольного перемещения.
Кроме того, с целью расширения номенклатуры штампуемых поковок путем придания каретке вертикального перемещения, устройство содержит раму, несущую роликовые направляющие подвижной каретки, поворачивающуюся при подъеме каретки вокруг оси, параллельной направл нию горизонтального движения каретки и сочлененную с пЬмощью двух пространственных шарниров и тяги вертикального перемещения с двуплечим рычагом, несущим ролик, контактирующий с кулачком продольного перемещения.
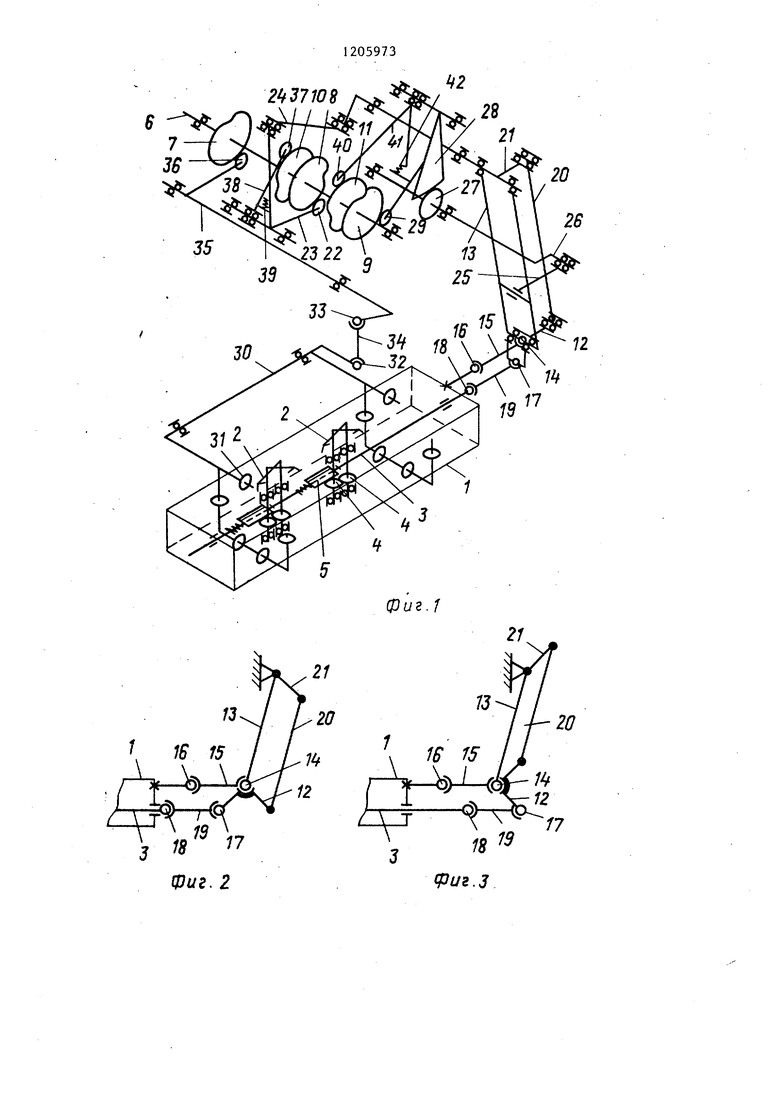
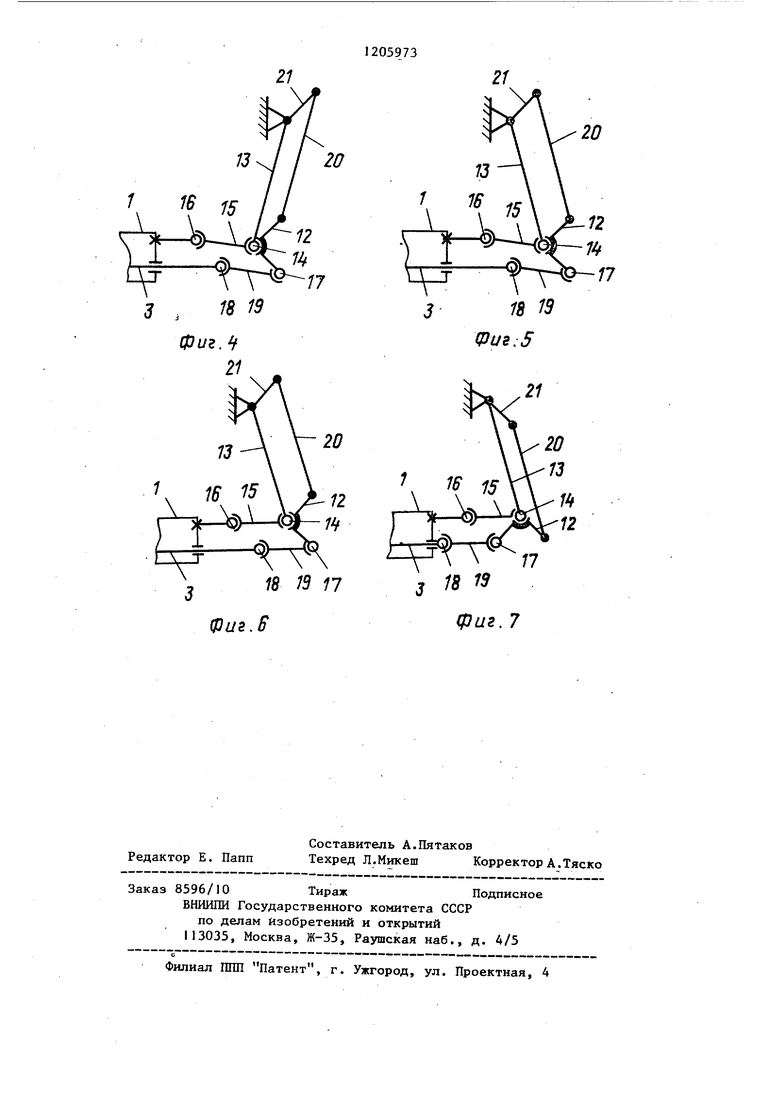
На фиг.1 изображена кинематическая схема устройства; на фиг.2-7 показаны последовательные фазы положений элементов привода.
Устройство содержит подвижную каретку 1, на которой размещены захватные органы 2, приводимые в действие валом 3 раскрытия захватов, соединенным с двумя шестернями 4, закрепленными на осях захватных органов 2 с помощью подпружиненной прлзушки 5, кулачковый привод движения каретки и захватных органов 2, содержащий распределительный вал 6 с посаженными на него кулачком 7 вертикального перемещения, кулачком 8 раскрытия захватов, кулачком 9 продольного перемещения и двумя замыкающими кулачками 10 и 11, механизм преобразования движений, содержащий угловой рычаг 12, шарнирно установленный на оси рычага 13 продольного перемещения, несущей пространственный шарнир 14, соединенный через тягу 15 продольного перемещения и другой пространственный шарнир 16 с подвижной кареткой 1. Один конец углового рычага 12 соединен через два прост
2059732
ранственных шарнира 17 и 18 и тягу 19 раскрытия захватов с зажимным валом 3 подвижной каретки 1, а другой конец через вспомогательную тягу
5 20, параллельную рычагу 13 продольного перемещения, соединен с двуплечим рычагом 21, получающим качательное движение от ролика 22, контактирующего с кулачком 8 раскрытия
10 захватов, через двуплечий рычаг 23 и промежуточную тягу 24. Рычаг 13 продольного перемещения приводится в действие механизмом, содержащим шатун 25, связанный с кривошипом 26,
15 шестерню 27, зубчатый сектор 28, несущий ролик 29, контактирующий с кулачком 9 продольного перемещения. Подвижная каретка 1 закреплена в раме 30 с помощью роликовых направ20 ляющих 31. Рама 30 сочленена с помощью двух пространственных шарниров 32 и 33 и тяги 34 вертикального перемещения с двуплечим рычагом.35, не- сутцим ролик 36, контактирующий с ку25 лачком вертикального перемещения.
Замыкающий кулачок 10, контактирующий с роликом 37, установленным на рычаге 38, соединенном с двуплечим рычагом 23 через пружину 39, служит
30 для силового замыкания ролика 22 и кулачка 8 раскрытия захватов. Замыкающий кулачок 11, контактирующий с роликом 40, установленным на двуплечем рычаге 41, соединенном с зубчатым сектором 28 через пружину 42, служит для силового замыкания ролика 29 и кулачка 9 продольного перемещения.
дд Устройство работает следующим образом.
В исходном положении механизм преобразования движений находится в . положении, показанном на фиг.2. Захватные органы 2 при этом находятся возле исходного положения захвата заготовки и раскрыты. При враще- :НИИ распределительного вала 6 кулачок 8 раскрытия захватов вращает50ся и через ролик 22 поворачивает двуплечий рычаг 23 по часовой стрелке. Сочлененная с ним промежуточная тяга 24 поворачивает двуплечий рычаг 21 против часовой стрелки, вспо51могательная тяга 20 поднимается, поворачивая угловой рычаг 12, который через пространственные шарниры 17 и 18 и тягу 19 раскрытия захва35
45
тов перемещает вал 3 раскрытия захватов влево относительно каретки 1, Иехан1 зм преобразования движения занимает положение, показанное на фиг.3. Подпружиненные ползушки 5 при этом поворачивают шестерни 4 и закрепленные на их осях захватные органы 2. Левая пара захватных органов зажимает заготовку на исходной позиции, а правая пара зажимает вытолкнутую из штампового ручья поковку. При дальнейшем повороте распределительного вала 6 кулачок 7 вертикального перемещения 7 нажимает на ролик 36, двуплечий рычаг 35 поворачивается по часовой стрелке, поворачивая с помощью пространственных шарниров 32 и 33 и тяги 34 вертикального перемещения подвижную раму 30 и поднимая роликовые направляющие 31 вместе с кареткой 1 Механизм преобразования, движения занимает положение, показанное на фиг.4. При движении подъема каретки взаимное положение вала 3 раскрытия захватов и каретки 1 не меняется, захватные органы 2 надежно удерживают заготовку над исходной позицией и над ковочным ручьем штампа. .
При дальнейшем повороте распределительного вала 6 кулачок 9 продольного перемещения через ролик 29 сектор 28 и шестерню 27 поворачива- ет кривошип 26 в положение, показанное на фиг.1. Шатун 25, соединяющий кривошип 26 с рычагом 13 продольного перемещения, переводит механизм преобразования движений в положение, показанное на фиг.5. Каретка 1 перемещается в крайнее правое положение. Левая пара захватных органов 2 перемещает исходную заготовку в положение над штамповочным ручьем, а правая пара захватных органов 2 выносит отштампованную поковку из штампового пространства.
15
2&
2059734
При дальнейшем повороте распреде- Jштeльнoгo вала 6 радиус кулачка 7 вертикального перемещения уменьшается и подвижная рама 30 под собст- 5 венным весом и весом каретки 1 опускается вниз, перемещая вниз пространственные шарниры 32 и 33 и тягу 34 вертикального перемещения и поворачивая двуплечий рычаг 35 проfO тив часовой стрелки. Механизм преобразования движений приходит в положение, показанное на фиг.6. Левая пара захватных органов 2 вносит исходную заготовку в полость штампа.
При дальнейшем повороте распределительного вала 6 радиус кулачка 10 увеличивается , а радиус Кулачка 8 уменьшается. Рычаг 38 поворачивается против часовой стрелки и через пружину 39 увлекает за собой рычаг 23, который через промежуточную тягу 24 поворачивает двуплечий рычаг 21 по часовой стрелке. Вспомогательная тяга 20 опускается вниз, повора-- чивая угловой рычаг 12, который че- |рез пространственные шарниры I7 и 18 и тягу 19 раскрытия захватов перемещает вал 3 раскрытия захватов вправо относительно каретки 1. Механизм преобразования движений занимает положение , показанное на фиг.7. Подпружиненные ползушки 5 при этом поворачивают шестерни 4 и закрепленные на их осях захватные органы 2. Левая пара последних рсвобождает внесен35 ную.в полость штампа исходную заготовку, а правая пара захватных губок освобождает готовую поковку, которая падает вниз и выносится из пресса.
40 При дальнейшем повороте кулачкового вала радиус кулачка 11 увеличивается. Рычаг 41 поворачивается и через пружину 42 увлекает за собой сектор 28, который поворачивает шес45 терню 27 и кривошип 26 и перемещает шатун 25 . Механизм преобразования движений приходит в положение, показанное на фиг. 2. Далее, цикл повторяется.
30
20
фиг. f
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для шаговой подачи заготовок в зону обработки | 1984 |
|
SU1346306A1 |
| Клещевая подача к горячештамповочному прессу | 1989 |
|
SU1690920A1 |
| Грейферное подающее устройство к прессу | 1989 |
|
SU1676724A1 |
| Устройство для изготовления проволочных штырей и запрессовки их в изделие | 1988 |
|
SU1593879A2 |
| Автоматическая линия для изготовления арматурных каркасов | 1984 |
|
SU1337176A1 |
| Устройство к прессу перемещения материала | 1988 |
|
SU1507498A1 |
| Трубогибочный автомат | 1986 |
|
SU1526871A1 |
| Робот к листоштамповочному прессу | 1986 |
|
SU1465158A1 |
| Швейная машина зигзаг | 1982 |
|
SU1089189A1 |
| Загрузочное устройство | 1975 |
|
SU558776A1 |
13
16 15
V
i
Фи. 2
12
1
/ т
л
(риг.З
13
/ т
л
(риг.З
J3
15
A
12 lii
17
18 13
фиг. Ч 21
73
20
V
n
16 15
)i-4
л I
ffi 75 11
фи.В
20
21
Редактор E. Папп
Составитель А.Пятаков
Техред Л.Микеш Корректор А.Тяско
Заказ 8596/10 ТиражПодписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. А/5
Филиал ШШ Патент, г. Ужгород, ул. Проектная, 4
| Устройство для перемещения заготовок | 1978 |
|
SU747588A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
