контурную CKO l: CTb с урОПИЯ о,)/
при работе по трем коорлинатам к уровню, близкому к 1, и с уровня 0,707 при работе но двум координатам к уровню, близкому к елинице, не прибег ая к переключениям н гхеме
1
Изобретение относится к автомати и вычислительной технике и может быть использовано в системах числового программного управления станками при построении интерполяторов с оценочной функцией,
Цель изобретения - обеспечение стабилизации скорости подачи при любой траектории пе эеме1цения независимо от числа координат и повьппение быстродействия.
На чертеже приведена схема предлагаемого устройства.
Устройство содержит генератор 1 импульсов, первый и второй триггеры 2 и 3, первьй элемент ИЛИ 4, вторую группу триггеров 5, 6 и 7, второй элемент ИЛИ 8, делитель 9 на три, третий триггер 10, элемент И 11, делитель 12 два на три, третий элемент ИЛИ 13, элементы 14 и 15 задержки, первую группу триггеров 16, 17 и 18. S-входы триггеров 16, 17 и 18 являются входами устройства и подключаются к выходам интерполятора по осям X, Y, Z соответственно. Выход элемента ИЛИ 4 является выходом устройства. Частота генератора 1 делится на триггере 2 на два и с прямого выхода триггера 2 через элемент ИЛИ 4 поступает на выход устройства. Если триггер 3 установлен По S-входу, то частота f /2 является единственной выходной частотой устройства. Если же триггер 3 сбрасывается по R-входу, то очередной сигнал установки триггера 3, посту- паюгций с инверсного выхода триггера 2, добавляет к импульсам частоты один импульс, увеличивая. ,.;ы;с( - ную частоту устройства (чем иплд сбрасывается триггер 3, тем .ильное
ус I 1)й. гиа и Hf и:(меняя частоты негиП ора. К тому же, час гота генератора должна гол,ко 2 раза препо- схс.чить максимально заданнук часто- 1 у И пч р11оляиии, что меньше, чем по 1п:е;ч. ичпеетных устройстнах. 1 нл,
0
5
0
возрастает ьыходная частота устрой- стпа).
Устройство работает следующим образом.
В режиме треккоординатной интерполяции на входы устройства поступают сигналы fj, „, f, соответствующие выходам по осям интерполятора. На группе триггеров 16, 17 и 18 производится выделение двух меньших частот, причем минимальная частота выделяется на двух триггерах. Например, если f, макс f ,
7. . триггере 16 выделяется f, синхронно
с fx , на триггере 17 - fij синхронно с f|. и на триггере 18 - f синхронно с Г„(задержками на переключение триггеров пренебрегаем). Выходные сигналы триггеров 16, 17 и 18 собираются на элементе ИЛИ 13 и через элемент 14 задержки поступают на первый вход элемента И 11, а через элемент 15 задержки - на R-вход триггера 10. Таким образом, на указанных входах элементов 10 и 11 дей-, ствуют сумма сигналов ( ), где и f. , f д,„„ - средняя и меньшая из трех входных частот.
На группе из триггеров 5, 6 и 7 вьщеляется Г,цц , причем на каждом из триггеров - синхронно с соответствующей входной частотой. Выходные сигналы триггеров 5, 6 и 7 собираются на элементе ИЖ 8, с выхода которого частота 3 f;,, поступает на делитель 9 с коэффициентом деления 3. Таким образом, на S-вход триггера 10 поступают сигналы с частотой f,,H4- Каждый такой сигнал уста ианливает триггер 10 в 1, инверсный триггера 10 закрывает по второму входу элемент И 11. Поэтому
31
одноименный импульс, соответствующий Г„„„ и поступающий с выхода элемента ИЛИ 13, благодаря задержке на элементе 1А через элемент И 11 не проходит. Таким образом, группа элементов 10, 11 и 15 работает как вычитатель и на выходе элемента И 11 образуется частота (f -i-2f;, «ИИ f с +f wnM ) Эта частота по- ступает на делитель 12 с коэффициен- том давления 2/3 (два из трех) и далее на R-вход триггера 3. Синхрон- TIO с частотой переключения инверсного выхода Tpvirrepa 2 импульсы этой частоты выделяются на прямом выходе триггера 3 и через элемент ИЛИ 4 подаются на выход устройства. В результате образуется тактовая часто
та f
r
оказывающая стабилизирующее
действие на величину контурной скорости.
В интерполяторе с оценочной функцией контурная скорость в выражении через частоту определяется соот- нощением
f. f.
1нк ,+к1 1+к7 +Кг
К,
f /f к f /f
c -Moiicc 2 -мии )
f.
Ч
,к - максимальная, средняя (т.е.
I вторая по величине) и макси- 35 мальная из частот по осям х и г
оэффициент нестабильности контур- 40 скорости
L:
fr
1+К,+К
достигает минимума при К( K,j 1 и равен 4з /3 « 0,577.
При работе схемы стабилизации на входе интерполятора действует частота f , равная
f: f,-b(().
где (3 - коэффициент, меньщий 1.
Скорректированная тактовая частота f равна сумме исходной тактовой частоты и некоторой части суммы частот (f +fMMM ) Здесь частоты берутся со знаком (), так как если на входе интерполятора действует скорректированная (неизменная) частота f , то и на его выходах получаются измененные частоты f , f , fi HHСкорректированное значение контурной частоты имеет вид
(f
)(f:) -H(f
«л ИИ
f:«.)fcfr
1+(1-p)K,+(1-)K2
20
Подставив вьфажение f, жение для у . , получим
в вьфаf
,
Т+ТТ-рУкГ+П-рТк
Коэффициент нестабильности ско- рости подачи Х- при этом имеет
и НС
вид
„ к 1-(
1 + (1-/)К,+(1-/})К,,
1+(T-ji)(K,+K,)
Если (движение происходит вдоль одной из осей координат),
Ук.(0,0) 1, т.е. скорость подачи равна заданной.
При отсутствии стабилизации наибольшее отклонение скорости происходит при К,. При работе схемы стабилизации в этом случае
Уис /3-2(.. Допустим, что значение равно 1,
тогда l2n Р -j-
0,63397. Так как такое значение сложно реализовать технически, в качестве величины для р выбирают ближайщее к этому числу значение, т.е. р 2/3. Поэтому коэффициент деления делителя 12 равен ,6666,
После определения величины |} уточним выражение для
УНГ
Ji
1+(Т-/зИк,+KJ
«-к +к1
4и-к -«-кГ Т+П-о7бббТ(к7+к7Г
1+0,ЗЗА(К,+К/)Для нахождения наибольшего и наи- неньшего значений jlc необходимо найти область определения функции у . Очевидно, что « н О Разделив все члены этого неравенства на ,Hc . получим 1 К, К V 0. Для определения предельных отклонений необходимо определить экстремальное значение функции двух переменных (от К, и Kj) и значения функции на границах ее области определения .
Приравняв нулю частные производные по К, и К, от у(, получим координаты ее экстремального значения, а затем и само экстремальное (в данном случае минимальное) значение.
- П il - -ТкГ дК,
Откуда К,К 1 -|}
(
ТТКГру
К,1, К,1
ll + 1 + l
г 0,9045
V И П +
( Т о7зз4ТТ+Т)
- 1,038.
Таким образом, колебания контурной скорости составляют (-9,62- ,8)Z, т.е. снижаются до допустимых пределов.
В режиме двухкоординатной интерполяции на входах устройства действуют две частоты из трех, поэтому из трех триггеров 16, 17 и 18 работает тольк один. На выходе работающего триггера вьщеляется меньшая из двух действующих входных частот. Группа из триггеров 5, 6 и 7 не работает, поэтому не работают элементы 8 и 9. Выходная частота одного из триггеров группы 16, 17 и 18 через элемент ИЛИ 13, элемент 14 задержки, элемент И 11, который открыт по второму входу, так как триггер 10 сброшен по входу R через элемент 15 задержки, поступает на делитель 12. Две трети сигналов этой частоты проходят на R-вход триггера 3, с помощью которого изменяется выходная частота f устройства.
В этом режиме при отсутствии стабилизации коэффициент нестабильности контурной скорости, как известно, описывается выражением
4i
+К
НС,
ft
I+K
где К f
и f.
iwakc миц
большая И меньшая из двух действующих частот по осям.
При движении по двум координатам
Ми ц
0. а f fMoiKc-fc- Тогда
, К,К, следовательно.
У НС
lUK
Т+о7зз4к
5
0
5
0
5 д
0
при К,1 и
I
.o) ТЙ ш1Т;о)Ь 06066
в первом случае минимум у cj равный 0,707, достигается при , во втором минимум равен 0,948 и до- м стигается при ,334, при значение уц составляет 1,06. Таким образом, при двухкоординатной обработке колебания контурной скорости составляет (-5,2 - +6)%.
В режиме однокоординатной обработки на входах устройства действует лишь одна частота, поэтому ни один из входных триггеров 16, 17 и 18 не переключается. Из всех элементов устройства работают генератор 1, триггер 2 и элемент ИЛИ 4. На выход устройства подается частота .
Устройство не требует увеличения тактовой частоты и не требует анализа количества координат перемещения по контуру. Стабилизация осуществляется единообразно, независимо от числа координат. В результате появляется возможность стабилизировать скорость подачи при любой траектории перемещения как в 3-мерном, так и в 2-мерном пространстве.
Формула изобретения
Устройство для стабилизации скорости подачи в станках с программным управлением, содержащее последовательно соединенные генератор импульсов, первый триггер и первый элемент ИЛИ, отличающееся тем, что с целью обеспечения стабилизации
71
скорости подачи при любой траектории перемещения независимо от числа координат и повышения быстродействия в него введены второй и третий триггеры, первая и вторая группы триггеров, пбследовательно соединенные второй элемент 11Ш1 и делитель на три, последовательно соединенные третий элемент ИЛИ, первый и второй элементы Зсядержки, а также последовательно соединенные элемент И и делитель два на три, второй триггер соединен ,Я-входом с инверсным выходом первого триггера, а выходом - с первым входом первого элемента ИЛИ, второй вход которого соединен с прямым выходом первого триггера, S-вход первого и R-вход второго триггеров первой группы соединены с первым входом устройства, S-вход второго и R-вход третьего триггеров первой группы соединены с вторым входом устройства S-вход третьего и R-вход первого триггеров первой группы соединены с третьим входом устройства, S-вход первого и R-вход второго триггеров
Редактор М.Дылын
Составитель А.Исправникова
Техред М.ХоданичКорректор А.Обручар
Заказ 3580/49
Тираж 863Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
h°
второй 1 руппы соединены с выходом первого триггера первой группы, S-вход второго и К-вход третьего триггера второй группы соединены с выходом второго триггера первой группы, S-вход третьего и R-вход первого триггеров второй группы соединены с выходом третьего триггера первой группы, выход делителя Hji три подключен к S-входу третьего триггера, R-вход которого соединен с выходом второго элемента задержки, инверсный выход третьего триггера подключен к первому входу элемента И, второй вход которого соединен с выходом первого элемента задержки, выход делителя два на три подключен к R-BXO- ду второго триггера, входы второго элемента ИЛИ соединены с прямыми выходами триггеров второй группы, входы третьего элемента ИЛИ подключены к прямым выходам триггеров первой группы, вход первого триггера соединен с выходом генератора импульсов, выход первого элемента ИЛИ является выходом устройства.

| название | год | авторы | номер документа |
|---|---|---|---|
| ЛИНЕЙНО-КРУГОВОЙ ИНТЕРПОЛЯТОР | 1991 |
|
RU2010293C1 |
| Линейный интерполятор для систем интерактивной графики | 1988 |
|
SU1608691A1 |
| Устройство для программного управления | 1984 |
|
SU1218368A1 |
| Устройство для стабилизации скорости подачи в станках с программным управлением | 1985 |
|
SU1325411A1 |
| Устройство для программного управления | 1985 |
|
SU1290263A1 |
| Линейно-круговой интерполятор | 1985 |
|
SU1259218A1 |
| Многокоординатный линейно-круговой интерполятор | 1988 |
|
SU1603345A1 |
| Цифровой линейный интерполятор | 1989 |
|
SU1709269A1 |
| Программное задающее устройство | 1981 |
|
SU991376A1 |
| Интерполятор | 1988 |
|
SU1541557A1 |
Изобретение относится к области автоматики и может быть использовано в составе интерполятора, работающего по методу оценочной функции. Цель изобретения - расширение функциональных возможностей путем стабилизации скорости подачи при любой траектории перемещения независимо от числа координат и повышение быстродействия. В устройство введены второй 3 и третий 10 триггеры, первая и вторая группы триггеров 16, 17, 18 и 5, 6, 7 соответственно, второй элемент ИЛИ 8, делитель 9 на три, третий элемент ШТИ 13, первый 14 и второй 15 элементы 1-ШИ, зле- мент И 11, делитель 12 два на три. Устройство позволяет из трех дейст- вуюа;их в нем частот по осям координат выделить две меньпше, часть суммы которых используется для повьше- ния тактовой частоты с тем, чтобы контурная скорость не изменялась в больших пределах. При работе по двум координатам в устройстве автоматически выделяется меньшая из двух частот по осям, которая используется для повышения тактовой частоты. Таким образом удается поднять i (Л 00 00 о О5 о а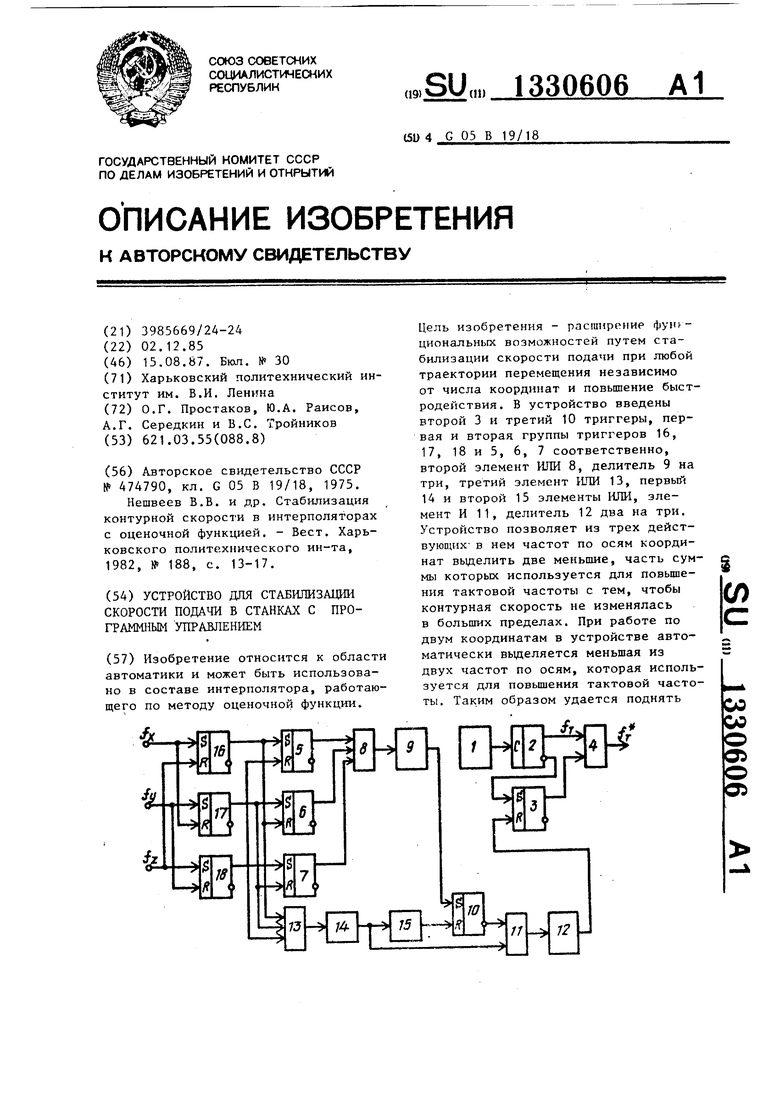
| Устройство стабилизации скорости подачи для станков с программным управлением | 1973 |
|
SU474790A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Нешвеев В.В | |||
| и др | |||
| Стабилизация контурной скорости в интерполяторах с оценочной функцией | |||
| - Вест | |||
| Харьковского политехнического ин-та, 1982, № 188, с | |||
| Насос | 1917 |
|
SU13A1 |
