i Ч (1|Н i i iiiii linuciirevi к авт()мо()и,;ьиому I j)iinciuj|)i V ,i.iH иереьюлки пакетированных i-j) loi-,, iiaiipnMC i кирпичей на поддонах. При ч- гим кл ручка II иыгрузкм грузов о; уще- . 11мя. при помощи 1 ру: опод |1емн()1Ч1 uu|i 1 а.
itf .i.K ичоб)е К П11М ии;1Я пся 11() :(((|(|)1 К гивности выполнения 11)груз() i- I py; O4Hijix laooi .
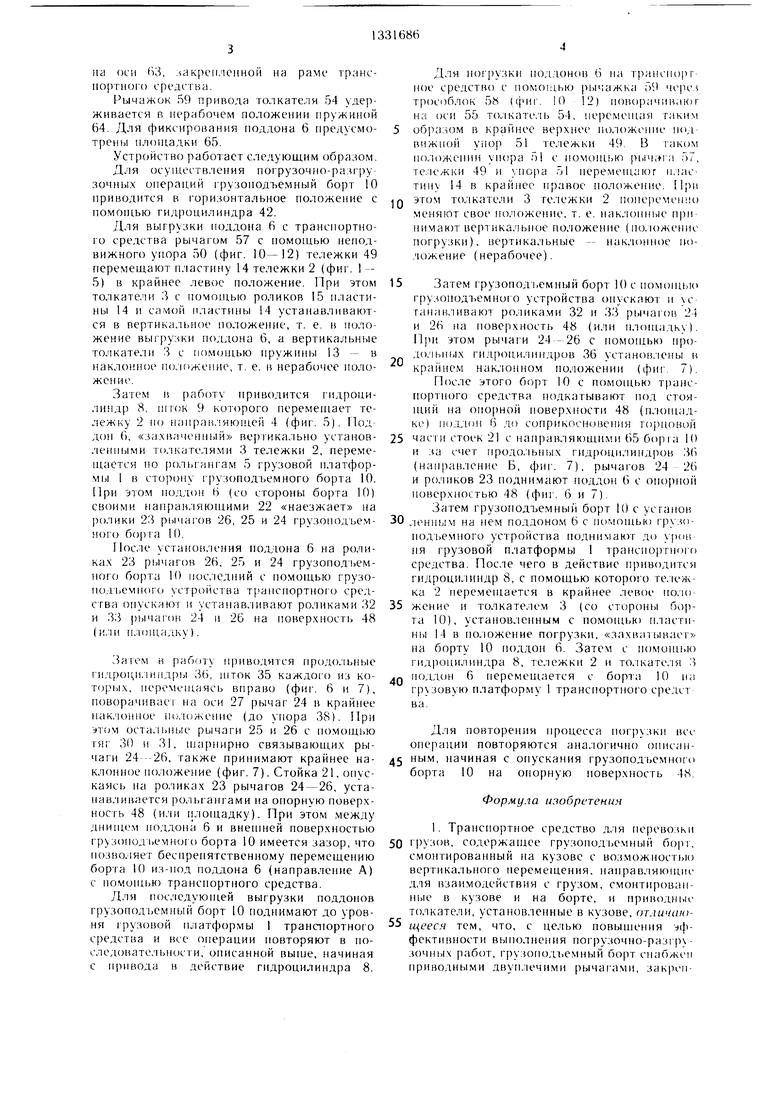
Па i|)nr. 1 илображл но предлаг аемое ует- юГк гво, DOiiiMH НМД; на фи. 2 раз|)е:; Л Л па фп| i., H.I (JHir. Л 1-е.:1сжка, продольный |ia,i iv ;; на (jjiu , 4 вид Б на фиг. Л , ма . Г)ра:(5 е; В В на фиг. I; на
(()И1. i)I py:u) i.eMHbiii борт, Н1)(.доль111,lii la i| ;e; , на фиг. 7 то же, сложенное (i)ei-i) на грузонод ьомный
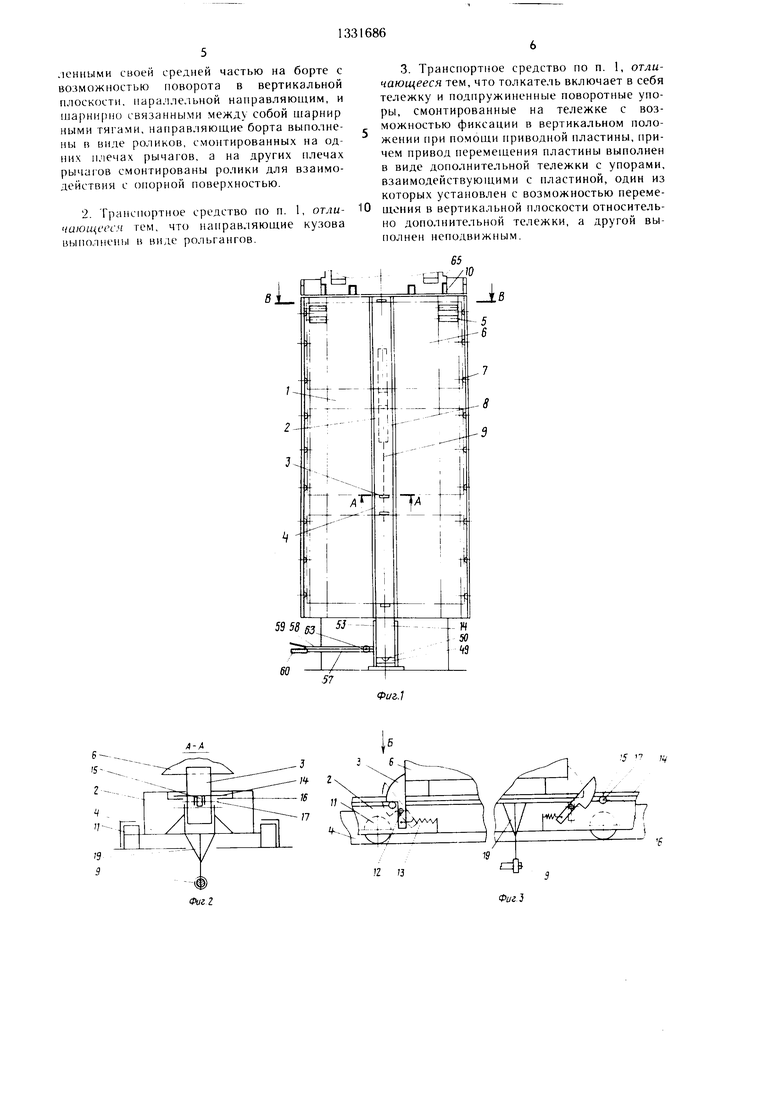
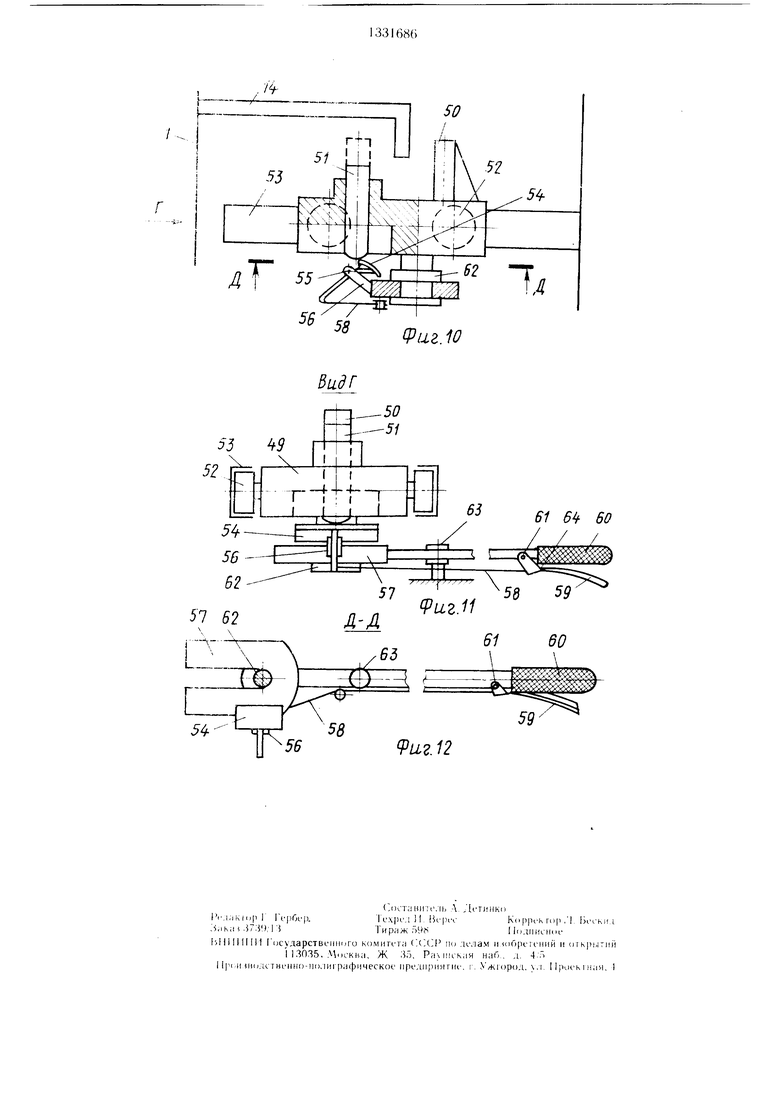
б(. 1Ч1еречп1)1Й )a:ipe;i; на фиг. 9 го же, CBL-j v 1 , г,.: (),1ните. 1ьная ге. и-/лка г yiiopaviH. поперечный pa.)ei; на 4)иг. IIвид Г на (}1иг. 0 (енереди);
на ijiin. 12iiat H- , Л Л па 4 i -
1 paiirnopi Hoe для пе 1ево:(ки на- ке ированпых iin ioB содержит i рузовую H. ia 4io|iM V I ((fiiir. I и 5), на кото)ой емон- i HpoB.iiM.i И ленчч. . с i олка 1 е;1ями 3. на- Н 1авля1оп1,а« 1, p.(,iani о п(,) i, на- )авлЯЮП1И1, ()оли;ки 7 поддона (, ipo.io.ib- iii.iii гнлрицн. шндр X, ()К 9 которого жесч- ко ня .ан с гележко1( 2, грузоподтл МИВ
ПО} ill
Гс. Д жка 2 (4 Ч1 - 1 I имеег ролики 11 .чля ,uнl1я но нal paвляюJueй 4. Толка- е/и Л имелчкп 2 члап()влены на оси 2 и Дср/кива1отся от )извол1)НО1Ч) опрокидв - ианни iip Hiiiiioii Л. В зависимое и (п )ежи- ма )аГ)(111,| )зка или вы1 )узка) о;1пи из толка e. iefi установлены в ве)ти ;альном положения с ипмчнило н lae i HHi.- 4 с роликами 1 Г i. iv; i(i. Ka 1еле11 i, установленной с возмп/кнос I ыо пер -мешения в нан)ав.тяк)- Н1Н.Х К) имежкп 2. .ipyi не установлен в
наклонном но. lOHU li iU с .Н.) 1руЖИНЬ
13. Ролики i,) VC га11 .)В. в тмасгине 14 на оси 17 11 к местах расположения ц;Лг.агел; it Л имеет окна ЬЧ, неоохо- дим)е Д1Я ,еиии 1; астины относ - тел)о I o.;i ка I u-ii , те.тежки 2 с целью усганов.к ння i о. i ка гелей 3 в вертикальное и.:|и наклонное ноложе ие в зависимост намечен) о pe/i-, има работы транс-портного средства (10 рузка или выгрузка).
Ttлежка 2 жесгко связана со ниоком 9 1родолы;о о I ид|)()цилиндра 8 с помощью сгойки I .l и окнами 20 для мон- гажа олка еле11 3 i качения их i вергм
.ТОСКОС И.
1Ь.1.1он Г) имеет )йки 21 д.тя ie()e- мешеиия но ро.. 5 грузовой (()()р- мы 1 ((|)иг. Г) и нан)авляк)ни1е 22 оддо- ia h .1,я 23 р1,)в 24 2fi грузо- 1ол. оорта 10 (фиг. b 8). Р|лча н 24 2ti ус i ia осях 27 29, CM( рон 11111ых iia I р и)1од |, Г)орт 1(1, и
lliapli lp lo C;Uiial b е/К.Чу COOoii с
5
ТЯ 3(.1 И 31. Р)1ЧаГ11 . и 2(:
ро.тика.ми 32 и 33. ilph -яом 15ь. Ч.ч 2i шарнирио связан со M.uioii 3 шгоьа 35
ПрОДО; ЬНО О -ИДрОППЛ ИН .,;: 3), KiipliVC Kf)il poi o И1арнирно coejU iic i- гр.5()под i.eMiii.i ,
бортом 10 с 1 ОМ01111,И) ;.,.-;.; . / .,: V. H I
жан piiiuai Oi 24 и iriK. |1м;; -.ч по UJUir. 7) -рХ -И1 |.( 1 I.CMIiblii fiOjj П
1-наб л1-н )ами н ii;. ;И) 24 и 2)). I рузо1их гьемны( 6cip-; М) : а}Л1И Я1о смсд; |иров; Н ia раме 40 i p ..,чьсмного усг ройства трансг ортног( .ч к. дсчиа с ,o осей 41. на К() борт () можеч noi-.o- рачиваться .lli)й ii. hu isin П с помочило Л1Д)()цилиндра - 2, 1а|)ннрпо счяза}
с -руЗ()1ОД ьемнЫМ Г:ор|-Г)М 1(1 и ра
мой 40 i рузо 1од ьем (.и 11 vc гоп пс тм ii aiic- гного сре.тства.
Во в|1емя опуска ;-i. i I .in мо ми, . i ;..
;«). lA MHOl ij борча |Д . ; ; ,..;Л1ГЧ о i, :
)изонта;илк)е оло/кен;;с ii; ьгги-, м..0 42 (4 Н. S и . ,-, -.р:
ным рузом на io. .. -- .с ,( борта 10 фиходитсч ч- и, in .р . . л мг: . i , а на упоры 43, ia|) сня . ; р.ч мой 40 рузо11ОД-ьеМ1 :1| .. i;i: ;ic j;a , i i;; подт,емиым (и)))то li у --I ,ом i;.;;- ; iiM пая С11язь 4: i . p.ifv: -л ii r:c п.(-л в
СЯ с помощью Ol i 14. :i ,|ili.M ill;
|{.)Мон1ЫО оси 4Г). смоп 11;)01(аи1плх ;; оси -If; роликов 46. и пап|)а|, i .iioHu i 47 ;io;i t c : .ак|пм ленной на бор г- i i
0 ,,
При уст .еИЯЯ l ;iv ,и|;1:Д IAT-I HOI l OOli
та 1() на опорнук пощ-рмюст IS injiii ЛОН1адку) его (4) u- p r C ;;ii loi v/i.c- ia 1)олики 32 и 3. рычаг и; :. 1 ; 2i (4)иг. 68).
j-П 1ИВ{)Д iepeMe ;i. 11,1 ,иЛЛ i:i) i 1
(4)И|-. 10| ВЫ 10ЛН1Ч Г: I.. .TH:r;c 1. пой е. 49. ... i l iviee: i пм, ynoj) Г)0 11 )l, .Л ,;. ; ЛЙ С 103МОЖПОС1 Ml I e i ) . -1 ,t : И Я : t lbliO корпуса е.:к/1- ,и ; . ; 1.1 liM.l; ,;o. л;;-,
0 52 для качения их ю 1;;ч :::11 лЯ101:| i; . ;, (акре ле|1Н)й на раме i j ,;;. lioo ; i ui i; ;),; ства.
i..i. М.) ; il I:; ,i ; Ja i И
в виде толкат еля о4. , :,- i .ш п.. на оси 55 рамки 56, зак еплс1:ч .ч г:а |i..: i;si.. ./,,
с ВОЗМОЖНОСТЬ О К. н |) -)-И)ча.
плоскости. Привод то.кате,,) Г)4 (4)иг. К) и 11) вь нолней в рособлока 58, одип конец К(ггор()го жестко ( на т о, re. ie 54, другой на рулчажке 59 рукояг Q ки 60 рычага 57. .лом рычажок 59 гирован на осг 61, aiv|:i ii ia рь 57, с и)змож.и)1Л ,о качания в т)ри- зотгга. нлоскос; и.
Ие)1. 1еЛеЖКИ 49 ВЫНО,1нен 1 виде рычага 57 (ijuii I и 1:.) одш 5 коней кот о) )Н(. свя laii i е. 49с 1омо1ЦЫ() оси ()2, за.кренлеиио на кме. К- ке 4VI. 57 смон тиро(а:1 с ь /шч./г;- ностыо качания в горизон а. и. мг.чо.чи
на оси ВЗ, : ак1км1ленной на рамс- транс- но 1тно1Ч) средства.
Рычажок 59 привода толкателя 54 удерживается R нерабочем положении пружиной 64. Для фиксирования поддона 6 предусмотрены плон1адки 65.
Устройство работает следующим образом.
Для осуплествления ногрузочно-разгру- зочны.х операций грузонодъемный борт 10 приводится в горизонтальное положение с помощью гидроцилиндра 42.
Для выгрузки поддона 6 с транспортного средства рычагом 57 с помощью неподвижного упора 50 (фиг. 10-12) тележки 49 перемещают нластину 14 тележки 2 (фиг. 1 - 5) в крайнее левое положение. При этом толкатели 3 с помощью роликов 15 пластины 14 и самой пластины 14 устанавливаются в вертикальное положение, т. е. в положение выгрузки поддона 6, а вертикальные толкатели 3 с 1К)МОП1ЬЮ пружищ : 13 -- в наклонное по.чожение, т. е. в нерабочее положение.
Затем в работу приводится гидроцилиндр 8, 111 ГОК 9 которого перемен1ает тележку 2 по напраи; яю1це11 4 (фиг. 5). Поддон 6, «за.хвачениый ве)тикально установ- .|еип1)1ми 1(). 1кателями 3 тележки 2, перемещается по )ольгапгам 5 грузовой платфор- М1)1 I в сторону г|П зоподъемного борта 10. При этом поддон 6 (со сторо)1Ы борта 10) своими напраиляюншми 22 «наезжает на ролики 23 рычагов 26, 25 и 24 грузоподъемного борга И).
После установления поддона 6 на роли- ка.х 23 рычагов 26, 2, и 24 грузопод ьем- ного борта 10 последний с помощью грузо- подт емного устро11стна т{ апсгюртног-о средства опускают и устанавливают роликами 32 и 3i5 |)ычагон 24 и 26 на поверхность 48 (или площадку).
Загем н paotJTy приводятся продольные гидроци,1иидры 3f), iHTOK 35 каждО|-о из которых, перемещаясь вправо (фиг. 6 и 7), поворачнваег на оси 27 рычаг 24 в крайнее нак. юнное Н1: ,1()женпе (до упора 38). При эт(м оста,1ьные рычаги 25 и 26 с помощью тяг 30 и 31, шарпирно связывающи.х рычаги 24-26, также прини.мают крайнее наклонное положение (фиг. 7). Стойка 21, опускаясь на роликах 23 рычагов 24-26, устанавливается ролы-ангами на опорную поверхность 48 (или площадку). При этом между днищем поддона 6 и внеп1ней поверхностью грузопод 1 емного борта 10 имеется зазор, что позволяет беспрепятственному перемещению борта 10 из-под поддона 6 (направление А) с iioMonibK) транспортного средства.
Для пе)следуюн1ей выгрузки поддонов грузоподъемный борт 10 поднимают до уровня рузовой платформы 1 транаюртног о средства и все операции повторяют в последовательности, описанной выше, начиная с нрнвода в действие гидроцилиндра 8.
0
Для погрузки поддонов 6 на транспорт ное средство с помощью рычажка 59 через трособлок 58 (фи1 . 10 12) )рачивак)г на оси 55 то.:1кате, 11 54, перемещая гаким
образом в крайнее верхнее положещк подвижной упор 51 тележки 49. В таком 11олол епии упора 51 с иомони ю п, а 57, те.чежки 49 и упора 51 перемещают нластину 4 в крайнее правое положепне. При
Q этом то;|катели 3 ге. к жки 2 попеременно меняют свое кхпожение, т. е. пак,:1опные принимают вер1икальное положение (шхюжение погрузки), вертика.чьные - наклонное положение (нерабочее).
5 Затем грузопод ьемный борт 10 с помощыо грузонодт емноЕо устройства онускают и ус ганавливаю ролика.ми 32 и 33 рыча1 ои 24 и 26 на поверхность 48 (или площадк ). П|)и этом рычаги 24-26 с помощью про- дольньгх гидроцилиндров 36 установлены в крайнем наклонном положении (фиг. 7). После этого борт 10 с помощью транспортного средства подкатывают под стоя- Н1ий на опорной новер.хности 48 (плон1ад- ке) поддон 6 до соприкосн(лзения го|)цовой
5 часги стоек 21 с направляющими 65 борга 10 и за счет продо.чьных гндроцилиндров 36 (на11рав ление Б, фи| . 7), рычагов 24 26 и роликов 23 поднимают поддон 6 с опорной поверхностью 48 (фиг. 6 и 7).
Затем грузоподъемный борт К) с усганов
0 ленным на нем поддоном б с помощыо грузо- подьемного устройства поднимают до ня грузовой платформы 1 транспо1)Т110го средства. После чего в действие приводится гидроцилиндр 8, с помощью которого тележка 2 перемеп1ается в крайнее левое поло
5 женне и толкате,1ем 3 (со стороны борта 10), установленным с помонхью пластн- ны 14 в положение погрузки, «захватывает fia борту 10 поддон 6. Затем с помощью гидроцилипдра 8, тележки 2 и то,1кате,;1и 3 нодд(1Н 6 перемещается с борта 10 на грузовую платформу 1 транснортного средст ва.
0
Для повторения процесса погрчзки все
онерации повторяются аналогично оннсан45 ным, начиная с опускания грузоподъемного
борта 10 на опорную поверхность 48.
Формула изобретения
1. Транспортное средство д, 1я перевозки 50 г|)узов, содержап1ее грузоподъемный борг, смонтированный на кузове с возможностью вертикального перемещения, паправ,чяюни1е для взаимодействия с грузом, смонтированные в кузове и на борте, и приводньк- толкатели, уставювленные в кузове, тличаю55
щееся тем, что, с целью повышения эффективности вьпюлнення погрузочно-раз1 р - зочных работ, грузопод1,емный борт снабжен приводными двугттечими рычагами, закрепленными своей средней частью на борте с возможностью поворота в вертикальной плоскости, параллельной направляюп1,им, и иарни)по связанными между собой шарнир ными тягами, направляюш,ие борта выполнены в виде роликов, смонтированных на одних плечах рычагов, а на других плечах рычагов смонтированы ролики для взаимодействия с опорной поверхностью.
2. Трапспортное средство по п. 1, отличающееся тем, что направляющие кузова выполнены в виде рольгангов.
3. Транспортное средство по п. 1, отличающееся тем, что толкатель включает в себя тележку и подпружиненные поворотные упоры, смонтированные на тележке с возможностью фиксации в вертикальном положении при помощи приводной пластины, фи- чем привод перемещения пластины выполнен в виде дополнительной тележки с упорами, взаимодействующими с пластиной, один из которых установлен с возможностью перемещения в вертикальной плоскости относительно дополнительной тележки, а другой выполнен неподвижным.
| название | год | авторы | номер документа |
|---|---|---|---|
| Транспортное средство для перевозки грузов | 1988 |
|
SU1579806A2 |
| Кузов транспортного средства для перевозки легковесных грузов | 1982 |
|
SU1058809A1 |
| Транспортное средство с грузоподъемным устройством | 1985 |
|
SU1293931A1 |
| Транспортное средство | 1986 |
|
SU1373600A1 |
| Транспортное средство для перевозки легковесных сельскохозяйственных грузов | 1986 |
|
SU1379155A1 |
| Прицеп для транспортного средства | 2016 |
|
RU2624766C1 |
| Вагонопогрузочная машина | 1990 |
|
SU1791308A1 |
| Транспортное средство для перевозки баллонов со сжиженным газом | 1989 |
|
SU1731663A1 |
| Самосвальное транспортное средство | 1977 |
|
SU827336A1 |
| Транспортное средство для перевозки крупногабаритных грузов | 1986 |
|
SU1331692A1 |
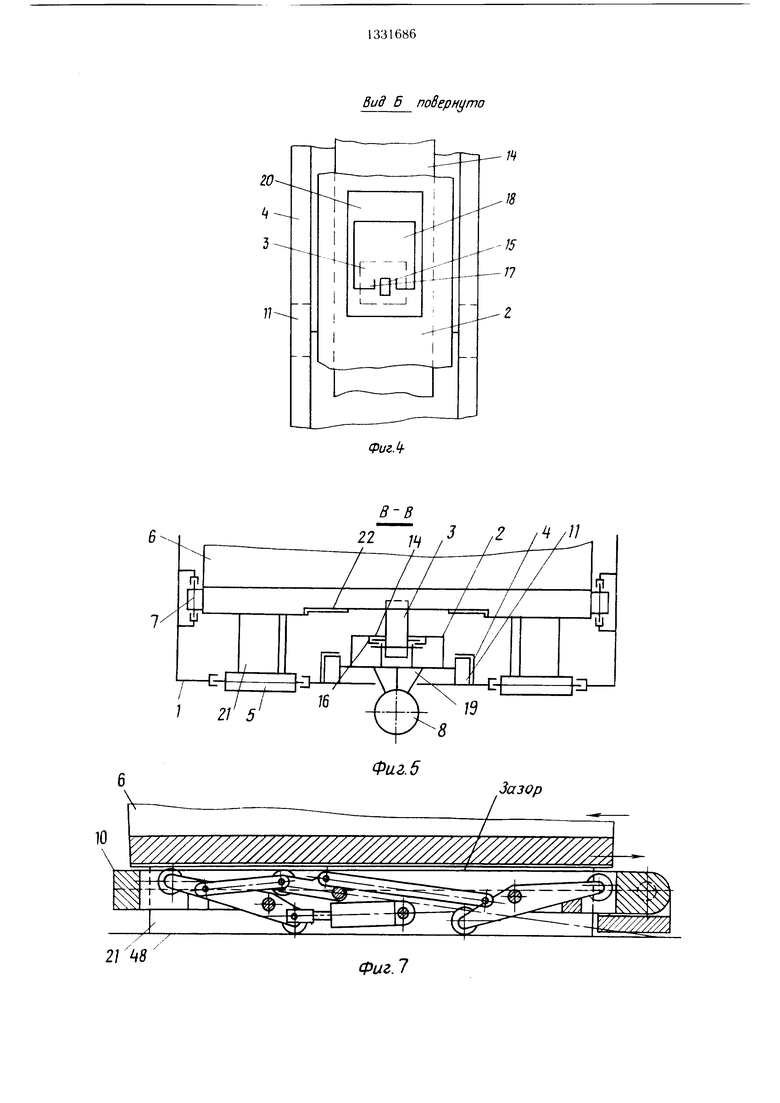
Изобретение относится к автомобильному транспорту для перевозки пакетированных грузов, например кирпичей на поддонах. При этом погрузка и выгрузка грузов осуществляется при помощи грузоподъемного борта. Цель изобретения - 11овын1ение эффективности вынолнения погрузочно-раз- грузочных работ. Устройство содержит кузов 6, снабженный рычагами 21 для перемен1ении по рольгангам г| )узовой платформы и направляющие 22 кузова для роликов 23 ры- 4ar(jH 24-26 грузоподъемного борта 10. Рычаги 24-26 установлены на осях 27- 29. смонтированных на борту 10, и щарнир- но связанных между собой при помощи тяг 30 и 31. Рычаги 24 и 26 снабжены роликами 32 и 33. При этом рычаг 24 щарнир- но связан со скобой 34 щтока 35 продольного гидропилиндра 36, корпус которого щар- нирно соединен с бортом 10 при номоп и оси 37. Для удержания рычагов 24-26 в наклонном положении борт 10 снабжен упорами 38 и 39 рычагов 24 и 26. Грузоподъемный борт 10 и арнирно смонтирован на раме 40 грузоподъемного устройства транспортного средства с помощью осей 41 и может быть установлен на опорную поверхность 48. Для фиксирования кузова 6 предусмотрены пло- П1адки 65. 2 з.п.ф-лы. 12 ил. to (Л 2 23 30 3 55 36 28 37 (Риг.6 СО СО о СХ) Oi Цй 1 33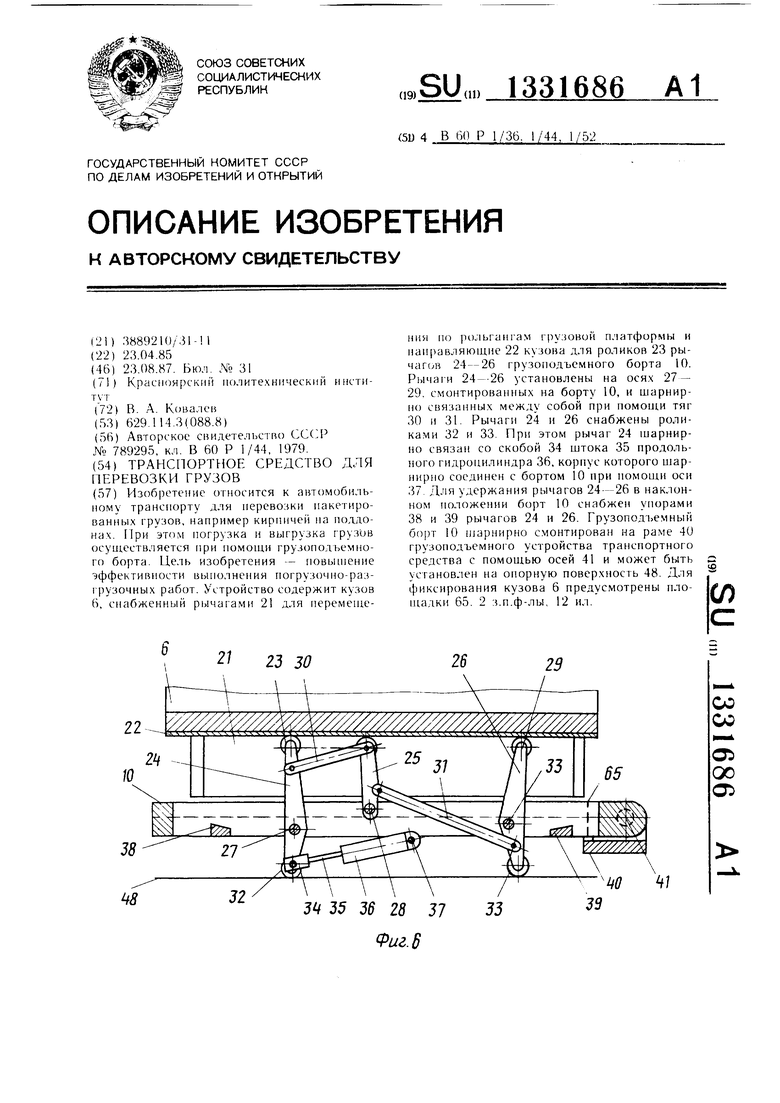
А-А
:5 7 /V
.
Фиг 2
Фиг.}
20 3
П
Вид Б повернуто
-и
18
15 -11
- ./5/
5
Зазор
Фиг. 7
JO 2J 12 31 46 41, 5
J
Л
32 7 V2
we. 7 47
1 4 3 2
2;
Фаг. 9
Г
Фиг.Ю
57 82
Л-Л
54
VLLZ.11
9LL2.12
| 3889210/31- 1 23.04.85 23.08.87 | |||
| Бюл | |||
| Способ очистки нефти и нефтяных продуктов и уничтожения их флюоресценции | 1921 |
|
SU31A1 |
| .Л | |||
| МАШИНА ДЛЯ ПЕРЕРАБОТКИ ТОРФЯНОЙ МАССЫ | 1923 |
|
SU629A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
