шение надежности в работе. При повороте руки робота-манипулятора рука воздействует на каретку и перемещает ее, расстягивая пружину. Нижний зуб кассеты взаимодействует с верхним упором каретки и- удерживает кассету с заготовками от перемещения в вертикальном направлении. При выходе руки из взаимодействия с кареткой по1
Изобретение относится к обработке металлов давлением и может быть Использовано для отделения штучной заготовки от стопы и подачи ее в зону обработки.
Целью изобретения является повышение надежности работы.
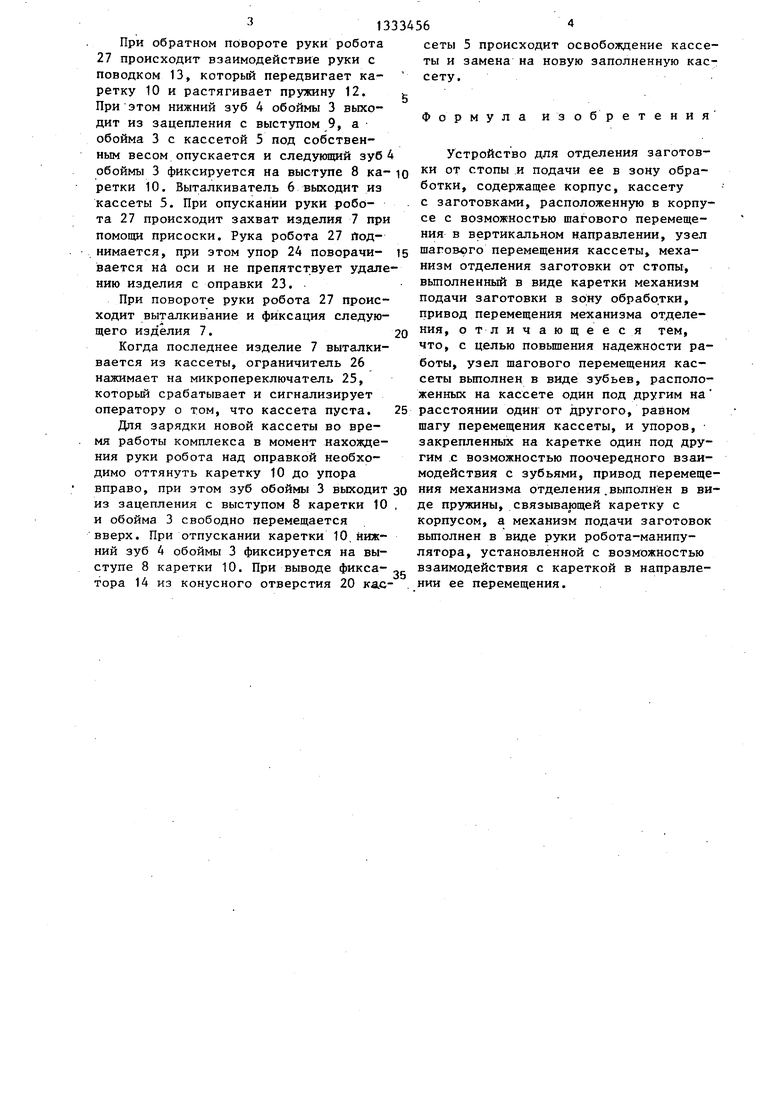
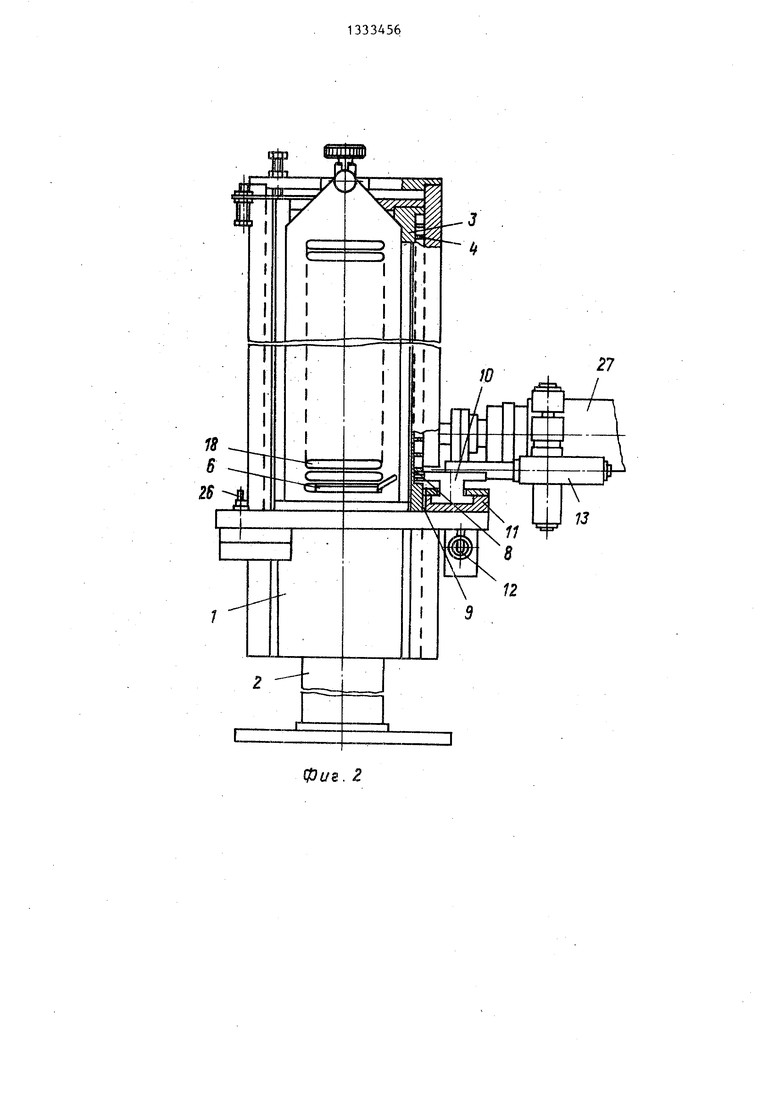
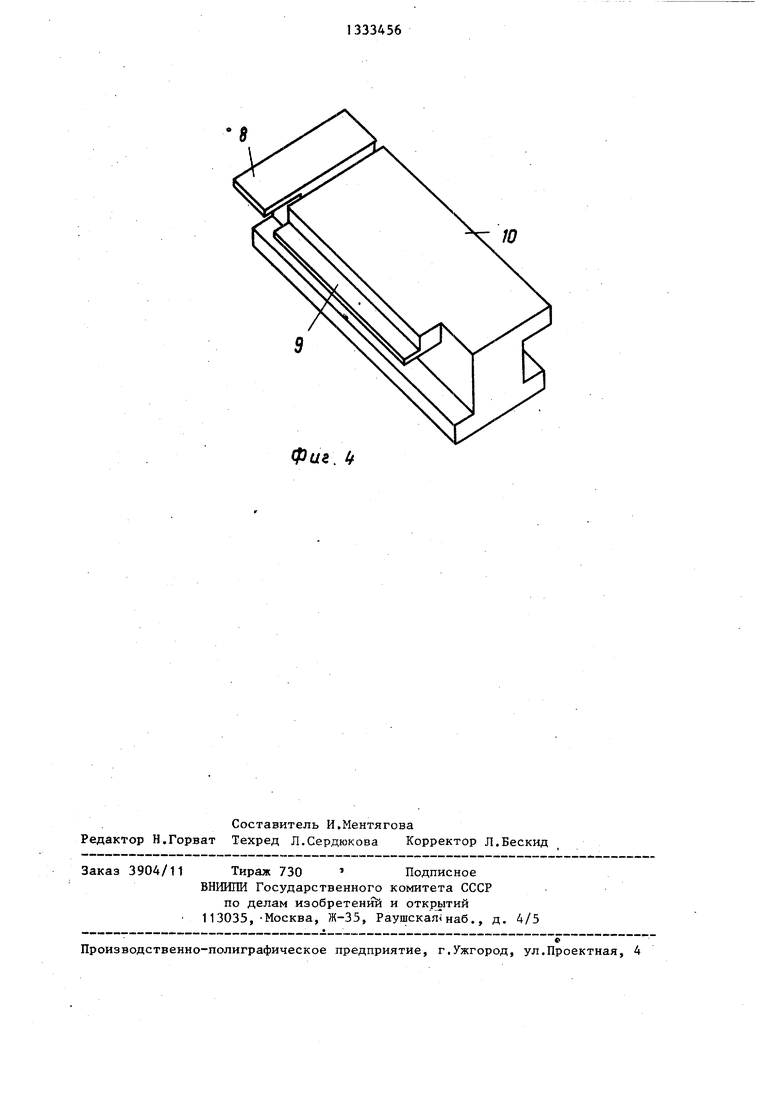
На фиг. 1 изображено устройство для отделения заготовки от стопы и подачи ее в зону обработки; на фиг.2 вид А на фиг. 1; на фиг. 3 - устройство, вид в плане; на фиг. 4 - каретка.
Устройство содержит корпус 1, стойку 2, обойму 3 с зубьями 4 с шагом, равным шагу подачи кассеты 5 под выталкиватель 6 заготовки 7, упоры, выполненные в виде выступов 8 и 9, выполненные в каретке 10, установленной в направляющих 11, пружину 12 и поводок 13.
Сменная кассета 5. с изделиями 7 установлена внутри обоймы 3 и крепится подпружиненным коническим фиксатором 14. Кассета 5 состоит из двух щечек 15 с пазами 16, шаг которых равен шагу зубьев 4 обоймы 3 и в которые устанавливаются изделия 7. Задняя стенка 17 кассеты 5 удерживает изделия 7 от выпадания и имеет овальные окна 18 с шагом, равным шагу пазов 16 для свободного прохода выталкивателя 6. Верхняя стенка 19 кассеты 5 имеет конусное отверстие 2 для фиксации кассеты 5 в обойме 3. В вертикальной плите 21 корпуса 1 имеется окно для выхода изделия из кассеты.
На горизонтальной плите 22 корпуса установлена оправка 23 для ориентации и фиксации изделия 7. Упор 24
следняя под действием пружины перемещается в направлении к кассете и выталкивает заготовку из кассеты. Верхний упор выходит из взаимодействия с нижним зубом. Кассета под дейртви- ем собственного веса опускается до взаимодействия нижним зубом с другим упором каретки. 4 ил.
имеет ось вращения и служит для ограничения хода изделия из кассеты 5 и не препятствует удалению изделия с. оправки 23.
Для сигнализации оператору о том, что кассета пуста, под плитой 22 установлен микропереключатель 25, взаимодействующий с ограничителем 26; 27 - рука робота-манипулятора.
Устройство работает следующим образом.
В исходном состоянии рука робота 27 расположена над оправкой 23 и взаимодействует с поводком 13 каретки 10, которая находится в крайнем правом положении, а пружина 12 растянута. Обойма 3 с кассетой 5 и изделиями 7 находится в крайнем верхнем положении, при этом нижний зуб 4
обоймы 3 фиксируется на выступе 8 каретки 10, а выталкиватель 6 расположен вне пределов кассеты.
При повороте руки робота 27 пружиной 12 перемещается каретка 10,
при этом обойма 3 с кассетой 5 и изделиями 7 под собственным весом опускается и фиксируется на выступе 9 тем же зубом 4. При дальнейшем ходе каретки 10 выталкиватель 6,.закрепленный на каретке 10, входит в нижнее овальное окно 18 задней стенки 17 кассеты 5 и выталкивает изделие 7 через окно вертикальной плиты 21 из кассеты 5.
Изделие, передвигаясь в сторону оправки 23, под действием выталкивателя 6 доходит до упора 24 и фиксируется на оправке 23. При этом боковые ограничители ориентируют изделие 7
в пространстве, а планка позволяет завести изделие на оправку 23.
При обратном повороте руки робота 27 происходит взаимодействие руки с поводком 13, которьй передвигает каретку 10 и растягивает пружину 12. При этом нижний зуб 4 обоймы 3 выходит из зацепления с выступом 9, а обойма 3 с кассетой 5 под собственным весом опускается и следующий зуб обоймы 3 фиксируется на выступе 8 ка- ретки 10. Выталкиватель 6 выходит из кассеты 5. При опускании руки робота 27 происходит захват изделия 7 при помощи присоски. Рука робота 27 Поднимается, при этом упор 24 позорами- вается нА оси и не препятствует удалению изделия с оправки 23.
При повороте руки робота 27 происходит выталкивание и фиксация следующего изделия 7.
Когда последнее изделие 7 выталкивается из кассеты, ограничитель 26 нажимает на микропереключатель 25, который срабатывает и сигнализирует оператору о том, что кассета пуста.
Для зарядки новой кассеты во время работы комплекса в момент нахождения руки робота над оправкой необходимо оттянуть каретку 10 до упора вправо, при этом зуб обоймы 3 выходит из зацепления с выступом 8 каретки 10 и обойма 3 свободно перемещается вверх. При отпускании каретки 10,нижний зуб 4 обоймы 3 фиксируется на выступе 8 каретки 10. При выводе фикса
тора 14 из конусного отверстия 20 касt5
0
5
о
5
сеты 5 происходит освобождение кассеты и замена на новую заполненную кассету.
Формула изобретения
Устройство для отделения заготовки от стопы и подачи ее в зону обработки, содержащее корпус, кассету с заготовками, расположенную в корпусе с возможностью шагового перемещения в вертикальном направлении, узел шагового перемещения кассеты, механизм отделения заготовки от стопы, выполненный в виде каретки механизм подачи заготовки в зону обработки, привод перемещения механизма отделения, отличающееся тем, что, с целью повьш1ения надежности работы, узел шагового перемещения кассеты вьтолнен в виде зубьев, расположенных на кассете один под другим на расстоянии один от другого, равном шагу перемещения кассеты, и упоров, закрепленных на каретке один под другим с возможностью поочередного взаимодействия с зубьями, привод перемещения механизма отделения.выполнен в виде пружины, связывающей каретку с корпусом, а механизм подачи заготовок выполнен в виде руки робота-манипулятора, установленной с возможностью взаимодействия с кареткой в направлении ее перемещения.
21
фиг. Z
22
7
фиг.З
ю
Фи. tt
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированный комплекс для штамповки | 1985 |
|
SU1291253A1 |
| РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ МНОГОПЕРЕХОДНОЙ ШТАМПОВКИ | 1993 |
|
RU2082527C1 |
| Устройство для шаговой подачи стопы заготовок | 1984 |
|
SU1194544A1 |
| Способ подачи полосового материала к прессу и устройство для его осуществления | 1985 |
|
SU1279719A1 |
| Устройство для отделения верхней заготовки от стопы и подачи ее в зону обработки | 1986 |
|
SU1524959A1 |
| Устройство для отделения верхней заготовки от стопы и подачи ее в ориентированном положении | 1987 |
|
SU1454550A1 |
| Устройство для измерения толщины покрытия катода цветного кинескопа | 1989 |
|
SU1711257A1 |
| Автоматизированный комплекс для листовой штамповки заготовок с внутренним асимметричным контуром | 1984 |
|
SU1253699A1 |
| Устройство для подачи листа в зону обработки | 1985 |
|
SU1357108A1 |
| Устройство Кривовязюка для вырубки заготовок из плоского материала | 1980 |
|
SU927385A1 |
Изобретение относится к обработке металлов давлением и может быть использовано для отделения заготовки от стопы и подачи ее в зону обработки. Целью изобретения является повы27 S (Л 00 00 00 4 СП О) фие. 1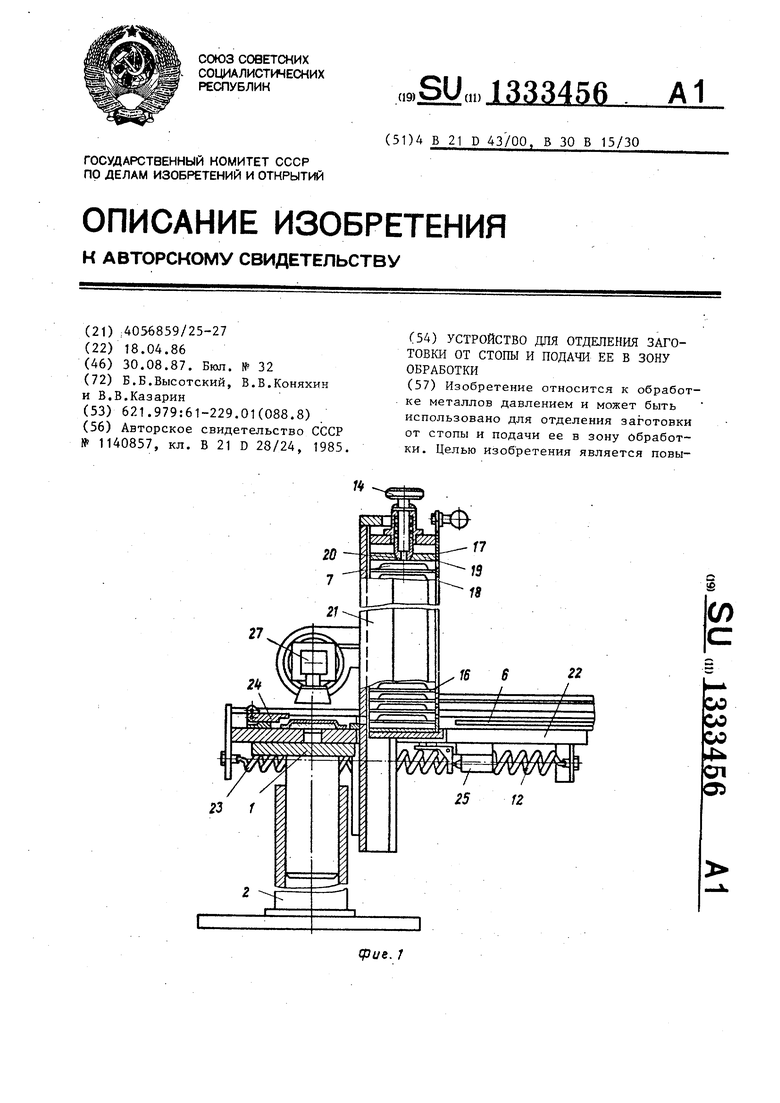
| Устройство для вырубки интегральных схем и укладки их в спутники | 1983 |
|
SU1140857A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
