1
Изобретение относится к машиностроению и может быть использовано для автоматического ориентирования и поштучной выдачи на позицию захвата- промвзшшенного робота плоских деталей со сложным контуром.
Цель изобретения - расширение функциональных возможностей устройст13335322
ки имеют сквоз1 ые отверстия, по форме совпадаюище с контуром заготовки, а высоты этих вкладышей кратны высоте заготовки. Над окном 17 выгрузки отсутствует аналогичный захват в поворотном диске 10. В диске 21 поворотного устройства 7 установлены неметаллические вкладьгши 22 с гнездом
ной высоте заготовки. Контуры гнёзда вкладыша 22 и отверстия окна I7 выгрузки совпадают.
на за счет обеспечения автоматическо- ю форме заготовки и глубиной, равг го ориентирования и поштучной вьща- чи плоских деталер со сложным контуром.
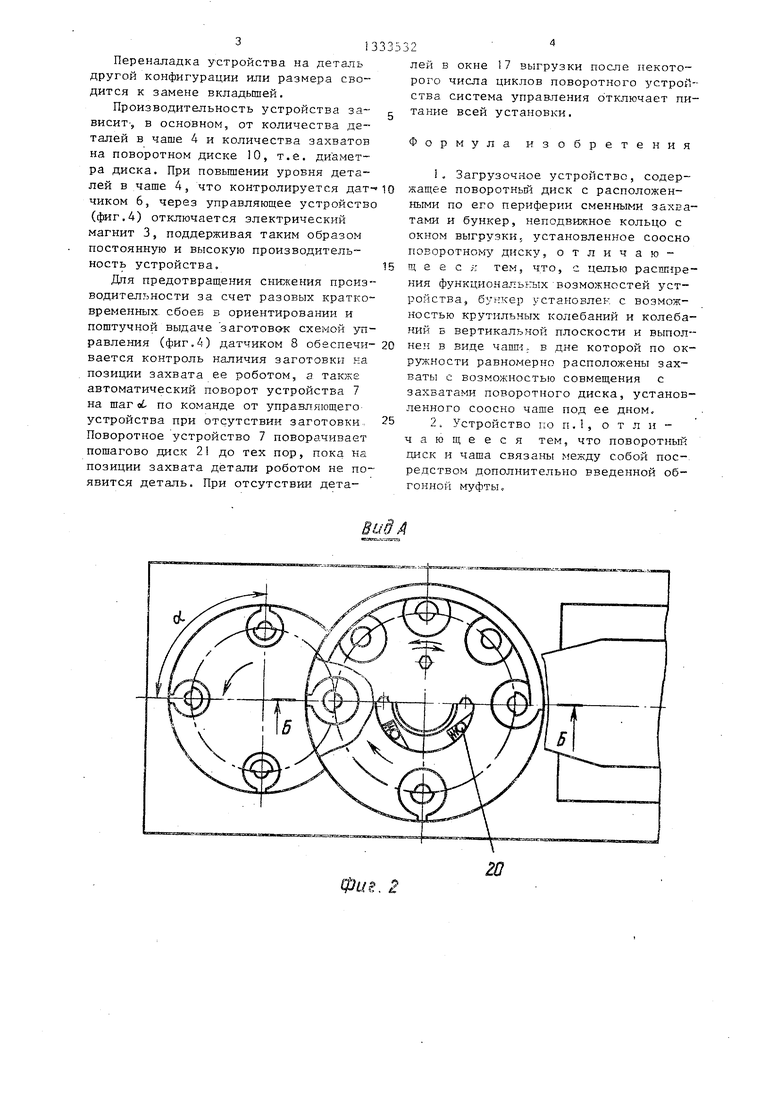
На фиг.1 изображено загрузочное устройство; на фиг.2 - вид А на фиг.1; на фиг.3 - разрез Б-Б на фиг.2; на фиг.4 - структурная схема управления устройством.
Загрузочное устройство содержит
15
Устройство работает следуюш 1м образом.
Из бункера 1 по вибролотку 2 заготовки поступают в чашу 4, Бибропри- вод 9 задает колебательные движения загрузочный блок, состоящий из бунке- 20 поворотному диску 10: крутильное и ра 1 , вибролотка 2 и электромагнита вертикальное (как указано стрелками 3, установленный над чашей 4. На на фиг.З) с частотой около 50 Гц в стойке 5 неподвижно закреплен бесконтактный датчик 6 таким образом, что его рабочий торец обращен внутрь ча- 2-5 ши 4,
. Под чашей 4 установлено поворотное устройство 7 таким образом, что зазор & Ъ. между дисками меньше толщи- ны заготовки. На поворотном устройст-30 от захвата 11 к захвату 19, западают ве 7 рабочим торцом вверх пЬд позици- в них при совпгщении контуров., При
постоянном режиме.
Заготовки под действием вибрации совершают хаотлчное движение по окружности вдоль кольца 12 по поверхности поворотного диска 10. В процессе движения заготовки постоянно меняют свое положение и, перемещаясь
ей съема заготовки роботом неподвижно установлен бесконтактный датчик 8. Б качестве привода чаши 4 использован универсальный с независимым возбуждением вертикальных и горизонтальных колебаний вибропривод 9.
К выходному фланцу вибропривода 9 жестко крепится поворотный диск 10 чаши 4 с расположенными в нем захватами 1 1 в виде сменных вкладьш1ей. Сменные вкладыши имеют CKBO3iib e отверстия, совпадающие по форме с контуром ориентируемой заготовки. К поворотному диску 10 крепится кольцо 12. Бибропривод 9 установлен на общей плите 13 устройства. На этой же плите 13 установлены стойки 14, на которых с помощью болтов 15 жестко закреплено неподвижное кольцо 16 так, чтобы зазорAhj был меньше толщины заготовки. Б неподвижном кольце 16 имеется одно окно 17 выгрузки, а на поверхности неподвижного кольца 16 расположен поворотный диск 18 с захватами 19. Диски 10 и 18 связаны друг с другом при помощи подпружиненных роликов 20, образуя обгонную муфту. Захваты 11 и 19 и окно 17 выгрузной высоте заготовки. Контуры гнёзда вкладыша 22 и отверстия окна I7 выгрузки совпадают.
форме заготовки и глубиной, равг
Из бункера 1 по вибролотку 2 заготовки поступают в чашу 4, Бибропри- вод 9 задает колебательные движения поворотному диску 10: крутильное и вертикальное (как указано стрелками на фиг.З) с частотой около 50 Гц в
от захвата 11 к захвату 19, западают в них при совпгщении контуров., При
постоянном режиме.
Заготовки под действием вибрации совершают хаотлчное движение по окружности вдоль кольца 12 по поверхности поворотного диска 10. В процессе движения заготовки постоянно меняют свое положение и, перемещаясь
5
достаточно большой амплитуде горизонтальных колебаний происходит эффект выбрасывания неправильно сориентированной заготовки. Заготовки, попавшие в отверстия захватов 11, ложатся на поверхность поворотного диска 18, который через ролики 20 воспринимает вращение только в одном
0 направлении (указано стрелкой на фиг.2) от колебательного движения поворотного диска 10. При вращении поворотного диска 18 захваты II и 19 совмещаются и сориентированные заготовки попадают в захваты 19, двигаясь вместе с ними по поверхности неподвижного кольца 16. Таким .образом поворотный диск 18 транспортирует заготовки, сохраняя их ориентацию к окну 17 выгрузки. Западая в отверстие окна 17 выгрузки, заготовки образуют стопку (кассету), не теряя ориентации, причем нижняя заготовка ложится сразу в гнездо вкладьша 22.
5 Поворотное устройство 7 поворачивает диск 21 пошагово на угол« - , вынося сориентированные заготовки поштучно на позицию захвата их роботом (фиг,2).
5
0
313
Переналадка устройства на деталь другой конфигурации или размера сводится к замене вкладьппей.
Производительность устройства за- висит-, в основном, от количества деталей в чаше 4 и количества захватов на поворотном диске 10, т.е. диаметра диска. При повышении уровня деталей в чаше 4, что контролируется дат- чином 6, через управляющее устройство (фиг.4) отключается электрический магнит 3, поддерживая таким образом постоянную и высокую производительность устройства.
Для предотвращения снизкения производительности за счет разовых кратковременных, сбоев в ориентировании и поштучной выдаче заготовок схемой управления (фиг.4) датчиком 8 обеспечи- 20 не;-: в виде в дне которой по ок- вается контроль наличия заготовки ка позиции захвата ее роботом, а также автоматический поворот устройства 7 на шаг об по команде от управляющего устройства при отсутствии заготовки, Поворотное устройство 7 поворачивает пошагово диск 21 до тех пор, пока на позиции захвата детали роботом не появится деталь. При отсутствии дета25
ружности равномерно расположены захваты с возможностью совмещения с захватами поворотного диска, установленного соосно чаше под ее дном,
2. Устройство по п.1, отличающееся тем, что поворотньй диск и чаша связаны между собой нос-, редством дополнительно введенной обгонной муфты
лей в окне 17 выгрузки после некоторого числа циклов поворотного устройства система управления отключает питание всей установки.
Формула изобретения
i. Загрузочное устройство, содержащее поворотньй диск с расположен- ньти по его периферии сменными захватами и бункер, неподвижное кольцо с окном выгрузки, установленное соосно поворотному диску, отличающее с я тем, что, с целью pacnnjpe- ния функциональггых возможностей устройства, бункер установлен с возможностью крутильных колебаний и колебаний Б вертикальной плоскости и выполне;-: в виде в дне которой по ок-
ружности равномерно расположены захваты с возможностью совмещения с захватами поворотного диска, установленного соосно чаше под ее дном,
2. Устройство по п.1, отличающееся тем, что поворотньй диск и чаша связаны между собой нос-, редством дополнительно введенной обгонной муфты
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для поштучной выдачи заготовок | 1987 |
|
SU1456271A1 |
| Устройство для поштучной выдачи заготовок | 1986 |
|
SU1324728A1 |
| Устройство для поштучной выдачи деталей | 1985 |
|
SU1276477A1 |
| Робототехнологический комплекс | 1988 |
|
SU1616802A1 |
| Бункерное загрузочное устройство | 1976 |
|
SU610657A1 |
| Устройство для поштучной выдачи плоских заготовок из бункера | 1980 |
|
SU948498A1 |
| Роторный автомат питания | 1983 |
|
SU1093475A1 |
| Агрегат для брикетирования штучных изделий | 1976 |
|
SU653136A1 |
| Бункерное ориентирующее устройство | 1982 |
|
SU1027012A1 |
| Автомат для отгибки зацепов пружин растяжения | 1989 |
|
SU1641491A1 |

Изобретение относится к машиностроению и может быть использовано для автоматического ориентирования и йоштучной выдачи на позицию захвата промьшшенного робота плоских деталей со сложным контуром. Цель изобретения - расширение функциональных возможностей устройства. Заготовки загружают в бункер I, откуда они по вибролотку 2 поступают в чашу 4. Под воздействием вибропривода заготовки совершают хаотичное движение по чаше 4 и, перемещаясь по ее по- . верхности, попадают в захваты, вьтол- ненные в чаше 4 и совпащающие по форме с формой заготовки. Заготовки, попавшие в захваты, проваливаются на поворотный диск, расположенный под чашей. При вращении поворотного диска заготовки транспортируются к окну выдачи, установленному на поворотном устройстве 7, где образуют стопку за готовок, переносимую пошагово поворотным устройством 7 на позицию захвата их роботом. 1 з.п. ф-лы, 5 ил. - а (Л П, 00 со 00 ел фиг. f
Фи,. 2
Заказ 3910/15
Тираж 785Подписное
БНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, }К-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. У кгород, ул. Проектная, 4
| Бункерное ориентирующее устройство | 1982 |
|
SU1027012A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
