многоярусные поддоны для укладки на них деталей. Для подачи деталей 9 в зону загрузки под поворотным столом установлены механизм шагового подъема заготовок из магазина для
1
Изобретение относится к машино- строению и может быть использовано в. загрузочных устройствах для подачи заготовок на оборудование с помощью роботов и манипуляторов.
Целью изобретения является повышение производительности устройства путем обеспечения бесперебойной загрузки его.
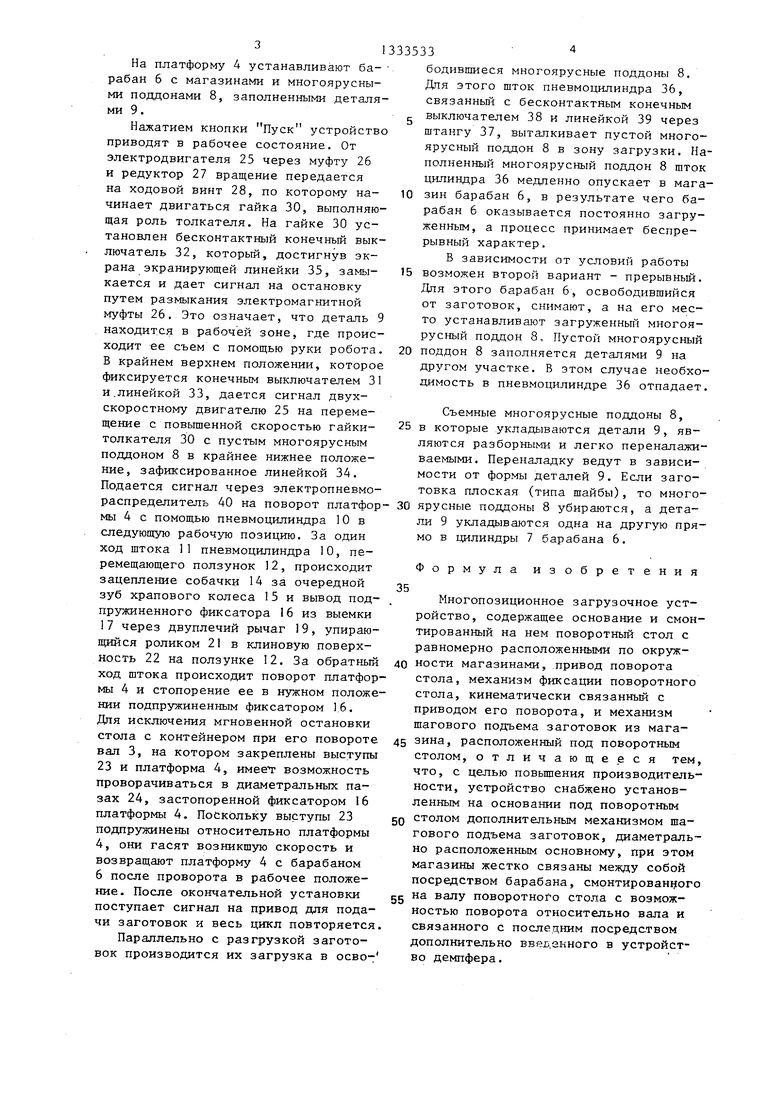
На фиг.1 изображено многопозиционное загрузочное устройство, общий вид; на фиг.2 - вид А на фиг.1; на фиг.,3 - вид Б на фиг.1; на фиг.4 - узел I на фиг.1; на фиг.5 - разрез Г-Г на фиг.1; на фиг.6 - узел II на фиг.о
Многопозицианное загрузочное устройство содержит основание и смон- тированньй на нем поворотный стол, выполненный в виде подшипникового узла 2 с валом 3, закрепленного на основании.1. На валу закреплена платформа А и диск 5. На платформу 4 устанавливается барабан 6 с возможностью поворота относительно вала 3. На барабане 6 жестко закреплены магазины, выполненные в виде цилиндров 7, равномерно расположенные по окружности барабана 6. В каждый магазин установлен многоярусный поддон 8 для размещения в нем поштучно деталей 9. Привод поворота поворотного стола выполнен в виде пневмоцилиндра 10, шток 11 которого соединен с.ползунком 12, на котором закреплена через пружину 13 собачка 14, входящая в зацепление с храповым колесом 15, закрепленным на диске 5, Механизм фиксации поворотного стола выполнен в виде подпружиненного фиксатора 16, смонтированного на основании 1 с возможностью взаимодействия одним онцом с выемками 17f выполненными на боковой поверхности диска.5, а вторым концом шарнирно соединен с плечом 18 двуплечего рычага 19, установленного на основании, на втором плече 20 котоподачи детален к манипулятору и дополнительный механизм шагового подъема для загрузки многоярусных поддонов после выгрузки из них деталей.. 6 ил.
5
0
5
0
5
0
5
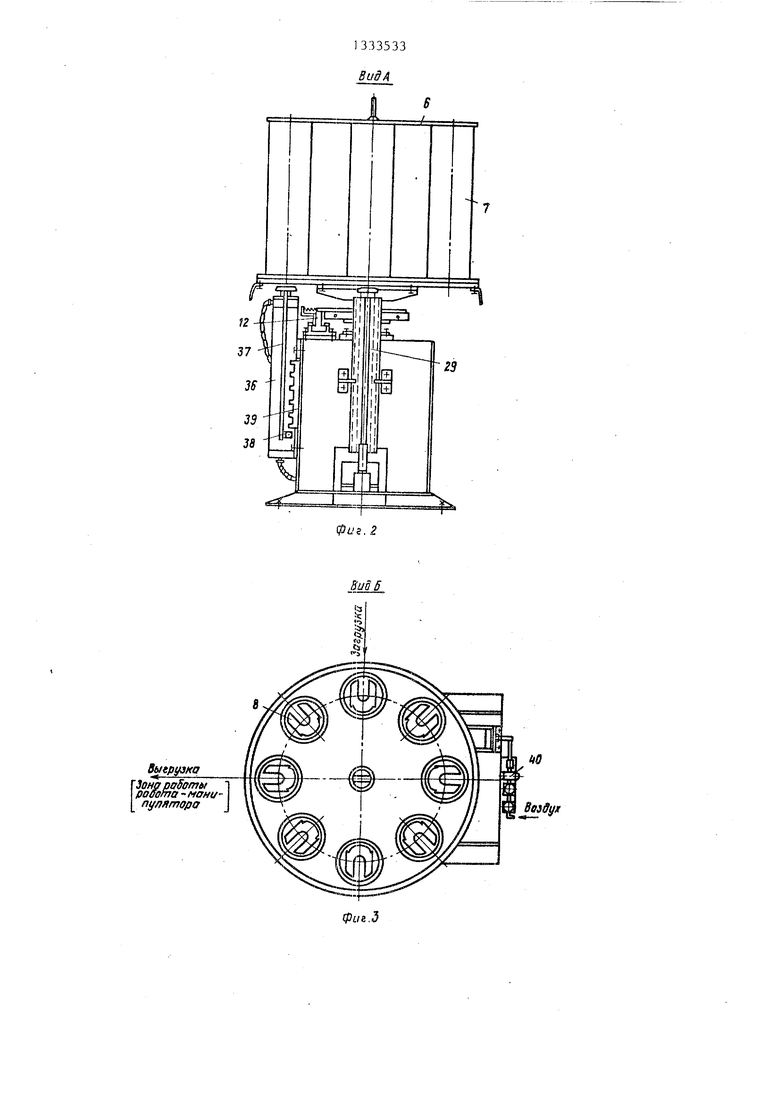
рого закреплен ролик 21 с возможностью взаимодействия с клиновой поверхностью 22, выполненной на ползунке 12. Поворот платформы 4 относительно вала 3 поворотного стола осуществляется посредством демпфера, выполненного в виде выступов 23, выполненных на валу 3 поворотного стола и подпр ужиненных относительно платформы 4.
Выступы 23 вала 3 установлены в диаметральных пазах 24, выполненных в платформе 4, на которой установлен барабан с магазинами. Механизм шагового подъема заготовок в магазинах содержит привод, смонтированный на основании под платформой 4, включающий двухскоростной двигатель 25, электромагнитную муфту 26 и редуктор 27, на тихоходном валу которого насажен винт 28. По винту 28 в трубе 29, прикрепленной к основанию 1 и имеющей пазы, двигается гайка 30 с установленными на ней конечными выключателями 31 и 32, которые срабатывают посредством линеек 33, 34 и 35. Для выполнения вспомогательных работ при загрузке освободившихся многоярусных по.ццонов 8 на основании 1 установлен пневмоцилиндр 36, шток которого жестко соединен со штангой 37, на которой закреплен конечный выключатель 38, срабатывающий посредством линейки 39.
Очистку и регулировку давления воздуха, поступающего в рабочие полости пневмоцилиндров 10 и 36, осуществляет электрический пневморас- пределитель 40, работающий совместно с конечными вьжлючателями 31, 32 и 38 и промышленным роботом в единой замкнутой электроцепи, позволяющей работать устроз ству в автоматическом режиме.
Многопозиционное загрузочное устройство работает следующим образом.
На платформу 4 устанавливают ба- рабан 6 с магазинами и многоярусными поддонами 8, заполненными деталями 9 .
Нажатием кнопки Пуск устройство приводят в рабочее состояние. От электродвигателя 25 через муфту 26 и редуктор 27 вращение передается на ходовой винт 28, по которому начинает двигаться гайка 30, выполняющая роль толкателя. На гайке 30 установлен бесконтактный конечный выключатель 32, который, достигнув экрана экранирующей линейки 35, замыкается и дает сигнал на остановку путем размыкания электромагнитной муфты 26, Это означает, что деталь 9 находится в рабочей зоне, где происходит ее съем с помощью руки робота. В крайнем верхнем положении, которое фиксируется конечным выключателем 31 и,линейкой 33, дается сигнал двух- скоростному двигателю 25 на перемещение с повышенной скоростью гайки- толкателя 30 с пустым многоярусным поддоном 8 в крайнее нижнее положение, зафиксированное линейкой 34, Подается сигнал через электропневмораспределитель 40 на поворот платфор- 30 ярусные поддоны 8 убираются, а дета- мы 4 с помощью пневмоцилиндра 10 в следующую рабочую позицию. За один ход штока 11 пневмоцилиндра 10, перемещающего ползунок 12, происходит зацепление собачки 14 за очередной зуб храпового колеса 15 и вывод подпружиненного фиксатора 16 из выемки 7 через двуплечий рычаг 9, упирающийся роликом 21 в клиновую поверхность 22 на ползунке 12, За обратный ход штока происходит поворот платформы 4 и стопорение ее в нужном положении подпружиненным фиксатором 16, Для исключения мгновенной остановки стола с контейнером при его повороте вал 3, на котором закреплены выступы 23 и платформа 4, имеет- возможность проворачиваться в диаметральных пазах 24, застопоренной фиксатором 16 платформы 4. Поскольку выступы 23 подпружинены относительно платформы 4, они гасят возникшую скорость и возвращают платформу 4 с барабаном 6 после проворота в рабочее положение. После окончательной установки поступает сигнал на привод для подачи заготовок и весь цикл повторяется.
Параллельно с разгрузкой заготовок производится их загрузка в осволи 9 укладываются одна на другую прямо в цилиндры 7 барабана 6,
Формула изобретения
35
Многопозиционное загрузочное устройство, содержащее основание и смонтированный на нем поворотный стол с равномерно расположенными по окруж40 ности магазинами, привод поворота стола, механизм фиксации поворотного стола, кинематически связанный с приводом его поворота, и механизм шагового подъема заготовок из мага45 зина, расположенный под поворотным столом, отличающееся тем, что, с целью повьшения производительности, устройство снабжено установленным на основании под поворотным
5Q столом дополнительным механизмом шагового подъема заготовок, диаметрально расположенным основному, при этом магазины жестко связаны между собой посредством барабана, смонтирован1;гого
eg на валу поворотного стола с возможностью поворота относительно вала и связанного с последним посредством дополнительно введенного в устройство демпфера,
бодившиеся многоярусные поддоны 8, Для этого шток пневмоцилиндра 36, связанньм с бесконтактным конечным
выключателем 38 и линейкой 39 через штангу 37, выталкивает пустой многоярусный поддон 8 в зону загрузки. Наполненный многоярусный поддон 8 шток цилиндра 36 медленно опускает в магаЗИН барабан 6, в результате чего барабан 6 оказывается постоянно загруженным, а процесс принимает беспрерывный характер,
В зависимости от условий работы
возможен второй вариант - прерывный, Дпя этого барабан 6, освободившийся от заготовок, снимают, а на его место устанавливают загруженньш многоярусный поддон 8. Пустой многоярусный
поддон 8 заполняется деталями 9 на другом участке, В этом случае необходимость в пневмоцилиндре 36 отпадает.
Съемные многоярусные поддоны 8, в которые укладываются детали 9, являются разборными и легко переналаживаемыми. Переналадку ведут в зависимости от формы деталей 9, Если заготовка плоская (типа шайбы), то много30 ярусные поддоны 8 убираются, а дета-
ли 9 укладываются одна на другую прямо в цилиндры 7 барабана 6,
Формула изобретения
35
Многопозиционное загрузочное устройство, содержащее основание и смонтированный на нем поворотный стол с равномерно расположенными по окруж40 ности магазинами, привод поворота стола, механизм фиксации поворотного стола, кинематически связанный с приводом его поворота, и механизм шагового подъема заготовок из мага45 зина, расположенный под поворотным столом, отличающееся тем, что, с целью повьшения производительности, устройство снабжено установленным на основании под поворотным
5Q столом дополнительным механизмом шагового подъема заготовок, диаметрально расположенным основному, при этом магазины жестко связаны между собой посредством барабана, смонтирован1;гого
eg на валу поворотного стола с возможностью поворота относительно вала и связанного с последним посредством дополнительно введенного в устройство демпфера,
ВидА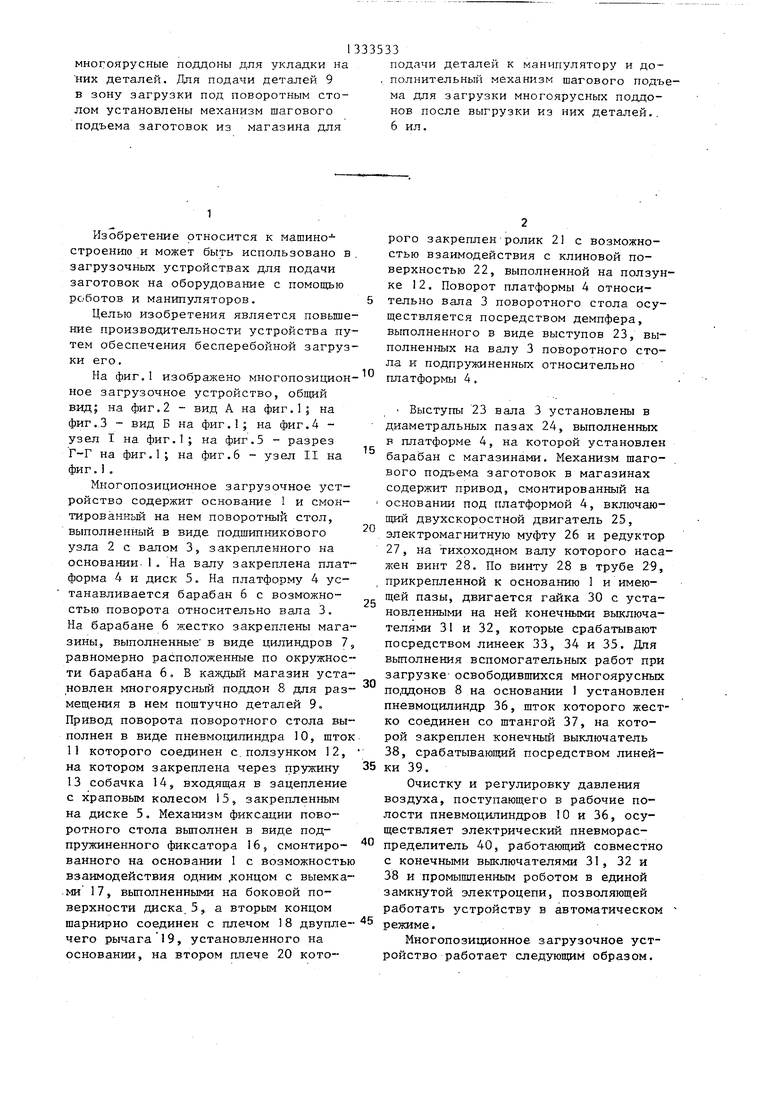
| название | год | авторы | номер документа |
|---|---|---|---|
| Многопозиционное загрузочное устройство | 1989 |
|
SU1705019A1 |
| РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ МНОГОПЕРЕХОДНОЙ ШТАМПОВКИ | 1993 |
|
RU2082527C1 |
| Робототехнический комплекс для штамповки деталей из штучных заготовок | 1987 |
|
SU1600895A1 |
| Магазинное устройство | 1985 |
|
SU1326376A1 |
| Загрузочное устройство к роботизированному комплексу | 1986 |
|
SU1470401A1 |
| Робототехнический комплекс | 1987 |
|
SU1416244A1 |
| Автоматизированный комплекс для листовой штамповки | 1979 |
|
SU774722A1 |
| ПОТОЧНАЯ ЛИНИЯ ДЛЯ ИЗГОТОВЛЕНИЯ СТРОИТЕЛЬНЫХ ИЗДЕЛИЙ | 1992 |
|
RU2016766C1 |
| Автоматическое загрузочное устройство | 1984 |
|
SU1220783A1 |
| Загрузочное устройство | 1985 |
|
SU1357190A1 |
Изобретение относится к машиностроению и может быть использовано в загрузочных устройствах для подачи заготовок на оборудование с помощью , роботов и манипуляторов. Целью изобретения является повышение производительности устройства. Для- этого в многопозиционном загрузочном устрой-, стве магазины вьтолнены в виде цилиндров, равномерно размещенных по периферии барабана 6, установленного на валу 3 платформы 4. Причем барабан 6 установлен с возможностью поворота относительно вала 3 и связан с последним посредством демпфера. В цилиндрах барабана 6 установлены (Л со 00 00 ел 00 00 9ut.1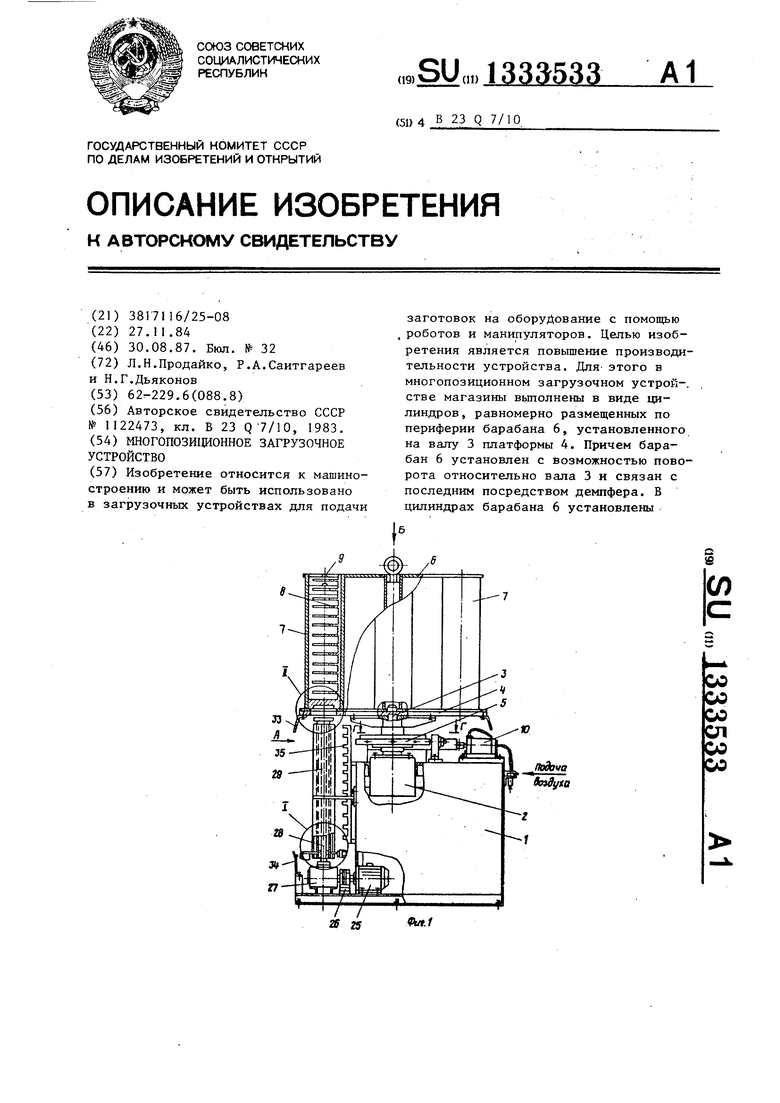
Выерузкд
f Зонд работы 1 pooorna-MOHU пулятора J
Ввздуя
3Z
ut.tf
ФУв.5
ж
Фиг. 6
Редактор Л.Повхан
Составитель И.Щивьев Техред М.Моргентал
Заказ 3910/15Тираж 785Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий П3035, Москва, Ж-35, Раушская наб., д. Д/5
Производственно-полиграфическое предприятие, г, Ужгород, ул. Проектная, 4
Корректор А.Тяско
| Многопозиционное загрузочное устройство | 1983 |
|
SU1122473A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
