1
Изобретение относится к цифровой вычислительной технике и может найти применение в специализированных вычислительных устройствах, используемых в системах автоматического управления .
Целью изобретения является расширение диапазона изменения аргумента„
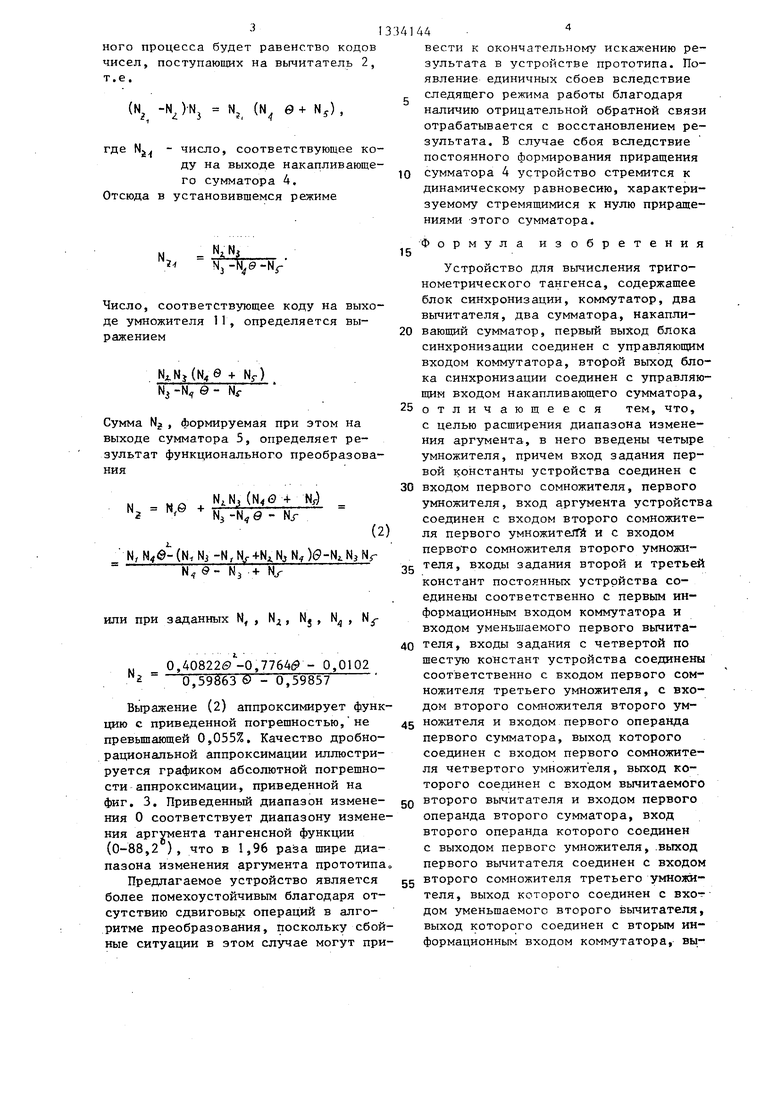
На фиго 1 изображена функциональ- ная схема устройства; на фиг. 2 схема блока синхронизации;на фиг. 3- график абсолютной погрешности аппроксимации .
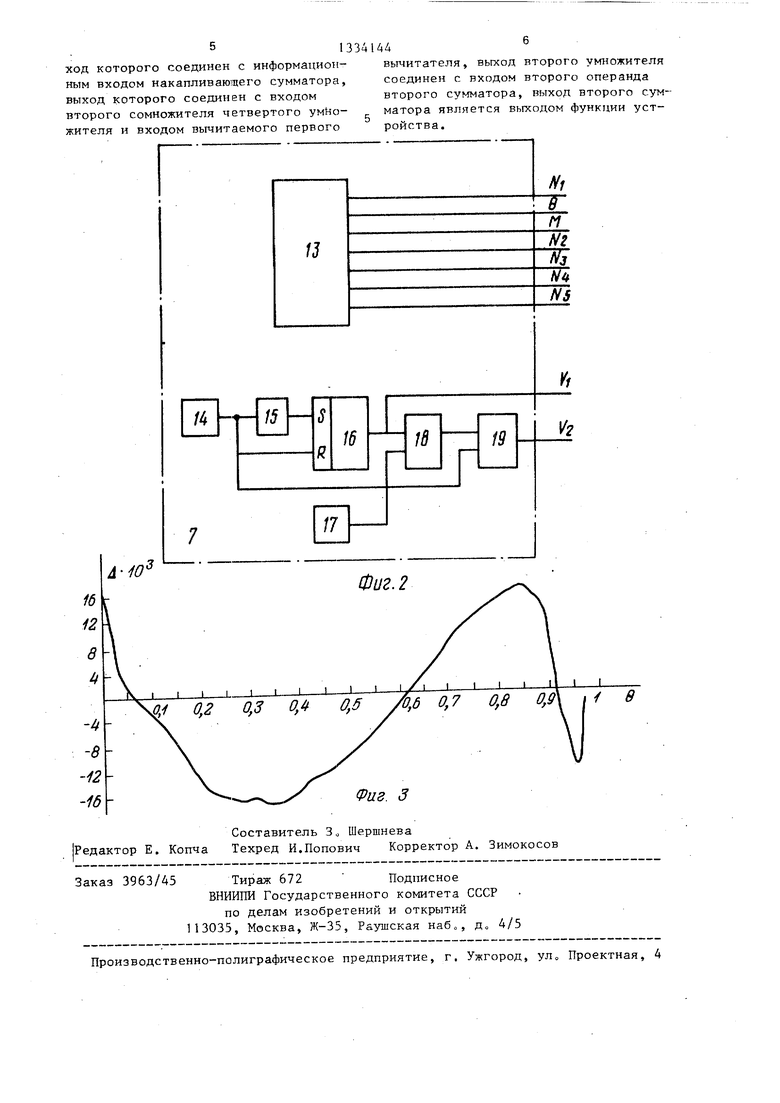
Предлагаемое устройство содержит вычитатели 1 и 2, сумматоры 3 и 4, накапливающий сумматор 5, коммутатор 6, блок 7 синхронизации, умножители 8-11 и выход 12 устройства.
Блок синхронизации (фиг. 2) содер- жит счетчик 13, датчик 14, элемент 15 задержки, триггер 16, генератор 17 импульсов, элементы И 18 иРШИ19о
Устройство работает следующим образом.
Пусть в начальный момент времени в сумматор 4, выполненный в виде накапливающего, занесен код числа М с девятого выхода блока 7 синхрониза- .циИо При этом импульс с датчика 14 сбрасывает триггер 16 и проходит, на выход элемента ИЛИ 19 и далее на управляющий записью вход сумматора 4, на входе которого присутствует код.числа М с выхода датчика 13 ко- дов, пропущенного коммутатором 6 разрешающим сигналом с выхода триггера- 16. Через время задержки элемента 15, не меньщее длительности импульса датчика 1.4 триггер 16 устанавлива- ется в единичное состояние, разрещаю щее прохождение на выход коммутатора 6 кода с выхода вьшитателя 2. Одно- временно на выход ;-шемента ИЛИ 19 начинают поступать сигналы генератор 17. С третьего выхода блока 7 синхронизации поступает код аргумента 9, изменяющийся в диапазоне 0; 0,98, а с выходов с четвер ;: ого по восьмой - кеды N , N , N3 , .N , .чисел 0,6819 0,99996; 0,61515; 0,59863; 0,016582 соответственно. Пусть число М равно нулю. Под воздействием сигналов с выхода блока синхронизации в сумматоре 4 накапливается ряд приращений, определяемых функционированием соот- ветствующих блоков,,
В основу работы устройства поло-жен принцип итерационного процесса
5
1
5
0
0 35 0 45 50 55
44
формирования тангенсной функции с помощью дробно-рациональной аппроксимации на основе автоматической компенсации задаваемых и вьфабатываемых в процессе работы данных, приводящей к установлению результата при равенстве сигналов цепей п рямой и обратной связи, благодаря чему появление единичных сбоев отрабатывается с восстановлением результата при расширенном диапазоне изменения аргумента.
После начальной установки на вход вычитаемого вычитателя 2 поступает код числа (M-NJ)NJ, сформированного на выходе умножителя 9. На вход умень- щаемого вычитателя 2 поступает код числа MN, где N N б + формируется умножителем 10 и сумматором 3. Таким образом, в сумматор 4 передается код суммы 4, и записывается по переднему фронту тактового импульса с второго выхода блока 7 синхронизации.
4,MN-(M-Nj)N3 M(N-N3)-f .
Во втором цикле итерационного процесса на сумматор 4 поступает код числа
(N-N3f +NiN3(N-N3)+M(N-N3) + fN N3 М (N-N ) (N-N +1) +N N/N-Nj +1)
и суммируется с его содержанием с приходом сигнала с блока 7 синхронизации, поступающего постоянно через равные промежутки времени, равные максимальному времени задержки формирования кода на входе сумматора 4, В третьем цикле итераций содержимое сумматора 4 суммируется с,кодом числаг
(N-Nj ) (N-Nj + l) (N-Nj + i)
и т.д.
Выражение приращения сумматора 4 в п-м итерационном цикле может быть записано-следующим образом:
п-Г
Д, (N-N3 + 1) CM(N-N5)+ N,Nj (,+ir М() +
+ N,N3.
(1)
Таким образом, поскольку при заданных значениях кодов чисел
-I N4 9+ NJ- - N + 1 1
имеем сходящийся к нулю ряд приращений , условием окончания итерационного процесса будет равенство кодов чисел, поступающих на вычитатель 2, т.е.
(N -N)-Nj Nj (N 0+ Nj) ,
где Nj - число, соответствующее коду на выходе накапливающего сумматора А.
Отсюда в установившемся режиме
(
N,N
-N,9Nr
Число, соответствующее коду на выходе умножителя 11, определяется выражением
(N4® + N5-) N3 -N 0 - NfСумма N, формируемая при этом на выходе сумматора 5, определяет результат функционального преобразования
N N,© +
N,Nj( + Nr) Nj -N 0 - N
N, H4@- (N. Nj -N, Nj N )g-N Nj Nr N O- Nj + Hjили при заданных N, , , Nj , N , N.N 0,408226 -0,7764 - 0,0102 0,59863 0 - 0,59857
Вьфаженне (2) аппроксимирует функцию с приведенной погрещностью, не превышающей 0,055%, Качество дробно- рациональной аппроксимации иллюстрируется графиком абсолютной погрешности аппроксимации, приведенной на фиг. 3. Приведенный диапазон изменения О соответствует диапазону изменения аргумента тангенсной функции (0-88,2 ), что в 1,96 раза шире диапазона изменения аргумента прототипа.
Предлагаемое устройство является более помехоустойчивым благодаря отсутствию сдвиговы операций в алгоритме преобразования, поскольку сбойные ситуации в этом случае могут при1334144
вести к окончательному искажению результата в устройстве прототипа. Появление единичных сбоев вследствие следящего режима работы благодаря налргчию отрицательной обратной связи отрабатывается с восстановлением результата. В случае сбоя вследствие постоянного формирования приращения 10 сумматора 4 устройство стремится к динамическому равновесию, характеризуемому стремящимися к нулю приращениями этого сумматора.
15
Формула изобретения
)
.
Устройство для вычисления тригонометрического тангенса, содержащее блок синхронизации, коммутатор, два вычитателя, два сумматора, накапли20 вающий сумматор, первый выход блока синхронизации соединен с управляющим входом коммутатора, второй выход блока синхронизации соединен с управляю- Щ51м входом накапливающего сумматора,
25 отличающееся тем, что, с целью расширения диапазона изменения аргумента, в него введены четыре умножителя, причем вход задания первой константы устройства соединен с
30 входом первого сомножителя, первого умножителя, вход аргумента устройства соединен с входом второго сомножителя первого умножителе и с входом перво го сомножителя второго умножи25 теля, входы задания второй и третьей констант постоянных устройства соединены соответственно с первым информационным входом коммутатора и входом уменьшаемого первого вычита40 теля, входы задания с четвертой по шестую констант устройства соединены соответственно с входом первого сомножителя третьего умножителя, с входом второго сомножителя второго ум45 ножителя и входом первого операнда первого сумматора, выход которого соединен с входом первого сомножителя четвертого умножителя, выход которого соединен с входом вычитаемого
5Q второго вычитателя и входом первого операнда второго сумматора, вход второго операнда которого соединен с выходом первого умножителя, .выход первого вычитателя соединен с входом
5g второго сомножителя третьего умножителя, выход которого соединен с дом уменьшаемого второго вычитателя, выход которого соединен с вторым информационным входом коммутатора, вы5133414Д
ход которого соединен с информацион- вычитателя, выход второго умножителя ным входом накапливающего сумматора, соединен с входом второго операнда выход которого соединен с входом второго сумматора, выход второго сум- второго сомножителя четвертого матора является выходом функции уст- жителя и входом вычитаемого первого ройства.
Фиг. 3
Составитель 3 Шершнева Редактор Е. Копча Техред И,Попович Корректор А. Зимокосов
3963/45
Тираж 672 Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб„, д„ 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул Проектная, 4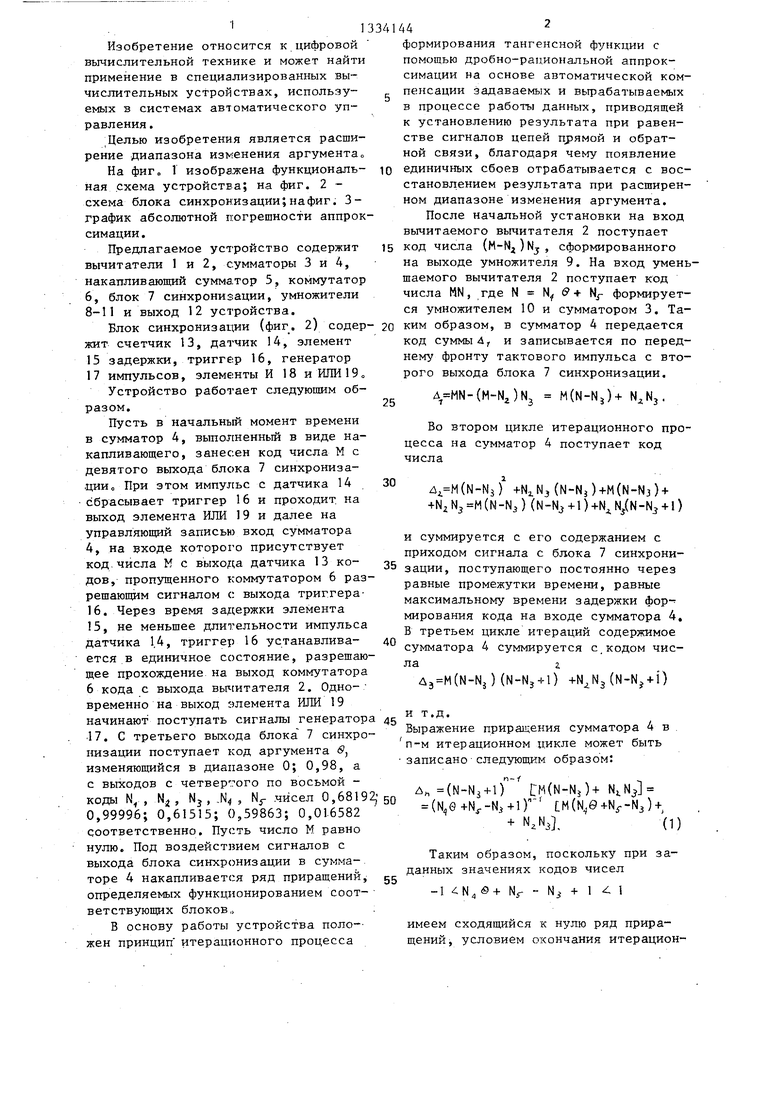
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ВЫЧИСЛЕНИЯ ЛОГАРИФМА | 1991 |
|
RU2006916C1 |
| Цифровое множительно-делительное устройство | 1990 |
|
SU1730623A1 |
| Устройство для потенцирования | 1990 |
|
SU1815635A1 |
| Вычислительное устройство | 1989 |
|
SU1691837A1 |
| Устройство для вычисления модуля и аргумента вектора | 1986 |
|
SU1403063A1 |
| Устройство для воспроизведения функций | 1986 |
|
SU1361549A1 |
| Устройство вычисления функции арктангенс отношения | 1988 |
|
SU1585793A1 |
| Функциональный преобразователь | 1983 |
|
SU1107131A1 |
| Преобразователь угловых перемещений в код | 1985 |
|
SU1311024A1 |
| Интерполятор | 1986 |
|
SU1396140A1 |
| Устройство для вычисления тригонометрического тангенса | 1982 |
|
SU1043643A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Устройство для вычисления тригонометрического тангенса | 1973 |
|
SU537344A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
