Изобретение относится к сельскому хозяйству, а именно к автоматизированному кормораздающему устройству.
Цель изобретения - расширение функ циональных возможностей,
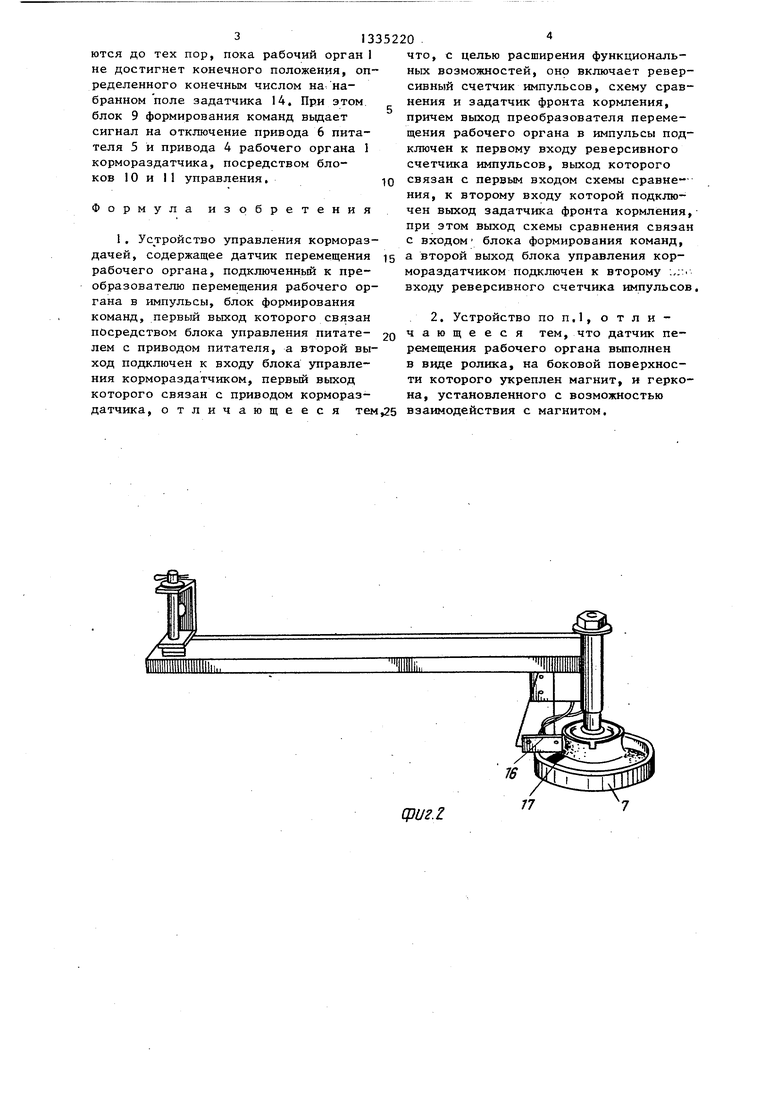
На фиг,1 представлена функциональная схема управления кормораздачей; на фиг.2 - датчик положения рабочего органа (ленты) с герконом и постоян- ным магнитом, общий вид;, на фиг.З - схема установки датчика положения рабочего органа (ленты); на фиг,4 - схема электрическая принципиальная преобразователя перемещения рабочего органа в электрические импульсы.
Устройство управления кормораздачей, осуществляемой с помощью кормораздатчика, включающего рабочий орган 1 , например, ленту, барабаны 2 и 3, привод 4 кормораздатчика, питатель 5 с приводом 6, содержит датчик перемещения рабочего органа в виде подпружиненного ролика 7, преобразователь 8 перемещения рабочего органа в виде подпружиненного ролика, преобразователь 8 перемещения рабочего органа в импульсы, блок 9 формирования команд, блок 10 управления питателем, блок П управления кормораздатчиком, реверсивный счетчик 12 импульсов, схему 13 сравнения, задат- чик 14 фронта кормления.
Преобразователь 8 перемещения рабочего органа в импульсы подключен к датчику 7 перемещения рабочего ор
гана, первый выход блока 9 формирования команд связан посредством блока 10 управления питателем 5 с приводом 6 питателя 5, а второй выход подключен к входу блока 11 управления кормораздатчиком, первый выход которого связан с приводом 4 кормораздатчика, выход преобразователя 8 перемещения рабочего органа в импульсы подключен к первому входу реверсивного счетчика 12 импульсов, выход которого связан с первым входом схемы 13 сравнения, к вЛрому входу которой подключен выход задатчика 14 фронта кормления, при этом выход схемы 13 сравнения связан с входом блока 9 формирования ко;манд, а второй выход блока 11 управления-кормораздатчиком подключен к второму входу реверсивного Ьчетчика 12 импульсов,
Датчик перемещения рабочего орга- на содержит ролик 7, прижатый к рабочему органу 1 пружиной 15, установлен
ный на ролике 7 постоянный магнлт 16 и геркон 17, Преобразователь 8 перемещения рабочего органа в импульсы состоит из триггера Д 1, реализованного, например, на микросхеме К 155 ЛАЗ, Триггер Д1 служит для исключения дребезга контактов геркона 17 на результат счета.
Устройство работает следующим образом.
Оператор устанавливает рабочий орган (ленту ) 1 кормораздатчика в исходное положение и набирает на задат- чике 14 последовательность чисел, со- ответствующик занятым местам фронта кормления. После этого он нажимает кнопку блоке 11 управления (не показана) привода 4, счетчик 12 сбрасьшается в нулевое состояние, а -рабочий орган 1 начинает перемещать
ся, вращая при этом ролик 7, на кото0
5
ром установлен постоянный магнит 16, Геркон 17 замыкает и размыкает свои
5 контакты, по мере прохождения возле него постоянного магнита 16, преобразуя тем самым вращение ролика 7 и, следовательно, перемещение рабочего органа 1 в электрические импульсы, которые подсчитьшают реверсивный счетчик 12 импульсов. На выходе счетчика I2 появляются сигналы в виде чисел, которые схема 13 сравнения сравнивает с числами, набранными на за- датчике 14 фронта кормления. При совпадении обоих чисел схема 15 сравнения выдает сигнал блоку 9 формирования команд, который включает посредством блока 10 управления питатеQ лем 5 привод 6 питателя 5, Последний начинает работать, подавая корм на ; перемешивающийся под ним участок рабочего органа 1,
Когда рабочий орган (лента) 1 переместиться на заданное на задатчи- ке 14 расстояние (число на счетчике 12 станет равным заданному на за- датчике 14), устройство 13 сравнения выдает сигнал на блок 9 формирования команд, который посредством блока 10 управления отключает привод 6 питателя 5, Таким образом прекращается подача корма на рабочий орган 1, а он продолжает перемещаться. Затем при подходе к питателю 5 участка рабочего органа 1, соответствующего занятому животным фронту кормления, пи- татель 5 включается аналогично описанному. Указанные операции повторя5
0
5
ются до тех пор, пока рабочий орган 1 не достигнет конечного положения, определенного конечным числом на набранном поле задатчика 14. При этом, блок 9 формирования команд вьщает сигнал на отключение привода 6 питателя 5 и привода 4 рабочего органа 1 кормораздатчика, посредством блоков 10 и II управления.
Формула изобретения
1 , Ус гройство управления кормораз- дачей, содержащее датчик перемещения рабочего органа, подключенный к преобразователю перемещения рабочего органа в импульсы, блок формирования команд, первый выход которого связан посредством блока управления питате- лем с приводом питателя, а второй выход подключен к входу блока управления кормораздатчиком, первый выход которого связан с приводом кормораздатчика, отличающееся тем
что, с целью расширения функциональных возможностей, оно включает реверсивный счетчик импульсов, схему сравнения и задатчик фронта кормления, причем выход преобразователя перемещения рабочего органа в импульсы подключен к первому входу реверсивного счетчика импульсов, выход которого связан с первым входом схемы сравне- ния, к второму входу которой подключен выход задатчика фронта кормления, при этом выход схемы сравнения связан с ВХОДОМ блока формирования команд, а второй выход блока управления кормораздатчиком подключен к второму .,;: входу реверсивного счетчика импульсов,
2. Устройство по п.1, отличающееся тем, что датчик перемещения рабочего органа выполнен в виде ролика, на боковой поверхности которого укреплен магнит, и герко- на, установленного с возможностью взаимодействия с магнитом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления кормораздачей | 1976 |
|
SU662049A1 |
| Устройство управления дозатором мобильного кормораздатчика | 1981 |
|
SU988253A1 |
| Устройство для программного управления подачей длинномерного материала в рабочую зону обрабатывающей машины | 1982 |
|
SU1092482A1 |
| Устройство для автоматического управления рабочим органом землеройно-транспортной машины | 1986 |
|
SU1439272A1 |
| Устройство для весового учета материалов, перекачиваемых пневмокамерными питателями | 1977 |
|
SU711366A1 |
| Устройство управления перемещением сматываемого с рулона длинномерного материала | 1987 |
|
SU1505623A2 |
| Система программного управления подачей длинномерного материала в рабочую зону обрабатывающей машины | 1986 |
|
SU1335932A1 |
| Кормораздатчик | 1983 |
|
SU1118324A1 |
| Способ кормления птицы при ее содержании в клеточных батареях | 1990 |
|
SU1800947A3 |
| ДАТЧИК ПОЛОЖЕНИЯ ОБОРУДОВАНИЯ ГРУЗОПОДЪЕМНОЙ МАШИНЫ | 2006 |
|
RU2331571C1 |

Изобретение относится к сельскому хозяйству. Целью изобретения является расширение функциональных возможностей. При перемешивании рабочего органа 1 вращается ролик 7 с магнитом. Импульсы с геркона поступают на счетчик импульсов 12, где непрерьшно суммируются. При совпадении на входах схемы сравнения 13 текущей информации с информацией, набранной на зада тчике фронта кормления 14, включается в работу питатель 5, подавая корм на участок рабочего органа 1. Отклонение питателя 5 осуществляется по следующему совпадению текущего и заданного чисел. Эти операции повторяются до тех пор, пока рабочий орган не достигает конечного положения, определенного числом на наборном поле задатчика фронта кормления 14. 1 з.п. ф-лы, 4 ил. с & Сдд СО сд ю 1C
(PU2.Z
////////.
U2.5
HiSSJIAb
Л/ HO вход
Редактор Н.Рогулич
Составитель Л.Кузнецова
Техред М.Двдык КорректорМ.Демчик
Заказ 4813Тираж 627Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная,4
.lf
| ЭЛЕКТРОД ДЛЯ ОТВЕДЕНИЯ БИОЭЛЕКТРИЧЕСКИХ ПОТЕНЦИАЛОВ | 1965 |
|
SU198502A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
