деталь захвачена захватным устройством 18. Рабочая среда подается в по- лбсть силового цилиндра 4 под поршень 5, поднимая штангу 7 с захватным устройством 18 в крайнее верхнее положение. Затем рабочую среду подают в дополнительный силовой цилиндр 9 под поршень 10, который поднимает
1
Изобретение относится к машиностроению, к автоматизации сборочных технологических процессов и предназначено для захвата, перемещения и установки деталей в процессе сборки, например, трубопроводной арматуры.
Цель изобретения - расширение технологических возможностей автооператора .
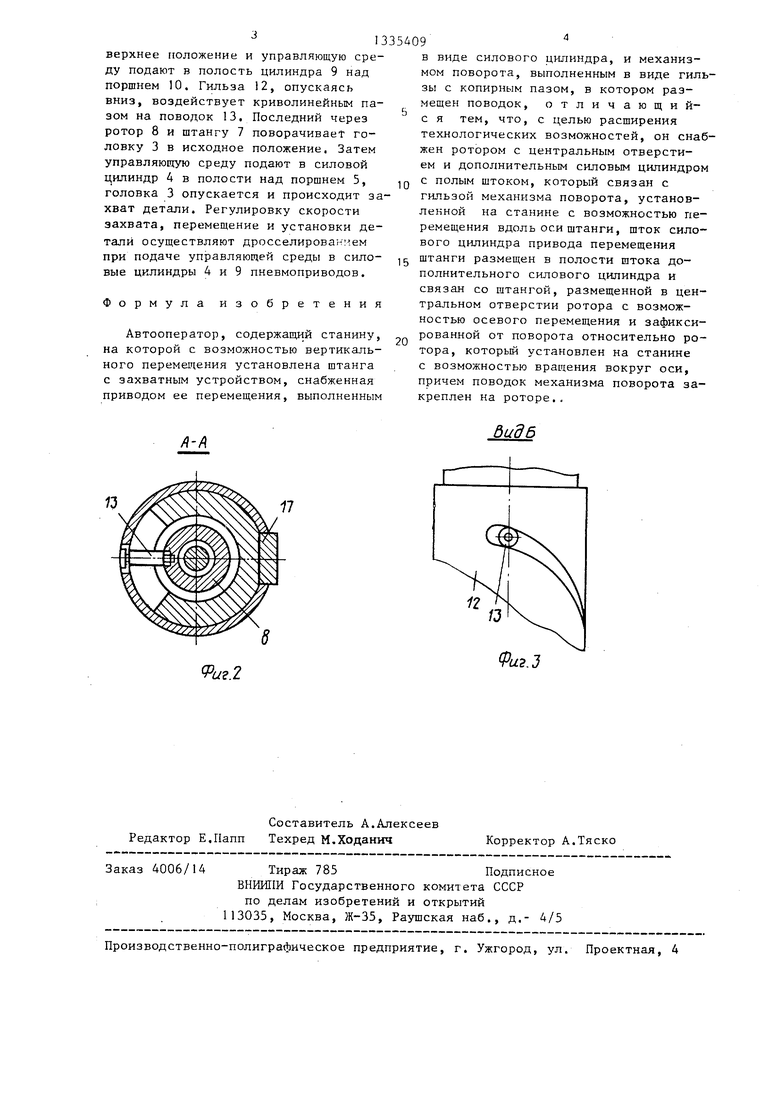
. На фиг. 1 изображен автооператор, разрез; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 вид Б на фиг. 1.
На основании станины 1 автооператора установлен порщневой пневмопри- вод 2, состоящий из привода подъема головки 3 и привода поворота ее в горизонтальной плоскости. Пневматический привод подъема головки 3 содержит силовой цилиндр 4, во внутрен Ней полости которого расположен с возможностью поступательного движения поршень 5, соединенный с головко 3 через шток 6, и штанга 7 со шлицами. Штанга 7 шлицами входит в отвер- СТИВ ротора 8. Пневматический привод поворота головки 3 содержит дополнительный силовой цилиндр 9, во внутренней полости которого расположен поршень 10 и польй шток 11, надетые на шток 6. Поршень 10 соединен с головкой 3 через криволинейньй паз, выполненный в .подвижной гильзе 12, поводок 13 с роликом и ротор 8. Штанга 7 соединена со штоком 6 посредством подшипника 14, а ротор 8 соединен с корпусом 15 при помош 1 подшипников 16. Корпус 15 жестко соединен со станиной 1 посредством кронштейна
17. Для движения, гильзы 12 через кронштейн 17 вверх в последнем выполнен вдоль его образующей паз. На свободном конце головки 3 установлено за335409
гильзу 12, в результате чего поводок 13, взаимодействуя с криволинейным пазом гильзы 12, поворачивает ротор 8 со штангой 7 на заданный угол. Опускание захватного устройства осуществляется силовым цилиндром 4,,-Возврат в исходное положение происходит в обратном порядке. 3 ил.
5 0 5 О
5
0
хватное устройство 18. При поступательном движении гильзы 12 криволинейный паз, воздействуя на поводок 13, поворачивает ротор 8 с штангой 7 I горизонтальной плоскости. С целью беспрепятственного поворота поводка 13 относительно корпуса 15 в последней выполнен секторный паз.
Цикл работы автооператора: захват детали, подъем головки в крайнее верхнее положение, поворот ее с деталью в горизонтальной плоскости против часовой стрелки, опускание ее с деталью (установка детали), возврат в исходное положение.
Антооператор работает следующим образом.
В исходном положении головка 3 находится в нижнем положении, деталь захвачена захватным устройством 18. По команде управляющую среду (воздух под избыточным давлением) подают в полость силового цилиндра 4 под поршень 5, поднимая через шток 6 и штангу 7 головку 3 с захватным устройством 18 в крайнее верхнее положение. После зтого управляющую среду подают в дополнительньй силовой цилиндр 9 под поршень 10, которьш перемещается со штоком 11 и гильзой 12 вверх. В период подъема гильзы 12 ролик поводка 13, взаимодействуя с криволинейным пазом в стенке гильзы 12, поворачивает ротор 8 со штангой 7 и головкой 3 на заданный угол, после чего управляюшую среду подают в полость под поршнем 5. Головка 3 опускается и устанавливает деталь. После установки детали управляющую среду подают под поршень 5 в полость силового цилиндра 4, головка 3 с захватным устройством 18 поднимаются в крайнее
верхнее положение и управляющую среду подают в полость цилиндра 9 над поршнем 10. Гильза 12, опускаясь вниз, воздействует криволинейным пазом на поводок 13. Последний через ротор 8 и штангу 7 поворачивает головку 3 в исходное положение. Затем управляющую среду подают в силовой цилиндр 4 в полости над поршнем 5, головка 3 опускается и происходит захват детали. Регулировку скорости захвата, перемещение и установки детали осуществляют дросселированием при подаче управляющей среды в силовые цилиндры 4 и 9 пневмоприводов.
Формула изобретения
Автооператор, содержащий станину, на которой с возможностью вертикального перемеп(ения установлена штанга с захватным устройством, снабженная приводом ее перемещения, выполненным
/1-А
0
5
0
в виде силового цилиндра, и механизмом поворота, выполненным в виде гильзы с копирным пазом, в котором размещен поводок, отличающий- с я тем, что, с целью расширения технологических возможностей, он снабжен ротором с центральным отверстием и дополнительным силовым цилиндром с полым щтоком, который связан с гильзой механизма поворота, установленной на станине с возможностью перемещения вдоль оси штанги, шток силового цилиндра привода перемещения штанги размещен в полости штока дополнительного силового цилиндра и связан со штангой, размещенной в центральном отверстии ротора с возможностью осевого перемещения и зафиксированной от поворота относительно ротора, которьй установлен на станине с возможностью вращения вокруг оси, причем поводок механизма поворота закреплен на роторе..
дидВ
12
/J
и.2
Редактор Е.Папп
Составитель А.Алексеев Техред М.Ходанич
4006/14
Тираж 785Подписное
ВНИШШ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.- 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Фиг.З
Корректор А.Тяско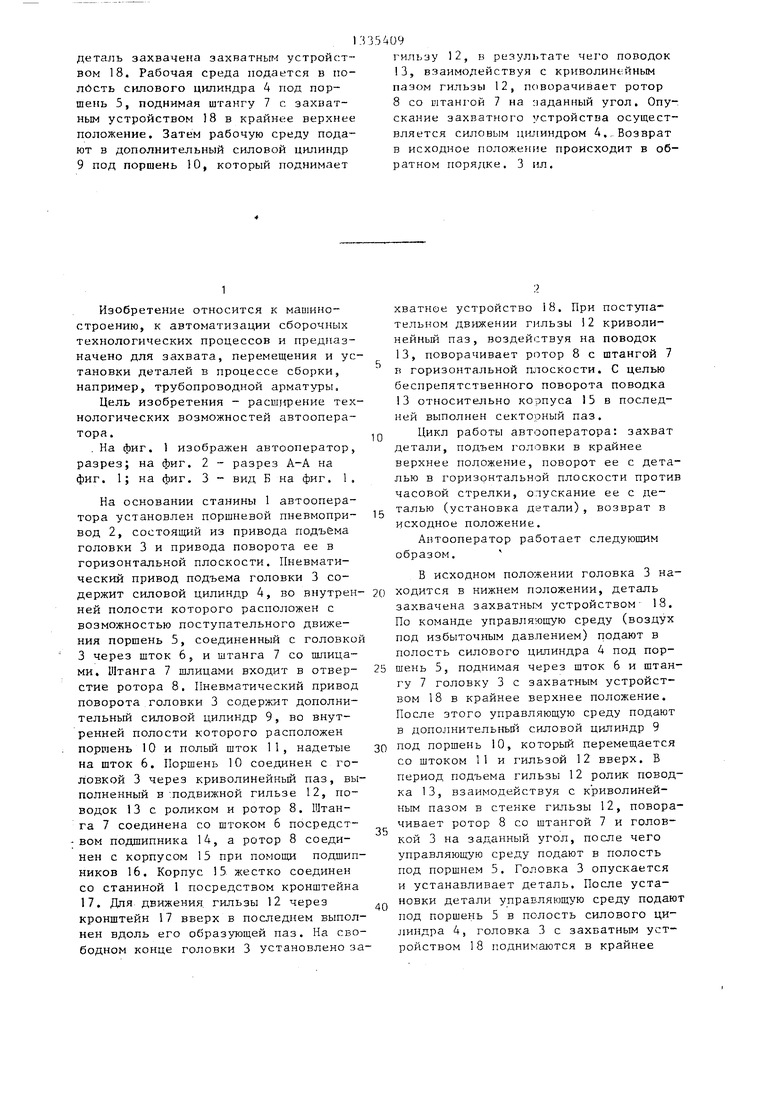
| название | год | авторы | номер документа |
|---|---|---|---|
| Автооператор | 1978 |
|
SU749629A1 |
| АВТОМАТ ДЛЯ СБОРКИ УЗЛОВ | 1991 |
|
RU2022752C1 |
| Технологический комплекс для обработки цилиндрических деталей | 1989 |
|
SU1761436A2 |
| АВТОМАТИЧЕСКАЯ ЛИНИЯ МЕХАНИЧЕСКОЙ ОБРАБОТКИ ДЕТАЛЕЙ ТИПА ВАЛОВ ИЛИ СТАКАНОВ | 1969 |
|
SU237539A1 |
| Автооператор | 1987 |
|
SU1465244A1 |
| Автооператор | 1975 |
|
SU598732A1 |
| Захват манипулятора | 1980 |
|
SU984861A2 |
| ВСЕСОЮЗНАЯ i | 1972 |
|
SU359130A1 |
| Автооператор | 1984 |
|
SU1191256A1 |
| Многошпиндельный сверлильный станок | 1982 |
|
SU1034848A1 |
Изобретение относится к области машиностроения и предназначено для захвата, перемещения и установки деталей в процессе сборки. Целью изобретения является расширение технологических возможностей. В исходном положении головка 3 находится внизу, (Л со со сд 4 о со
| Автооператор | 1983 |
|
SU1144843A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
