Изобретение относится к машиностроению а именно к автооператорам аля транспортировки изделий от накопителя заготовок в зону обработки и перемещения готовых деталей из зоны обработки к позиции раз- грузки.
Известно устройство, предназначенное для крепления изделий при их транспортировке в процессе обработки, в котором содержителя цанга, зажимаемая кольцом, соединенным с приводом штангами I l Недостатком указанного устройства при его применении в автооператоре для транспортировки изделий является сложность конструкции.
Наиболее 0лизким решением к предлагаемому является автооператор, в котором содержится установленная на корпусе механическая рука, выполненная в виде силового цилиндра с захватом, включающим цангу и зажимное кольно, соединенное с приводом штангйми .
Однако указанный автооператор не обеспечивает надежной работы при освобождении
готовой детали из захвата на позиции разгрузки.
Цель изобретения - повышение надежности работы и упрощение конструкции
Указанная цель достигается тем, что зажимное кольцо смонтировано на корпусе с возможностью свободного продольного перемещения и подпружинено, а штанги снабжены регулируемЬ1ми упорами, при этом цанга жестко соединена со штоком цилин- ара.
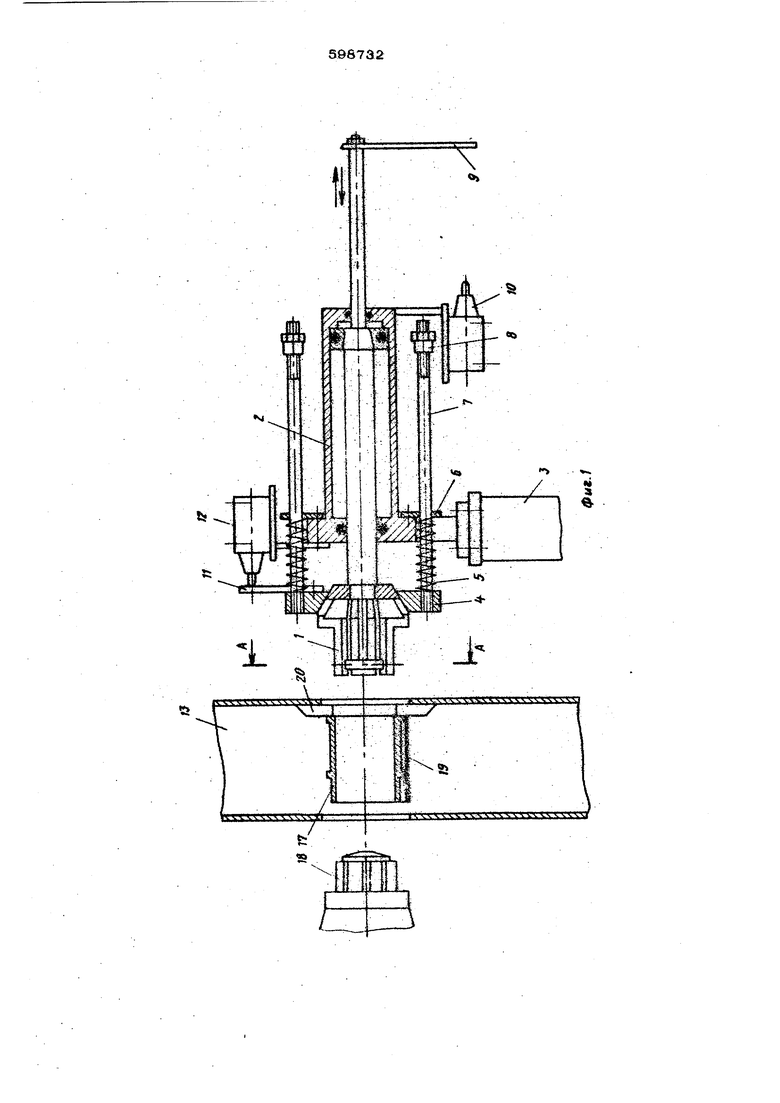
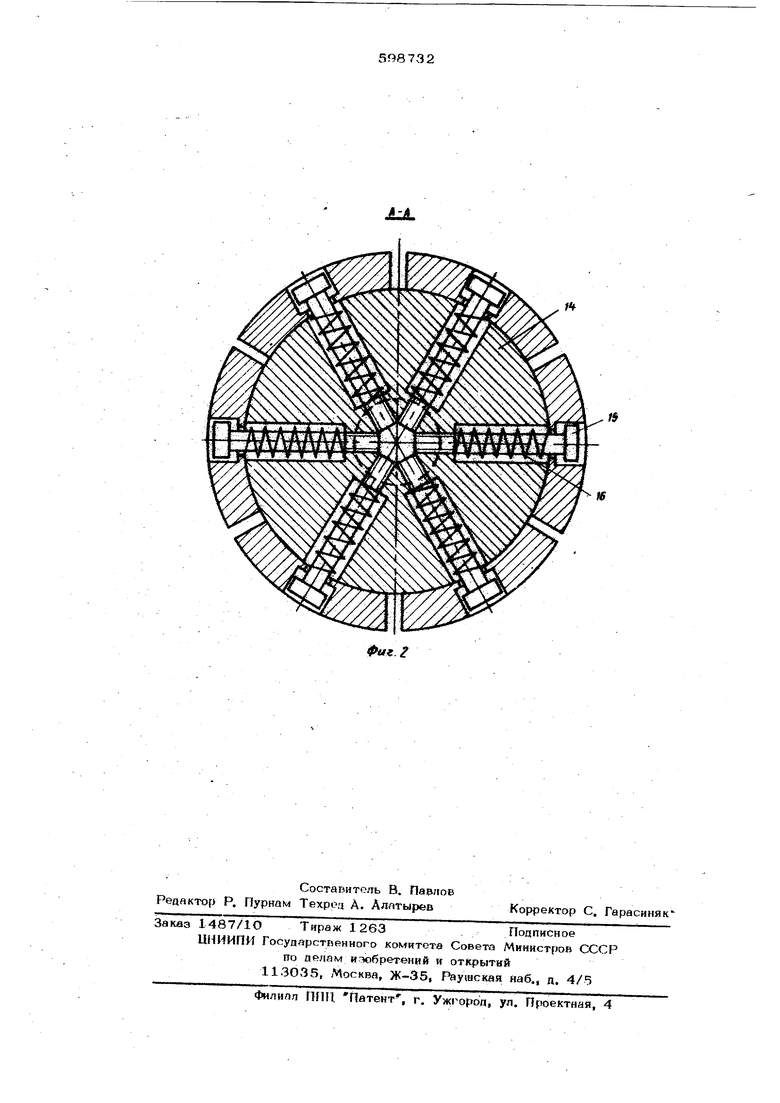
На фиг. 1 изображен автооператор, обший ВИД} на фиг. 2 - разрез по А-А на фиг. 1.
Автооператор содержит цингу 1 захвата механической руки, выполненной в виде силового цилиндра 2, установленного на корпусе 3. Зажимное кольцо 4 смонтировано на корпусе с возможностью свободного продольного перемещения, подпружинено пружинами 5, опирающимися на фланец 6; закрепленный на корпусе силового цилиндра и соединено с приводом штангами 7 с расположенными на нх свободных концах регулируемыми упорами 8. На штоке силового Шлвиора установлен упор Q, а на корпусе концевой вьключагепь 1О для ограничений перемещення ивигн 1 вперед. На кольце 4 закреплен /вор 11, взаимодействующий с концевым выкяюнателвм 12 аля огрвничени перем цення оанга аазад. Концевые выключатели Ю и 12 включены в систему уирав Неякя приводом перамешання цанги - садовым иидвядром 2 R приводами перемешения автооовратара, пдкоШтеля, 13 и зажимисто устройства обслуживаемого стан ка (на чертеже fie обоэначеко). Внутри цанги 1 вьяюлнены ограничители 14 зажим цангв « оррв;й11чятедьвые винты 15с пружинами 16 разнс1 } %вцз| Г|1. Ав-рооператор р)йбответ елецукяцим образом. Исходя из Вну1гре его диаметра обрабатываемой детали ироизводят с номошью элементов 14, 15 и 16 цангн 1 ее регулировку. При установке детали 17 на зажимное устройство 18 шпинделя обслуживаемого станка подают рабочую среду в 11равую полость силового иилиицра 2, за счет чего его поршень начинает перемещаться влево, перемещая захватную айнгу 1 совместно с упором 9 отрданичеНйЯ перемещения цанги, Поадейср&н ем пружин 5 кольцо 4 ивремзд1ается влево до тех вор, пока упоры 8 схгранйчеийя хода штанг 7 не ущ)утся во фланец 6 корпуса силового нилиядра 2, В этот момент кольцо 4, ар этого принудительно деформируюшее цангу 1, останавливвется, а цанга, проаояжа перемещаться влево, захватывает деталь 17 с полки накопителя 13 и , перемешаясь далыце, надевает ее на зажимное устройство 18 шпин деля станка. При этом сра тывает концевой выключатель 10, HoaaJBaa команду на возврат за хватной 1 в исходное положение. При вьиолнении операции съема обработанного изделия с зажимного устройства 16 шпинделе станка цанга 1, перем«шаась в крайне левое положение, войдет во внутреннее отверстие обработанной детали 17. При этом упор 9 ограничения перемещения цанги, воздействуя на концевой вьсключатель 10 выз|Е тает его срабатывание, что приводит к подаче команды на разжим зажимного ycTpoteTBa 18 шпинделя станка ц на перемещение захватной цанги 1 с деталью 17 в правое положение. Дойдя до того места, где находится кольцо 4, цанга 1 входит в корпусное от верстие кольца и сжимается. Деталь 17 свободно повиснет на захватной цанге 1, которая, перемешаясь дальше вправо и проходя через окно в накопителе 13, оставит на полке 19 деталь 17, цррдвиженик которой дальше будет препятствовать планка 20. С помощью концевого выключателя 12 подается команда на остановку цанги в исходном положении и т.д. Формула и зобретения Автооператор, содержащий установленную на корпусе механическую Руку, выполненную в виде силового цилиндра с захватом, включающим цангу и зажимное кольцо, соединенное с приводом штангами, отличающийся тем, что, с целью повышения надежности работы и упрощения конструкции, зажимное кольцо смонтировано на корпусе с возможностью свободного про- дольного перемещения и подпружинено, а штанги снабжены регулируемыми упорами, при этом цанга жестко соединена со штоком цилиндра. Источники информации, принятые во внимание при экспертизе: 1.Авторское свидетельство N 64894, кл. В 23 в 31/20, 1942. 2.Патент ФРГ 22373О5, кл. 49 а 11/00, 1973.
о
| название | год | авторы | номер документа |
|---|---|---|---|
| Автооператор | 1987 |
|
SU1465244A1 |
| Устройство для автоматической смены инструмента | 1983 |
|
SU1135593A1 |
| Автооператор | 1985 |
|
SU1283035A1 |
| Захватное устройство | 1988 |
|
SU1502298A1 |
| МАНИПУЛЯТОР | 2002 |
|
RU2228259C2 |
| Автооператор | 1975 |
|
SU541639A1 |
| АВТОМАТ ДЛЯ СБОРКИ УЗЛОВ | 1991 |
|
RU2022752C1 |
| АВТОМАТИЧЕСКАЯ ЛИНИЯ МЕХАНИЧЕСКОЙ ОБРАБОТКИ ДЕТАЛЕЙ ТИПА ВАЛОВ ИЛИ СТАКАНОВ | 1969 |
|
SU237539A1 |
| Автоматическая линия для обработки крупногабаритных колец | 1985 |
|
SU1252132A1 |
| Технологический комплекс для обработки цилиндрических деталей | 1989 |
|
SU1761436A2 |
т
Щ
3;
/
1
-WS
I-
Jr
:
.А 1|Хдм УМР -
fc
«о
У « . - .
Si
.....I
№
фиг I
