13
этого поворотный стол 5 имеет рольганг 6 с приводными роликами, Fla рольганге 6 установлено на специальном поддоне 21 основание 22 с магазинами для стоп плоских заготовок. Стержень 7, взаимодействующий с опор- Hoi i площадкой при перемещениях, установлен на траверсе подпружинен1щм и с возможностью поворота и небольшого осевого смещения относительно траверсы. Опорная площадка состоит из двух дополнительных планок ЗА и 35, одни края которых шарнирно соеди1
Изобретение относится к оборудованию для автоматизации производственных процессов и может быть использовано в различных отраслях народного хозяйства для кассетирования (стапелирования) и подачи заготовок в зону захвата робота технологического комплекса.
Цель изобретения - повышение надежности работы устройства за счет ликвидации перекашивания стопы деталей при выдаче ее на уровень выгрузки и заедания стержня при вхождении через отверстия в столе.
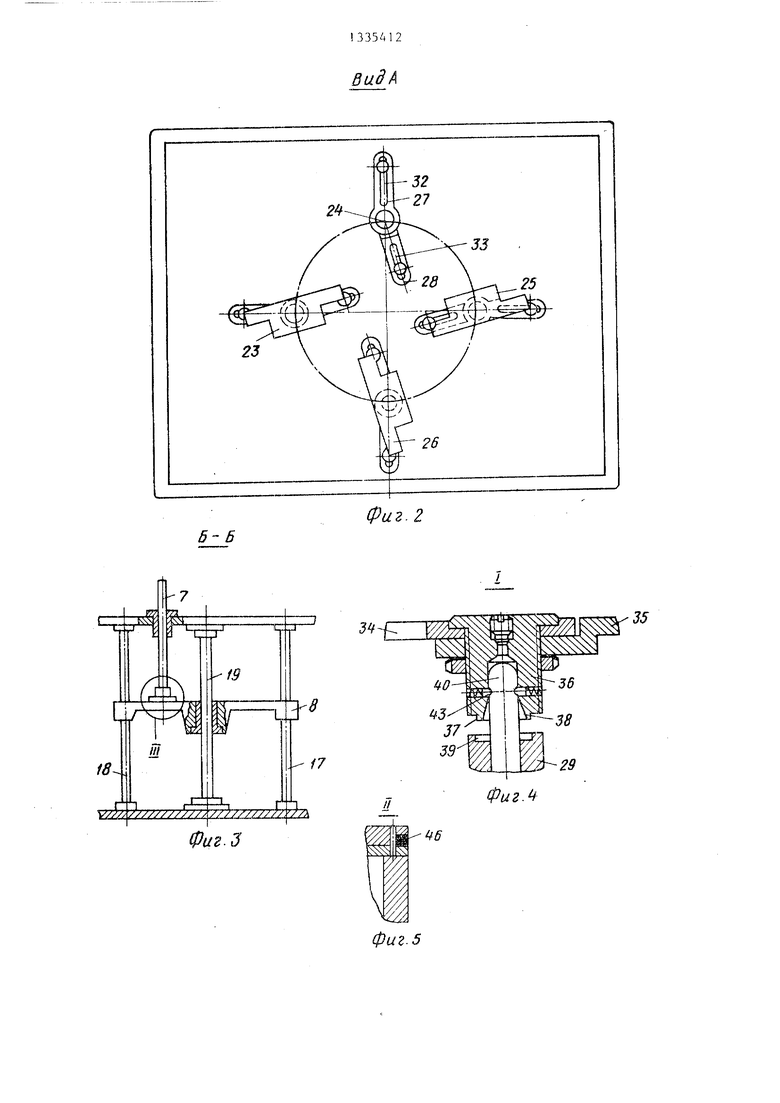
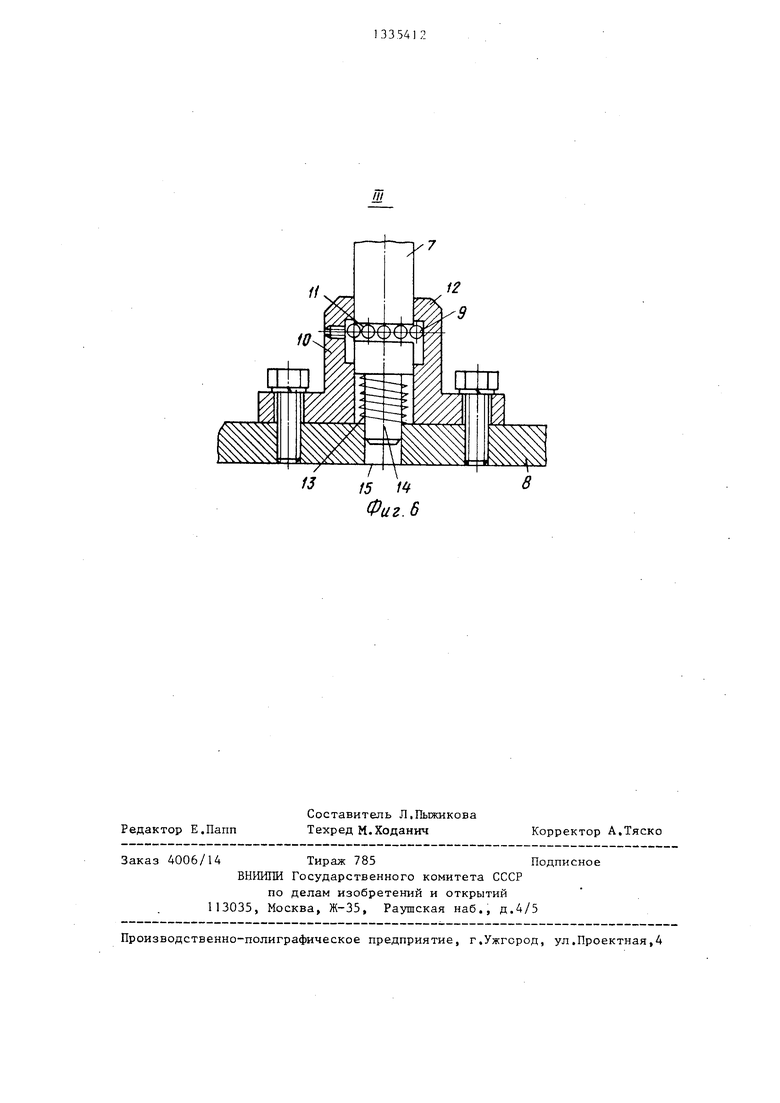
На фиГ(,1 изображено устройство, продольный разрез; на фиг.2 - вид А на фиг.1; на фиг.З - разрез Б-Б на фиг.1} на фиг.4 - узел 1 на фиг,1; на - узел II на фиг,1; на фиг,6 узел III на фиг.З
Устройство содержит станину 1, в ступице 2 которой вращается ось 3, соединенная посредством фланца 4 с горизонтальным вращающимся столом 5, с рольгангом 6, снабженным приводом (не показан), стержень 7, связанный с траверсой 8 шариковой опорой 9, помещенной в полости, образованной кольцевыми выточками 10 и 11 соответственно корпуса 12 и стержня 7, Опора 9 поджимается к верхней части выточки IО корпуса 12 пружиной 13, надетой на конец 14 стержня 7 входящей в отверстие 15 траверсы 8„
На станине 1 закреплен привод 16 поворота стола 5, взаимодействующий
5412
иены при помощи цанги 36 с конусным центральным отверстием, посредством которого она взаимодействует со сферической цапфой стержня 7. Другие края планок 34 и 35 установлены с возможностью поворота и перемещения в пазах планок, надеты на базирующие направляющие магазинов устройства При взаимодействии стержни 7 с цангой 36 опорной площадки магазина осуществляется поштучная подача деталей из магазина в зону действия схвата манипулятора, 6 ил.
С осью 3 посредством зубчатой передачи Траверса 8 приводится в движение по направляющим 17 и 18 (при помощи которых траверса 8 вмонтирована в станину 1) винтом 19 от индивидуального привода 20.
На поддоне 21 смонтировано основание 22, размещенное на столе и несущее по окружности магазины 23-26 Каждый из магазинов содержит Hecymjie планки 27 и 28, установленные на оси 29, вставленной в отверстия основания 22, вертикальные базирующие
направляющие 30 и 31, установленные в пазах 32 и 33 несущих планок 27 и 28 подвижно с возможностью поворота, и опорную плош,адку, состоящую из двух дополнительных планок 34 и
35 с пазами, соответствуюпщми пазам 32 и 33 планок 27 и 28, и одними краями шарнирно соединенные между собой пальцами 36, содержащими на торце цилиндрический уступ 37 и конусное отверстие 38, взаимодействующие соответственно с отверстием 39 оси 29 и концом 40 стержня 7, выполненного в виде сферической цапфы.
Дополнительные планки 34 и 35 другими краями надеты на базирующие направляющие 30 и 31 на втулках 41 и 42, выполненных из антифрикционного материала и смонтированных в пазах планок ЗА и 35 с возможностью поворота и свободного перемещения вдоль пазов„ Конеп АО стержня 7 при
вхождении в отверстие 38 пальца 36. фиксируется цангой 43. На столе 5 установлены в отверстиях втулки 44 и 45 соосно с равномерно расположенными по окружности отверстиями поддо- на 21 и основания1чи 22,
В верхней части одной из двух базирующих направляющих (например 31) каждого магазина установлен индуктив- ный датчик 46 уровня стопы
Устройство pa6otaeT следующим
образом.
На заготовительный участок (не показан) доставляется поддон 21 со смонтированным на нем основанием 22, несущим магазины 23-26.
Магазины 23-26 кассетируются (ста пелируются) заготовками. Затем поддон с магазинами транспортируется на склад и устанавливается кран-шта- белером в соответствующую ячейку стеллажа (не показаны). По запросу с участка штамповки поддон с магазинами транспортируется к станине 1 загрузоч ного устройства, установленного в зоне робототехнологического комплекса (РТК). Включаются привод рольганга транспортного устройства (не показаны) и привод рольганга 6 поворот- ного стола 5 (не показан), и поддон с магазинами перемещается с(рольганга транспортного устройства на рольганг 6 поворотного стола 5 и устанавливается в требуемое исходное положение о Далее включается привод 20 перемещения траверсы 8 и подъема стержня 7. Стержень 7, поднимаясь, входит во втулки 44 и 45 стола 5 через отверстие оси 29 в конусное отверстие 38 пальца 36.
При соприкосновении конца 40 стержня 7 с сухарями цанги 43 происходит его фиксирование в отверстии 38 пальца 36. После фиксирования кон- ца 40 стержня 7 в отверстии 38 пальца 36 работа привода 20 переводится на режим шагового перемещения (узел шагового перемещения не показан) планок 34 и 35, осуществляющих подъем стопы заготовок под захват промышленного робота. Уровень заготовок контролируется индукционным дат
д
5
п 5 о д
5 Q
5
12
чиком 46. После выработки заготовок в одном из магазинов 23-26 работа привода 20 переводится на режим ускоренного ухода стержня 7 вниз в исходное положение. При этом производится посадка пальца 36 опоры стопы выступом 37 в отверстие оси 29 и расфик- сирование конца стержня 7. Системой управления (не показано) подается команда приводу 16 поворота стола 5 на подачу стопы заготовок следующего магазина Затем вновь включается привод 20 и цикл выработки заготовок повторяется.
Формула изо бретения
Загрузочное устройство, содержащее смонтированный на станине горизонтальный поворот {ый стол с рольгангом, на котором с возможностью перемещения установлена платформа с отверстиями для прохода стержня, установленного с возможностью шагового перемещения, и маг азинами,разме- щенными по его периферии и выполненными Б виде вертикальных направляющих, на которых установлена с возможностью перемещения опорная площадка взаимодействия со стержнем, отличающееся тем, что, с целью повышения надежности работы, стержень установлен с возможностью ограниченного перемещения в горизонтальной плоскости и выполнен подпру- жиненным относительно корпуса привода со сферической цапфой на рабочей части, при этом опорная площадка каждого магазина выполнена в виде двух планок шарнирно соединенных между собой посредством цанги с коническим центральным отверстием, расположенной с возможностью вза:имо- действия с цапфой стержня и дополнительно введенной в устройство втулкой, закрепленной в отверстии платформы, причем упомянутые планки расположены с возможностью относительного поворота, а вертикальные направляющие магазина установлены в пазах планок с возможностью их регулировочного перемещения.
Вид
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перемещения деталей с рабочей позиции пресса | 1981 |
|
SU967632A1 |
| Автоматическая линия для многопозиционной листовой штамповки | 1986 |
|
SU1470398A1 |
| Устройство для сталелирования штучных заготовок,отделения от стопы и перемещения | 1982 |
|
SU1110520A1 |
| Устройство для определения листовых заготовок от стопы и подачи их в пресс | 1984 |
|
SU1183254A1 |
| Устройство для стапелирования обработанных деталей | 1982 |
|
SU1072966A1 |
| Установка для штамповки деталей из листовых заготовок | 1979 |
|
SU863099A1 |
| Устройство для отделения от стопы листовых заготовок и подачи их в зону обработки | 1983 |
|
SU1087232A1 |
| Устройство для вырубки заготовок из плоского материала | 1980 |
|
SU929450A1 |
| Устройство для вырубки заготовок из полосового и ленточного материала | 1979 |
|
SU871926A1 |
| Устройство для поштучной подачи листовых заготовок в рабочую зону пресса | 1990 |
|
SU1727946A1 |
Изобретение относится к оборудованию для механизации погрузочно- разгрузочных транспортных и складских работ, а именно к устройствам для кассетирования (стапелирования) хранения и подачи плоских изделий к месту выгрузки в заданном положении ется повышение в работе. Для (Л с 00 00 ел 4ib
5- Б
фаг. 2
ИМ
39
Фиг. 3
и
Фиг.
46
ч фиг. 5
В
Редактор Е.Папп
Составитель Л.Пыжикова Техред М.Ходаннч
Заказ 4006/14Тираж 785Подписное
ВШШШ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная,А
Фиг. В
Корректор А.Тяско
