11
Изобретение относится к машиностроению, в частности к .захватным устройствам промышленных роботов (манипуляторов).
Цель изобретения - уменьшение вре мени настройки, а также обеспечение синхронности перемещения губок.
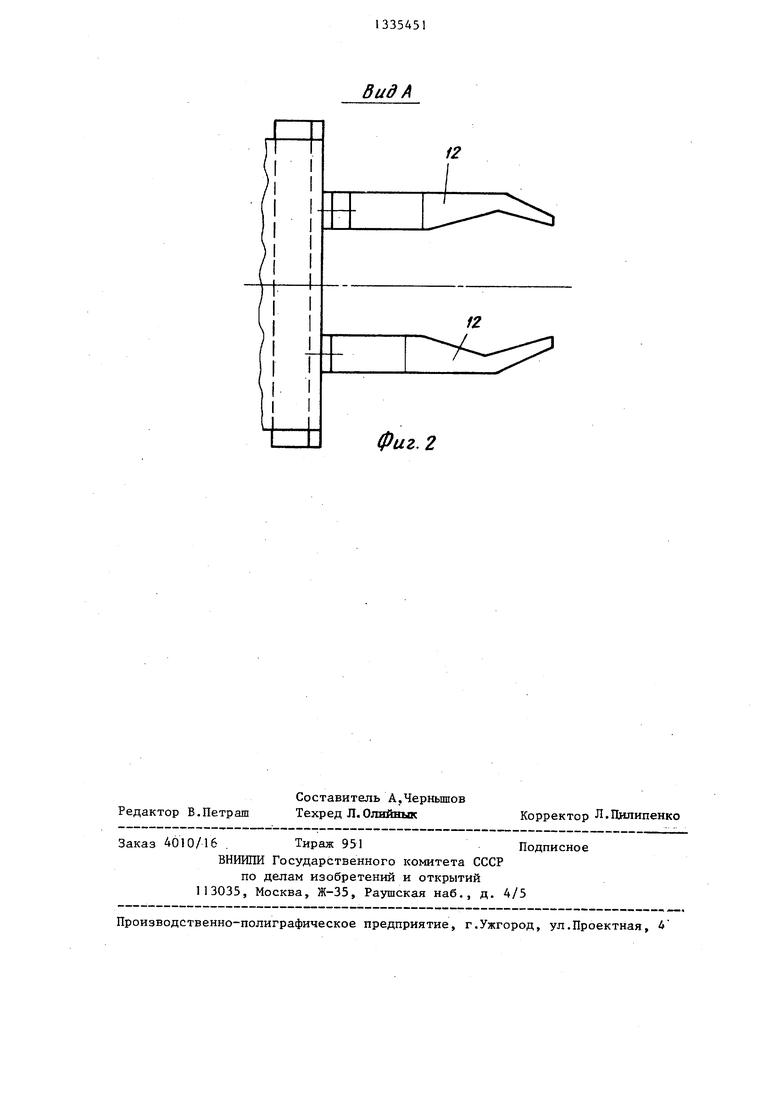
На фиг.1 изображен схват, разрез; на фиг.2 - вид А фиг.1.
Схват состоит из гильзы 1 силового цилиндра, поршня 2 с плоским штоком 3. На хвостовике штока установле на зубчатая-втулка 4 с фиксатором 5. Втулка 4 на хвостовике удерживается стопорным кольцом 6. С обеих сторон гильза 1 силового цилиндра закрыта крьш1ками 7 и 8. В крьш1ке 7 имеется отверстие для подачи рабочей среды в.полость силового цилиндра, а в крышке 8 симметрично расположены два паза, в которые входят рейки 9. Между поршнем 2 и 8 установлена пружина 10.
На боковых гранях плоского штока 3 и наружной поверхности втулки 4 имеются косые зубья 11, входящие в зацепление с соответствующими зубьями реек 9. К рейкам 9 крепятся губки 12,
На торцовой прверхности штока 3 расположены по олсружности кратно шагу зубчатого зацепления отверстия 13 служащие для фиксации втулки 4 относительно штока 3 с помощью фиксатора 5. Отверстия 13 расположе так, что при фиксации в них зубья втулки 4 совпадают с зубьями штока 3
Схват работает следующим образом.
При подаче рабочей среды в силовой цилиндр шток 3 выдвигается, заставляя перемещаться рейки 9, а следовательно, и губки 12 навстречу друг к другу.. При сбросе давления шток 3 под действием пружины 10 воз354512
вращается в исходное состояние, т.е. губки расходятся.
Подбирая угол наклона зубьев 11 и величину хода штока 3, можно достигнуть усилий зажатия детали, значительно превьпиаюш 1х номинальное усилие силового цилиндра.
Для настройки схвата на захват 1Q деталей различного типоразмера необходимо фиксатором 5 расстопорить втулку 4 и установить губки 12 на необходимый типоразмер детали, перемещая одну из них, а другая переме- 15 щается на ту же величину с помощью втулки 4. После зтого фиксируют, втулку 4 и, соответственно, губки 12.
Формула изобретения
1.Схват промышленного робота, содержащий силовой цилиндр, поршень с зубчатым штоком, имеющим возможность взаимодействия с зубчатыми рейками и губками, закрепленными на них, отличающийся тем, что, с целью уменьшения.времени переналадки схвата на различный типоразмер детали, он снабжен зубчатой втулкой, установленной на торце штока с возможностью вращения относительно его продольной о,си и взаимодействия с зубчатыми рейками, кроме того, зубчатая втулка дополнительно снабжена фиксатором, выполненташ в виде подпружиненного пальца, установ- лень ого в зубчатой втулке с возможностью расположения в цилиндрических
углублениях, дополнительно выполнен- нъ1х на торцовой поверхности штока.
2.Схват по П.1, о т л и ч а ю- щ и и с я тем, что шаг фиксированного поворота зубчатой втулки равен
шагу зубьев потока.
В ид А
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват промышленного робота | 1986 |
|
SU1308464A1 |
| Захват промышленного робота | 1985 |
|
SU1288051A1 |
| Схват манипулятора | 1985 |
|
SU1337252A1 |
| МНОГОПОЗИЦИОННОЕ ЗАХВАТНОЕ УСТРОЙСТВО МАНИПУЛЯТОРА | 1992 |
|
RU2033918C1 |
| Захватное устройство робота | 1987 |
|
SU1423373A1 |
| Схват робота | 1981 |
|
SU994256A1 |
| Схват промышленного робота | 1979 |
|
SU844266A1 |
| Схват робота | 1986 |
|
SU1350004A1 |
| Захватное устройство | 1986 |
|
SU1355483A1 |
| СХВАТ МАНИПУЛЯТОРА | 2007 |
|
RU2347674C1 |
Изобретение относится к области машиностроения, в частности к захватным устройствам промышленных роботов. Целью изобретения является уменьшеi 2 3 ff в 13 7 -Фиг. 1 ние времени настройки. Схват состоит из корпуса, в котором расположен поршень 2 с плоским зубчатым штоком 3. На хвостовике штока установлена зубчатая втулка 4 с фиксатором 5. В пазах корпуса расположены зубчатые рейки 9, на которых закреплены губки 12. Шаг фиксации, зубчатой втулки 4 равен шагу зубьев плоского штока 3. Дпя настройки схвата на различный типоразмер деталей необходимо фиксатором 5 расстопорить втулку 4 и установить губки 12 на необходимый типоразмер детали, перемещая одну из них, а другая переместится на ту же величину с помощью втулки 4, после чего втулка 4 стопорится фиксатором 5. 1 3.п. ф-лы, 2 ил. . 13 (Л с со со ел 4 ел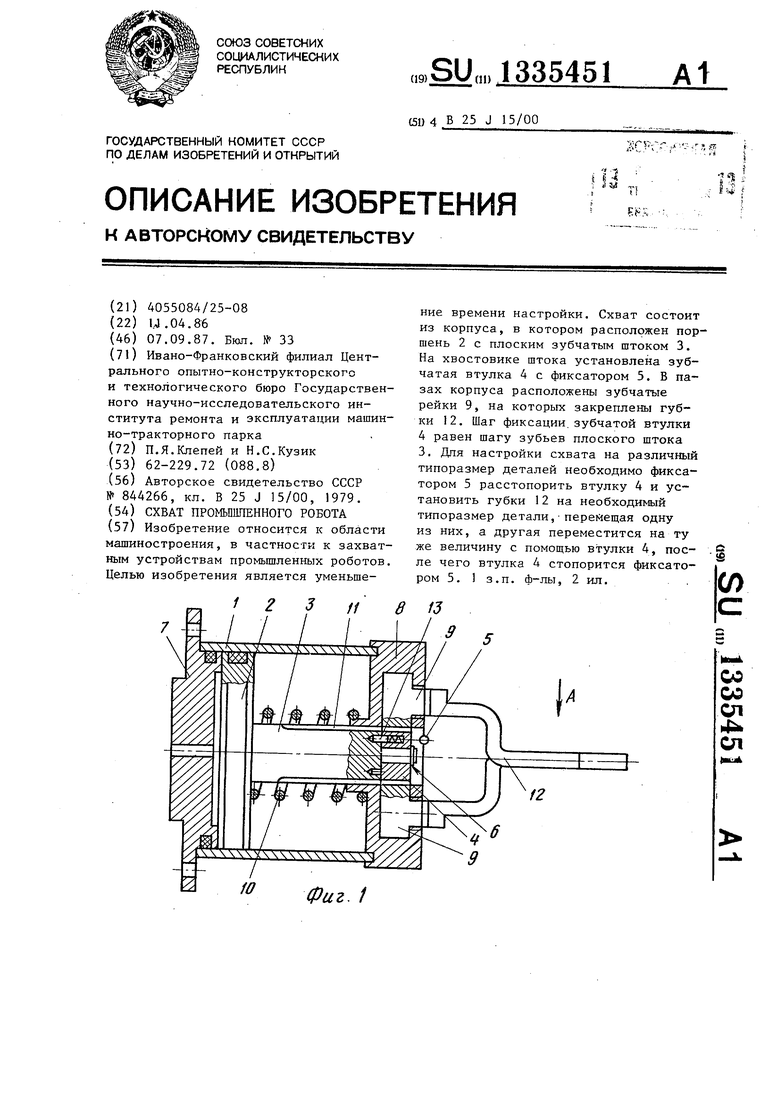
Редактор В.Петраш
Составитель А.Черньшов Техред Л. Олвйвык
Заказ 4010/16 . Тираж 951Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, и
фиг. 2
Корректор Л.Дилипенко
| Схват промышленного робота | 1979 |
|
SU844266A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
