Изобретение относится к машиностроению, в частности к захватным устройствам промьшленных роботов и манипуляторов.
Цель изобретения - расширение технологических возможностей.
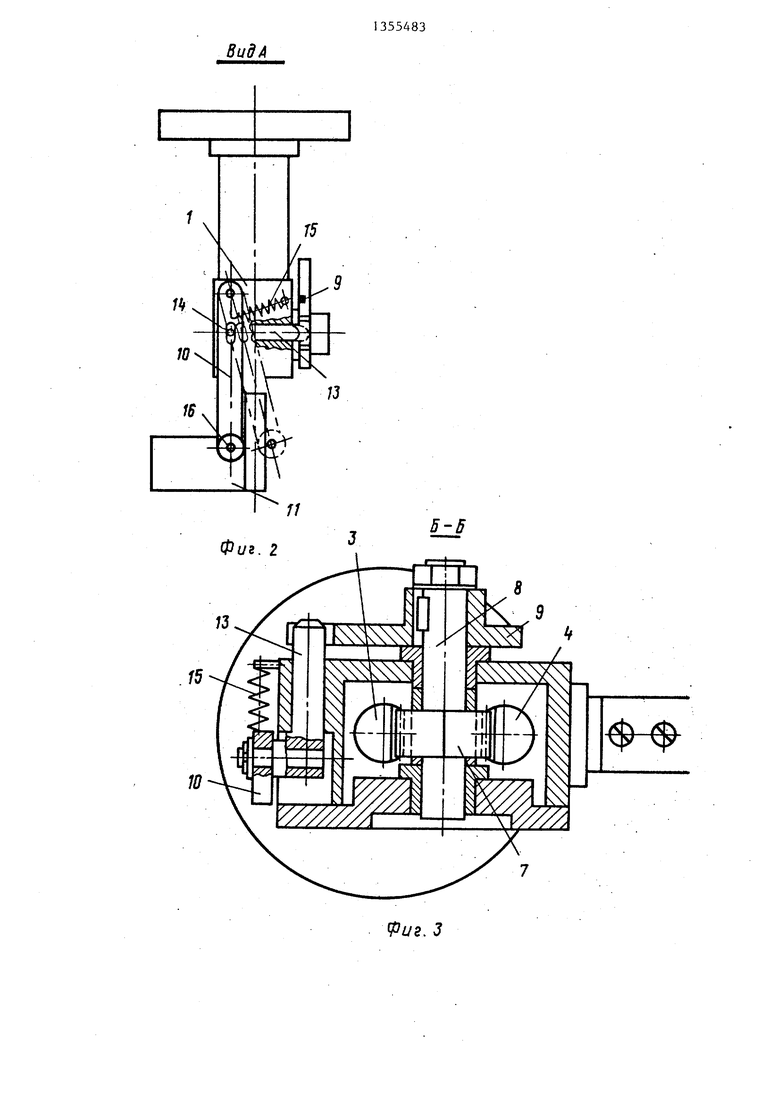
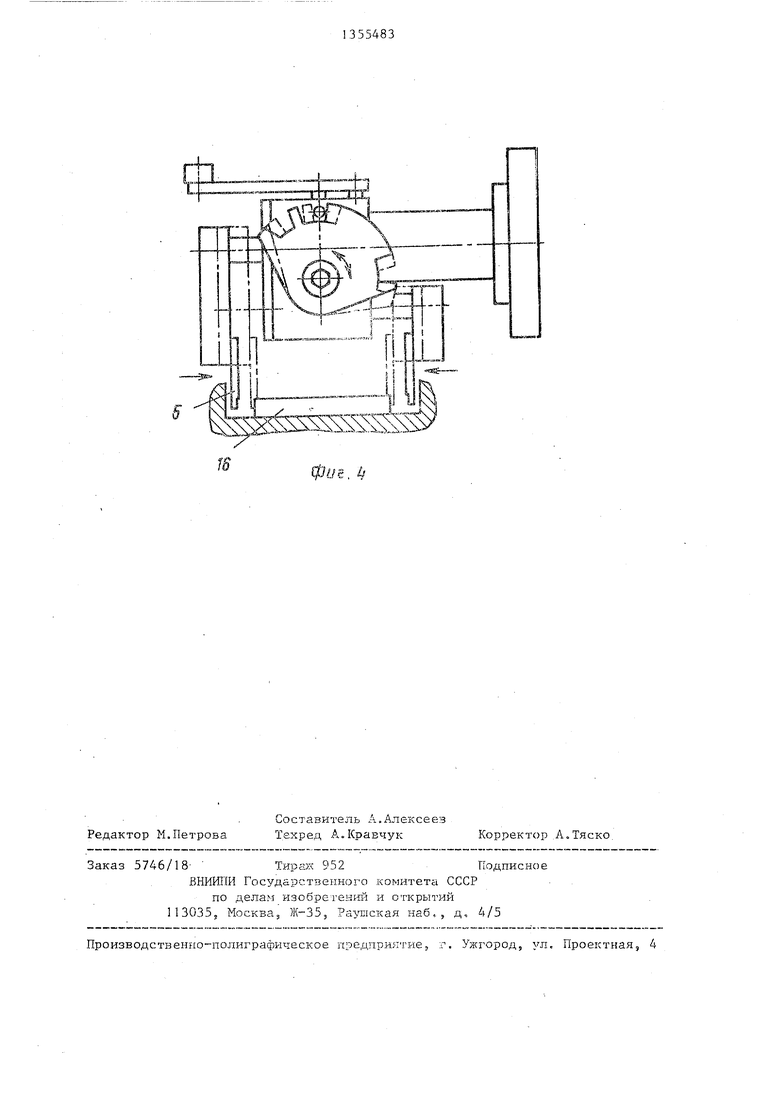
На фиг.1 изображено захватное устройство, общий вид; на фиг.2 - вид А на фиг.1; на фиг.З - разрез Б-Б на фиг.1; на фиг.4 - схема работы копира.
Захватное устройство состоит из корпуса 1, привода, например силового цилиндра 2, захватных органов,установленных в корпусе в направляющих и вьтолненных в виде реек 3 и 4 с губками 5. Рейка 3 связана с поршнем 6.
Рейки 3 и 4 связаны между собой посредством зубчатого колеса 7, жестко закрепленного на оси 8. На последней установлен копир 9, имеющий пазы. На корпусе 1 установлен с возможностью поворота рычаг.10 для взаимодействия с шаблоном 11, имеющим ролик 12 для взаимодействия с рейкой 3.
В корпусе I установлен с возможностью перемещения и взаимодействия с.кромками копира 9 фиксатор 12, образующий с рычагом 10 двухподвижные пары 14. Рычаг 10 подпружинен относительно корпуса 1 пружиной 15 и снабжен роликом 16.
Балон 11 закрепляется на кассете (не показана) с деталями на высоте, соответствующей программе работы манипулятора и типоразмеру детали.
Захватное устройство работает следующим образом.
При поступлении в систему управления сигнала о наличии кассеты с деталями манипулятор подводит захватное устройство к шаблону 11. При этом рычаг 10, взаимодействуя роликом 16 с выступом шаблона 1 1, поворачивается (фиг.2). Фиксатор 13 задвигается в корпус 1.
; Расстояние от нижнего торца рейки 3 до ролика 12 шаблона П определяется типоразмером детали. В бесшто- ковую полость силового цилиндра 2 подается сжатьш воздух. Поршень 6 с рейкой 3 совершают ход до упора в ролик 12 шаблона 11, одновременно поворачивая шестерню с осью 8 и выдвигая
рейку 4. Копир 9 поворачивается вместе с осью Вив конечном положении устанавливается таким образом, что
соответствующий типоразмеру детали паз копира 9 находится напротив фиксатора 13.Промьшшенный робот отводит в горизонтальной плоскости схват от шаблона. При этом пружина 15 возвращает рычаг 10 с фиксатйром 13 в исходное положение.
Захватное устройство устанавливается над деталью.
При подаче сжатого воздуха в штоковую полость силового цилиндра 2 рейка 3,.связанная с поршнем 6,вдвигается и через шестерню вдвигает рейку 4. Губки 5 зажимают деталь 16.Дпя отпускания детали 16 сжатый воздух
подается в бесштоковую полость силового цилиндра 2. При этом рейка 3, связанная с поршнем 6, выдвигается и через шестерню выдвигает рейку 4. Угол поворота зубчатого колеса 7,
а следовательно, и величина разведения губок 5 определяются размером соответствующего паза копира 9.
При поступлении сигнала в систему управления о приходе новой кассеты с
деталями захватное устройство подводится к шаблону и автоматически перенастраивается на новые типоразмеры деталей.
35
Формула изобретения
Захватное устройство, содержащее. корпус,, в направляющих которого установлены зажимные губки, закрепленные на зубчатых рейках, расположенных по обе стороны от зубчатого колеса, находящегося с ними в зацеплении, причем одна из реек связана с приводом, выполненным в виде силового цилиндра, отличающееся
тем, что, с целью расширения технологических возможностей, оно снабжено фиксатором, управляющим поворотным рычагом и копиром с пазами, при этом фиксатор выполнен в виде стержня,связанного с управляюш.им поворотным рычагом и установленного в корпусе с возможностью перемещения параллельно си поворота зубчатого колеса, с которым жестко связан копир, предназна- енньй для взаимодействия с фиксатоом.
Фиг. 2
us. 3
Ф/Je. i
Редактор М.Петрова
Составитель А.Алексеев Техред А.Кравчук
Заказ 5746/18- Тираж 952Подписное
ВНИИГШ Государствеиного комитета СССР
по делам изобретенш и открытий 1130355 Москва; Раз- шская наб. , д, 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Корректор А Тяско.
| название | год | авторы | номер документа |
|---|---|---|---|
| Транспортно-технологический ротор | 1988 |
|
SU1586795A1 |
| МНОГОПОЗИЦИОННОЕ ЗАХВАТНОЕ УСТРОЙСТВО МАНИПУЛЯТОРА | 1992 |
|
RU2033918C1 |
| Захватное устройство | 1986 |
|
SU1430261A1 |
| Захватное устройство | 1991 |
|
SU1815213A1 |
| Захватное устройство | 1984 |
|
SU1227465A1 |
| Захватное устройство | 1984 |
|
SU1197835A1 |
| Захватная головка манипулятора | 1986 |
|
SU1342727A1 |
| Захват промышленного робота | 1985 |
|
SU1288051A1 |
| Захват манипулятора | 1984 |
|
SU1333573A1 |
| Устройство для подачи бортовых крыльев к барабану для сборки покрышек пневматических шин | 1979 |
|
SU845345A1 |
Изобретение относится к захватным устройствам манипуляторов. Целью изобретения является расширение технологических возможностей устройства. Устройство подводится к шаблону 1i. При этом рычаг 10, взаимодействуя роликом с выступом шаблона 11, поворачивается. Фиксатор утапливается в корпус 1. Поршень 6 с рейкой 3 совер- ш ают ход до упора в ролик 12 шаблона 11, одновременно поворачивая шестерню 7 с осью 8 и выдвигая рейку 4. Копир 9 поворачивается вместе с осью 8 и соответствующий паз копира 9 устанавливается напротив фиксатора, При этом угол поворота зубчатого колеса 7 и величина разведения губок 5 определяют размером паза копира 9. 4 ил. (Л W ел С71 ОС оо П Фие. 1
| Захват манипулятора | 1978 |
|
SU848352A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
