(54) СХВАТ ПРОМЫШЛЕННОГО РОБОТА
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват промышленного робота | 1980 |
|
SU931467A1 |
| Схват промышленного робота | 1986 |
|
SU1364473A2 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1998 |
|
RU2149098C1 |
| Автоматизированный технологический комплекс для прессования изделий из порошков | 1991 |
|
SU1801048A3 |
| Схват промышленного робота | 1986 |
|
SU1308464A1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1996 |
|
RU2096167C1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 1995 |
|
RU2108232C1 |
| Схват промышленного робота | 1982 |
|
SU1065187A1 |
| Рука промышленного робота | 1979 |
|
SU837848A1 |
| СХВАТ ПРОМЫШЛЕННОГО РОБОТА | 2001 |
|
RU2247649C2 |
Изобретение относится к области машиностроения, в частности, к захватным устройствам промышленных роботов (манипуляторов).
Известен схват промышленного робота, содержащий губки, смонтированные на рейках, кинематически связанные с силовым пилиндром 1.
Недостатками известного схвата являются значительные габариты и узость технологических возможностей.
Цель изобретения - устранение указанных недостатков.
Цель достигается тем, что рейки снабжены Т-образными пазами и дополнительнымИ зубьями для крепления губок и расположены симметрично относительно оси силового цилиндра.
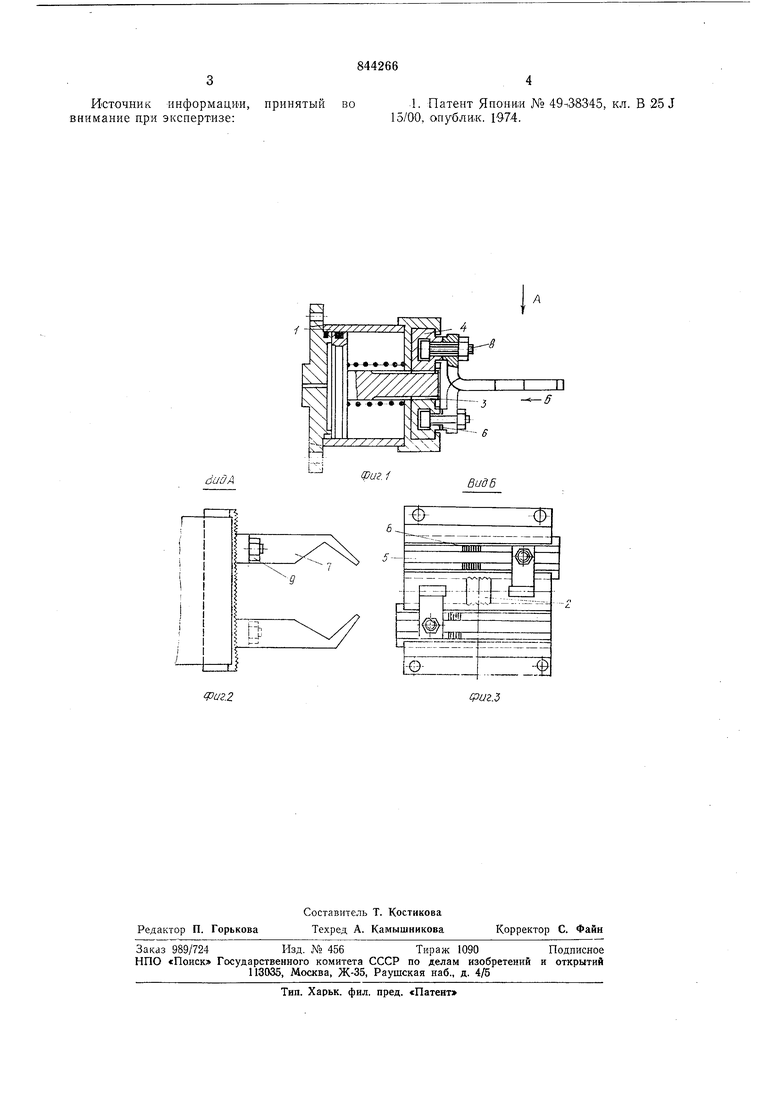
На фиг. 1 изображен схват, разрез; на фиг. 2 - вид А фИ|Г. 1; на фиг. 3 - вид Б фиг. 1.
Схват состоит из силового цил.индра / с плоским штоком 2, на гранях которого имеются косые зубья 3, входяш,и€ в зацепление с соответствующими зубьями на рейках 4, расположенных симметрично относительно оси силового цилиндра. Рейки снабжены Т-образным« пазами 5 и дополнительными зубьями 6 для крепления губок 7 при помощи болтов 8.
Работает схват следующим образом.
При подаче рабочей среды в силовой цилиндр шток 2 выдвигается, заставляя перемещаться рейки 4, а следовательно и губки 7 навстречу друг к другу. При сбросе давления шток 2 под действием пружины возвращается в исходное положение, т. е. губкп расходятся.
Подбирая угол наклона зубьев но отнощенпю к оси штока, достигнуть усилий зажатия детали значительно превышающих номинальное усилие цилиндра. Для настройки схвата для захвата различных по размерам деталей достаточно отпустить гайки 9 и переместить губки на соответствующее количество зубьев, после чего затянуть гайки.
Формула изобретения
Схват промышленного робота, содержащий губки, смонтированные на рейках, кинематически связаииые с силовым цилиндром, от л и ч а ю щи и с я тем, что, с целью уменьщения габаритов и расщирения технологических возможностей, рейки снабжены Т-образными пазами и дополнительными зубьями для крепления губок и расположены симметрично относительно оси силового цилиндра. 3 Источник информации, ирииятый внимание цри экспертизе:
dUUff
(Риг.1
В ид Б во1. Патент Япония №49 38345, кл. В 25 J 844266 4 15/00, опубли.к. 1974.
шшш
зшп
fe
