Изобретение относится к машиностроению и может быть использовано при создании роботов-манипуляторов для механизации монтажных и сборочных работ, требующих высокой точ- ности,
Целью изобретения является повышение точности позиционирования путе повышения жесткости конструкции.
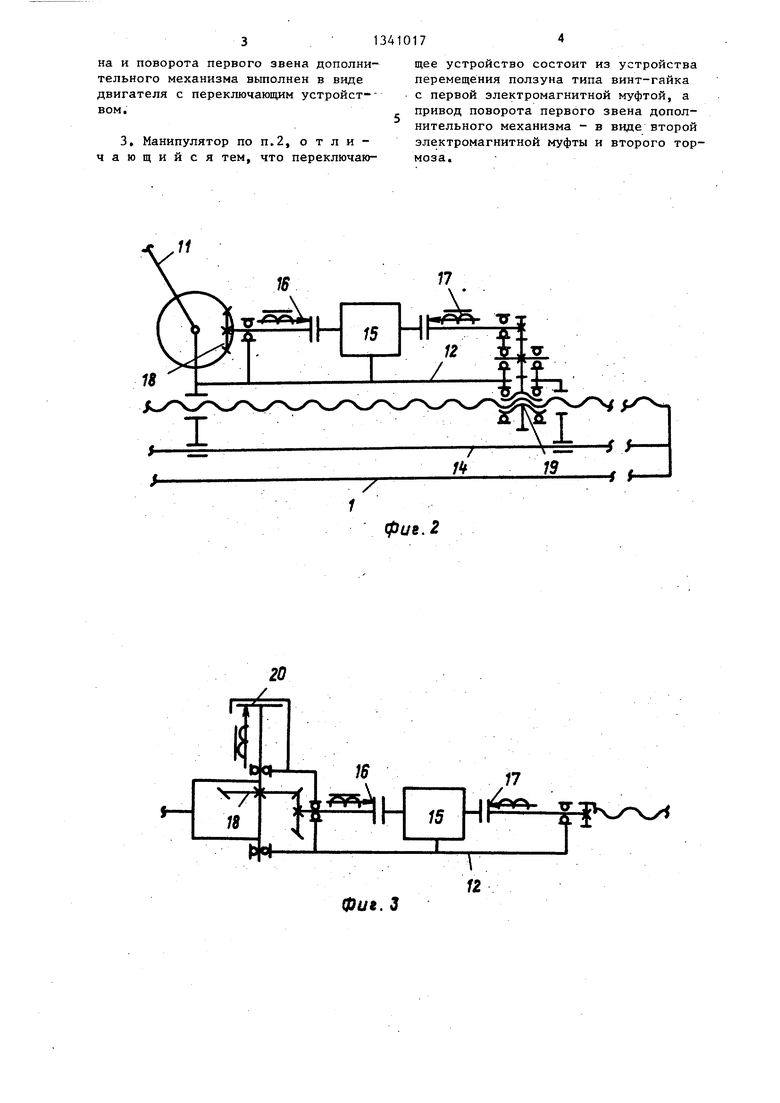
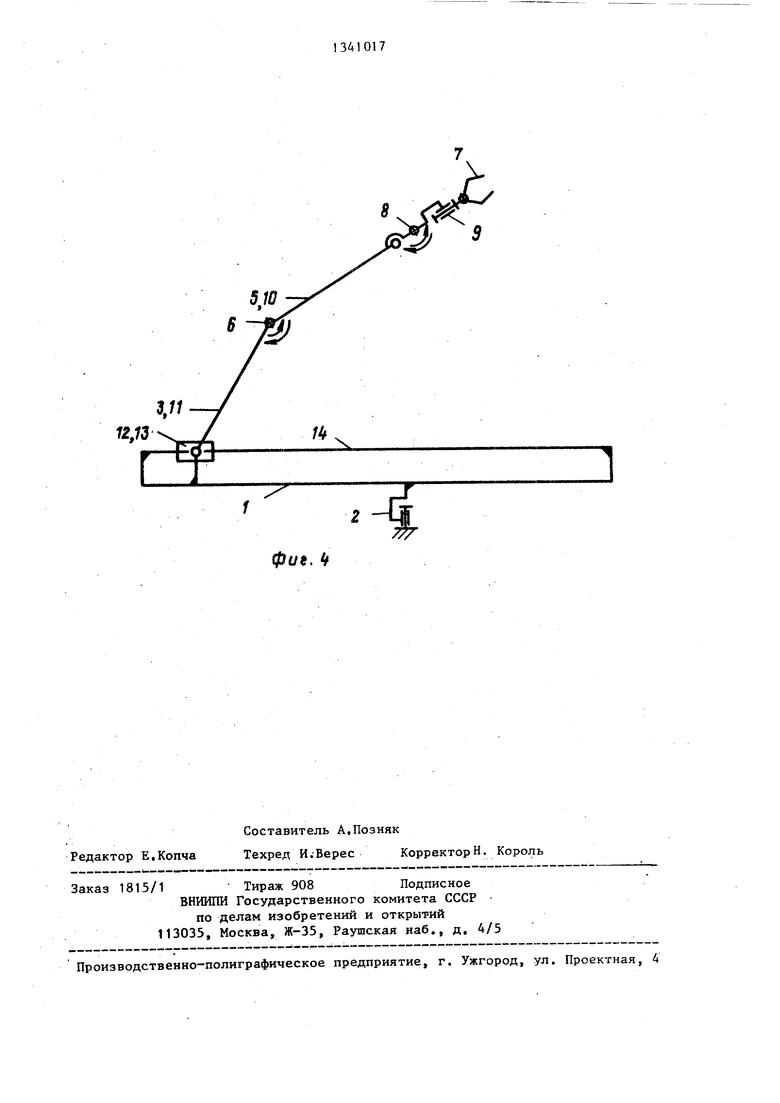
На фиг,1 изображен манипулятор в диметрической проекции; на фиг.2 - кинематическая схема переключающего устройства; -на фиг.З - кинематическая схема переключающего устройства, Вид сверху; на фиг.4 - кинематическая схема манипулятора в крайнем положении ползуна.
Манипулятор содержит основание 1 на поворотной колонне 2. К основанию шарнйрно прикреплено первое звено 3 основного механизма с тормозом 4. К звену 3 прикреплено второе звено 5, между звеньями 3 и 5 размещен приводной двигатель 6, Звено 5 шарнйрно связано со схватом 7, имеющим приводы 8 и 9 ориентации, и с вторым звеном 10 дополнительного двухзвенного механизма. Первое звено 11 этого механизма шарнйрно присоединено к ползуну 12, имеющему привод 13. Ползун 12 перемещается по направляющей 14. Привод 13 (фиг.2) состоит из приводного двигателя 15, электромагнитных муфт 16 и 17, конической передачи 18, связанной со звеном 11, а также передачи 19 винт-гайка, служащей для перемещения ползуна 12. Звено 11 снабжено электромагнитным тормозом 20.
Механизм работает следующим образом.
При перемещениях манипулятора в рабочей зоне ползун 12 размещен на направляющей 14 в том положении, когда шарниры обоих двухзвенных механизмов соосны. При этом положение схвата 7 в рабочей зоне задается углами поворота выходных звеньев приводов 6, В и передачи 18, которая подключается к двигателю 15 посредством электромагнитной муфты 16. Тормоза 4 и 20 при этом отключены. При подведении схвата 7 к точке позиционирования звено 3 затормаживается тормозом 4, звено 5 удерживается в заданном положении приводом 6. Двигатель 15 отключается муфтой 16 от .передачи 18 и подключается муфтой 17
0
5
к передаче 19 винт-гайка. Тормоз 20 отключен. Ползун -12 перемещается по направляющей 14 посредством передачи 19 на расстояние, требуемое для образования звеньями 3,5 10 и 11 кинематически замкнутой цепи. Двигатель 15 отключается от передачи 19 и подключается к передаче 18. Положение схвата 7 вблизи точки позиционирования корректируется приводами 6,8 и 9 и положением звена 11, связанного. с передачей 18, При этом тормоза 4 и 20 отключены,
После окончания корректировки положения схвата 7 двигатели 15 и привод 6 отключаются и конструкция затормаживается тормозами 4 и 20. Затем после выполнения операций, требующих высокую точность позиционирования, механизм приводится в исходное состояние в обратном порядке.
Формула изобретения
1. Манипулятор, содержащий основание, привод, основной хвухзвенный I механизм, первое звено которого щарнирно связано с основанием, а на вто- 0 ром звене шарнйрно установлен схват, отличающийся тем, что, с целью повьшения точности позиционирования путем повышения жесткости : конструкции, он сна-бжен ползуном, имеющим вoзмoжнoq,ть продольного перемещения относительно основания, жестко установленным на основании приводом ползуна и дополнительным двухзвенным механизмом, первое звено которого шарнйрно установлено на ползуне и соединено с его приводом, а второе шарнйрно соединено с соответствующим звенон основного двухзвенного механизма с помощью дополнительно установленной на нем оси, кроме того, первые звенья обоих механизмов равны по длине, а длина второго звена дополнительного механизма равна расстоянию от оси шарнира, соединяющего звенья основного двухзвенного механизма, до заказанной оси. 2,-Манипулятор по п,1, отличающийся тем,, что привод основного механизма расположен на оси шарнира, соединяющего звенья основного механизма, а на оси, соединяющей первое звено основного механизма с основанием, установлен первьш тормоз, кроме того, привод перемещения ползу5
0
5
0
5
на и поворота первого звена дополнительного механизма выполнен в виде двигателя с переключающим устройст-- вом.
3, Манипулятор по п.2, отличающийся тем, что переключающее устройство состоит из устройства перемещения ползуна типа винт-гайка с первой электромагнитной муфтой, а привод поворота первого звена дополнительного механизма - в виде второй электромагнитной муфты и второго тормоза.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1987 |
|
SU1414625A1 |
| Манипулятор А.И. полетучего | 1985 |
|
SU1247262A1 |
| Автоматический манипулятор | 1989 |
|
SU1660951A1 |
| Манипуляционная система | 1990 |
|
SU1784451A1 |
| Механическая рука с программным управлением | 1980 |
|
SU994249A1 |
| Манипулятор | 1987 |
|
SU1701420A1 |
| Манипулятор | 1988 |
|
SU1627400A1 |
| Манипулятор | 1986 |
|
SU1364467A1 |
| Шарнир манипулятора | 1982 |
|
SU1057274A1 |
| Манипулятор | 1982 |
|
SU1085804A1 |
Изобретение относится к машиностроению и может быть использовано при создании роботов-нанипуляторов для механизации монтажных и сборочных работ, требующих высокой- точности. Целью изобретения является повышение точности позиционирования путем повышения жесткости конструкции. Лри перемещениях манипулятора в рабочей зоне ползун 12 размещен на направляющей 14 таким образом, ,что шарниры обоих двухзвенных механизмов соосны. При этом положение схвата 7 в рабочей зоне задается углами поворота приводов 6, 8 и 13. При подведении схвата 7 к точке позиционирования звено 3 затормаживается тормозом 4, звено 5 удерживается в заданном положении приводом 6. Затем переключающее устройство переключается таким образом, что привод 13 перемещает ползун по направляющей 14 на расстояние, требуемое для образования звеньями 3,5, 10 и 11 кинематически замкнутой цепи. Положение схвата 7 вблизи точки позиционирования корректируется приводами 6, 8 и 9 и положением звена 11, связанного с приводом 13. 2 з.п. ,4-лы, 4 ил, 7 (Л СгЭ 4: .1
7
Т
к
/
7 18
jaq-J-I 16,7
И. J
12
. J
фие.2
.
12
510
Фи9. fy
| Hunt К.Н | |||
| Geometry of robotic devices | |||
| -Mech.Eng.Trans, Inst, Eng | |||
| Austral, Г982, № 4, 7. |
