Изобретение относится к машиностроению, в частности к манипуляторам для подъема и транспортировки грузов.
Цель изобретения - повышение надежности и упрощение конструкции за счет сокращения числа подвижных элементов в механизме уравновешивания.
На чертеже показана кинематическая схема предлагаемого манипулятора
Манипулятор содержит основание в виде каретки 1, размещенной на направляющей 2. На каретке 1 закреплена механическая рука 3 с захватным устройством 4. Рука выполнена в виде трубы 5, на которой закреплена зубчатая рейка 6. В зацеплении с рейкой 6 находится зубчатое колесо 7, кинематически связанное через редуктор 8 с двигателем 9, В трубе 5 размещены упруг ий элемент 10 и перегородка 11, в отверстии которой размещен стержень 12, на одном конце которого закреплена вилка 13, д на другом - упор 14. На оси 15 в вилке 13 смонтирован подвижный блок 16 полиспаста, а на оси 17 - неподвижный относительно трубы 5 блок 18. Канат 19 закреплен одним концом на каретке 1, размещен в блоках 16, 18 и 20 и другим концом закреплен на оси 17.
Устройство работает следующим образом.
Манипулятор перемещается на каретке 1 по направляющей 2 и останавливается над рабочим местом. Включается двигатель 9 и рука 3 с захватным устройством 4 с помощью зубчато-реечной передачи 6-7 опускается, захваты- д IM упором и перегородкой.
Составитель Ю.Вильчинский Редактор Ю.Середа Техред Л.Олийнык Корректор И.Муска
Заказ 4882/17 Тираж 951Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 5/7
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
вает груз и затем поднимается,при этом уравновешивание руки и груза осуществляется сжатием упругого элемента 10.
Полиспаст позволяет,в несколько , раз по сравнению с величиной хода руки уменьшить деформацию упругого элемента 10, что улучшает уравновешивание на всей длине хода.
Формула изобретения
Манипулятор,содержащий основание, механическую руку с захватным устройством, привод и механизм, уравновешива- ния руки,состоящий из полиспаста,канат которого одним концом закреплен на основании,а другим - на элементе, связанном с уравновешиваемой рукой, а также стержня, связанного с рукой, и упругого элемента, взаимодействующего со стержнем, отличающийся тем,что,с целью повышения надежности и упрощения конструкции за счет сокращения числа подвижных элементов в механизме уравновешивания, механическая рука выполнена в виде трубы, в полости которой закреплена поперечная перегородка с отверстием, а на концах стержня механизма уравновешивания закреплены дополнительные упор и ви1тка,причем в этой вилке и на конце упомянутой трубы смонтированы соответственно подвижные и неподвижные блоки полиспаста, при этом стержень размещен в отверстии перегородки, а упругий элемент смонтирован на стержне между указан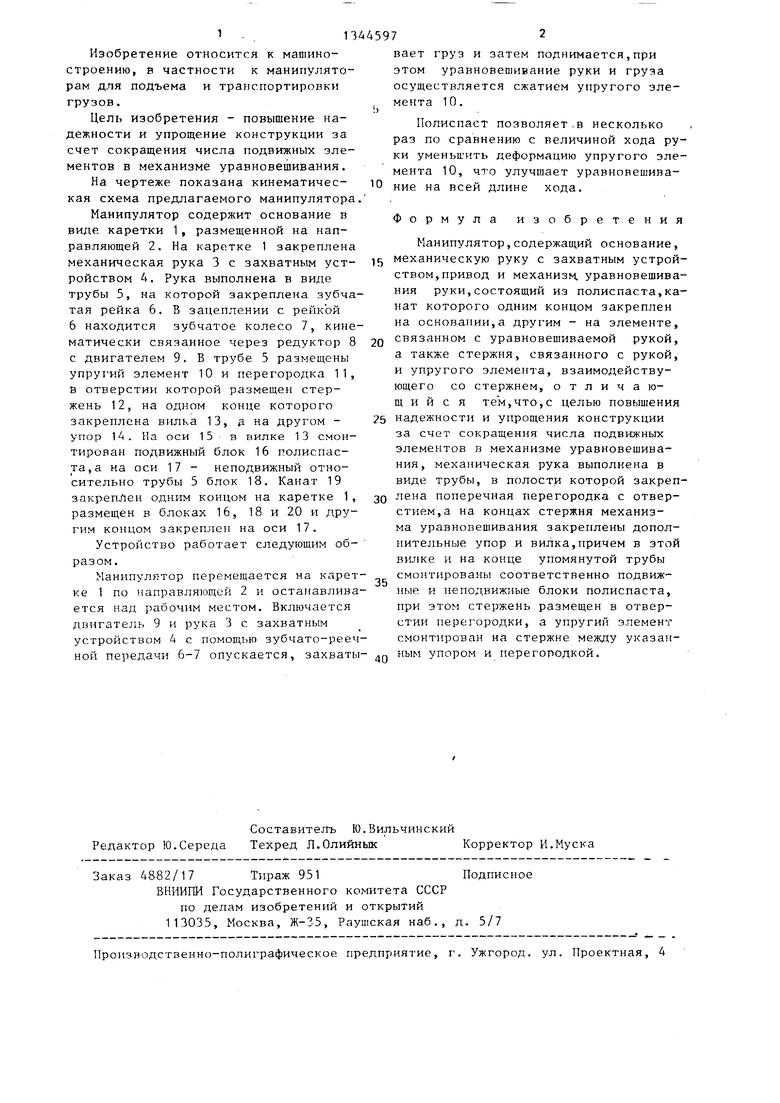
| название | год | авторы | номер документа |
|---|---|---|---|
| Модульный манипулятор | 1980 |
|
SU952578A1 |
| Манипулятор | 1982 |
|
SU1085805A1 |
| Манипулятор | 1985 |
|
SU1308463A1 |
| Крепеукладчик | 1988 |
|
SU1645537A1 |
| Подвеска грузозахватного устройства | 1983 |
|
SU1119967A1 |
| Устройство для разрушения горных пород | 1987 |
|
SU1506105A1 |
| Башенный кран | 1978 |
|
SU775043A1 |
| Механизм перемещения секций телескопической стрелы | 1986 |
|
SU1368255A1 |
| Уравновешенный манипулятор | 1987 |
|
SU1491698A1 |
| Манипулятор | 1984 |
|
SU1197832A1 |
Изобретение относится к области машиностроения, в частности к манипуляторам для подъема и транспортировки грузов. Цель изобретения - повышение надежности и упрощение конструкции за счет сокращения числа подвижных элементов в механизме уравновешивания. При вертикальном перемещении захватного устройства 4 с грузом происходит деформация уравновешивающего упругого элемента 10 за счет перемещения стержня 12 с упором 14 в этом же направлении, при этом величина хода элемента 10 в сравнении с величиной хода захвата меньше на величину кратности полиспаста, состоящего из системы блоков 16, 18, 20 и каната 19, закрепленного одним концом на каретке 1, а другим - на оси 17. Привод перемещения захватного устройства осуществляется от двигателя 9, редуктора 8 и зубчато-реечной передачи 6,7. 1 ил. -с S С/ с 00 4 4 СП СО 
| Модульный манипулятор | 1980 |
|
SU952578A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
